Nonlinear Vibrations of Innovative One-Way Clutch in Vehicle Alternator - MDPI
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
inventions
Article
Nonlinear Vibrations of Innovative One-Way Clutch
in Vehicle Alternator
Xiaotian Xu 1 ID
, Gang Chen 1, *, Joshua Colley 1 , Pengrui Li 1 and Mohamad Qatu 2
1 College of IT & Engineering, Marshall University, Huntington, WV 25755, USA; xu33@marshall.edu (X.X.);
cooley_2007@hotmail.com (J.C.); li75@live.marshall.edu (P.L.)
2 College of Technology, Eastern Michigan University, Ypsilanti, MI 48197, USA; mqatu@emich.edu
* Correspondence: chenga@marshall.edu; Tel.: +1-304-634-8138
Received: 27 May 2018; Accepted: 26 July 2018; Published: 30 July 2018
Abstract: One-way clutches have been proposed for vehicle alternators. The clutch can play an
important role in reducing vibrations of the vehicle engine accessory system, but the severe vibrations
of the clutch subsystem limit its stability and durability. This paper investigates the nonlinear
vibrations of a one-way clutch between the accessory pulley and the alternator shaft. The one-way
clutch is modelled as a discontinuous stiffness system, and the simplified model is analyzed using
discontinuous transform to determine the periodic, primary resonance and the sub and super
harmonic resonance solutions. The typical system model is numerically solved and the spectrum
and phase plots are characterized. The results give a big picture of and insights into the nonlinear
vibration features of one-way clutch system. A relevant US patent is pending.
Keywords: vehicle alternator; engine system; front-end accessory; belt-pulley system; one-way
clutch; nonlinear dynamics
1. Introduction
Vehicle engine front-end accessory drive systems are widely used in passenger vehicles and
heavy-duty trucks. Using a single belt, engine power is delivered from the crankshaft to a variety
of accessories such as the air conditioner, alternator, power steering, water pump among others.
Crankshaft torque pulsations from the cylinder combustion in the engine, and dynamic accessory
torques could excite severe rotational vibrations of the subsystems [1–3]. The periodic firing of the
engine cylinders causes the crankshaft to have periodic motion superimposed on a steady angular
velocity. This periodic motion is transferred to various engine accessories. As the engine speed
increases, the frequency of crankshaft pulses increases, causing belt tension drop and belt slip on
the pulley. The alternator, with its very large moment of inertia, is most susceptible to dynamic
tension fluctuations; hence, there is a need to find ways to reduce the steady-state peak tension
drop across it. To address the issues of vibration, one-way clutch pulleys have been developed and
used in vehicle alternators [4–9]. With the aim of detaching the alternator from the rest accessory
subsystem during high speed transients and to reduce the transmission of torsional vibrations from
the internal combustion engine to the engine accessories, one-way clutches have been used more and
more frequently to decouple the alternator system and reduce the system’s vibrations. The one-way
clutches with wrap springs have been introduced into the generator to allow the high inertia element
to overrun the system when the pulley is decelerating.
To avoid the impact generated during system engagements, the wrap spring one-way clutch, also
called over-running alternator de-coupler (OAD), as shown in Figure 1 was used. It has a torsional
wrap spring-damper that connects the pulley to the outer ring of the clutch [4–8]. In wrap-spring
Inventions 2018, 3, 53; doi:10.3390/inventions3030053 www.mdpi.com/journal/inventions
Inventions 2018, 3,
Inventions 2018, 3, 53
x FOR PEER REVIEW 22 of
of 10
10
spring clutches, a helical spring, typically wound with square-cross-section wire, is used. The torsion
clutches, a helical spring, typically wound with square-cross-section wire, is used. The torsion spring
spring also acts as a dampening mechanism which greatly reduces the belt vibration.
also acts as a dampening mechanism which greatly reduces the belt vibration.
pulley.
Figure 1. Schematic of one-way clutch alternator pulley.
The application of the one-way clutch has a strong influence on the entire system’s dynamic
The application of the one-way clutch has a strong influence on the entire system’s dynamic
behavior. Under certain circumstances, the unique features of the one-way clutch allow the belt spans
behavior. Under certain circumstances, the unique features of the one-way clutch allow the belt spans
to experience large transverse vibrations or the clutch to have larger torsional vibrations. There are
to experience large transverse vibrations or the clutch to have larger torsional vibrations. There are
many research studies dedicated to the vibration analysis of a one-way clutch. To accurately predict
many research studies dedicated to the vibration analysis of a one-way clutch. To accurately predict
the entire system’s dynamic behavior, the motions of the one-way clutch need to be considered in the
the entire system’s dynamic behavior, the motions of the one-way clutch need to be considered in
models. This results in a strong nonlinear system due to the special stiffness discontinuous property
the models. This results in a strong nonlinear system due to the special stiffness discontinuous
of the one-way clutch. Balaji and Mockensturm established a mathematical model of accessory
property of the one-way clutch. Balaji and Mockensturm established a mathematical model of
system with seven pulleys with a one-way clutch, and the piece-wise linear system is numerically
accessory system with seven pulleys with a one-way clutch, and the piece-wise linear system is
solved for specific cases using the Runge-Kutta method [10]. Ding and Zu solved a similar model
numerically solved for specific cases using the Runge-Kutta method [10]. Ding and Zu solved a
numerically and used fast Fourier transform to derive the natural frequency of the nonlinear
similar model numerically and used fast Fourier transform to derive the natural frequency of the
vibration [11]. For the similar model, Ding and Hu used two different approaches: (a) The nontrivial
nonlinear vibration [11]. For the similar model, Ding and Hu used two different approaches: (a) The
solutions of viscoelastic model; and (b) the iterative solution, to determine the nontrivial equilibriums
nontrivial solutions of viscoelastic model; and (b) the iterative solution, to determine the nontrivial
of dynamical system numerically. They also studied the natural frequencies of the system by using
equilibriums of dynamical system numerically. They also studied the natural frequencies of the system
the Galerkin method [12]. Zhu and Parker established a model of the accessory system with two
by using the Galerkin method [12]. Zhu and Parker established a model of the accessory system
pulleys having a one-way clutch, and the dynamical system was analyzed by using the harmonic
with two pulleys having a one-way clutch, and the dynamical system was analyzed by using the
balance method, with the dynamical properties characterized in terms of spring stiffness, excitation
harmonic balance method, with the dynamical properties characterized in terms of spring stiffness,
amplitude, and moment inertia of pulleys [13]. Zeng and Shangguan established a model of the
excitation amplitude, and moment inertia of pulleys [13]. Zeng and Shangguan established a model
accessory system, with three pulleys having a one-way clutch, which consists of a driving pulley, a
of the accessory system, with three pulleys having a one-way clutch, which consists of a driving
driven pulley and a tensioner. The dynamical system is analyzed numerically by using the Gear
pulley, a driven pulley and a tensioner. The dynamical system is analyzed numerically by using the
method, with the dynamical properties being characterized and optimized in terms of clutch spring
Gear method, with the dynamical properties being characterized and optimized in terms of clutch
stiffness, excitation amplitude and moment inertia of pulleys [14]. In-vehicle experimental tests are a
spring stiffness, excitation amplitude and moment inertia of pulleys [14]. In-vehicle experimental tests
significant way to investigate the vibrations of alternator pulleys. An experimental procedure,
are a significant way to investigate the vibrations of alternator pulleys. An experimental procedure,
including proper selection of parameters, measures and sensors, to evaluate the potential vibrations
including proper selection of parameters, measures and sensors, to evaluate the potential vibrations of
of each alternator pulley is proposed by Michelotti, Pastorelli et al. [15]. The existing research
each alternator pulley is proposed by Michelotti, Pastorelli et al. [15]. The existing research characterizes
characterizes many linear and nonlinear vibration properties of one-way clutch for many specific
many linear and nonlinear vibration properties of one-way clutch for many specific cases. There has
cases. There has been a lack of overall understanding of global characteristics of the strong nonlinear
been a lack of overall understanding of global characteristics of the strong nonlinear vibrations of
vibrations of one-way clutch system. For practicing accessory drive designers in the
one-way clutch system. For practicing accessory drive designers in the automotive/heavy vehicle
automotive/heavy vehicle industries, the natural frequencies and dynamic response are of utmost
industries, the natural frequencies and dynamic response are of utmost interest. Predicting the system’s
interest. Predicting the system’s dynamic behavior in the design stage is important because the
dynamic behavior in the design stage is important because the changes are difficult to accomplish once
changes are difficult to accomplish once prototypes are built. This requires a comprehensive model
of the one-way clutch to characterize the system’s properties, particularly all kinds of resonances. In
Inventions 2018, 3, 53 3 of 10
prototypes
Inventions 2018,are
3, x built. ThisREVIEW
FOR PEER requires a comprehensive model of the one-way clutch to characterize 3 ofthe
10
system’s properties, particularly all kinds of resonances. In this paper, the functional principles of the
this paper,clutch
one-way the functional principlesinvestigated
will be theoretically of the one-way clutch will
and explained be theoretically
while investigated
the comprehensive and
resonances
explained
features willwhile the comprehensive
be reported. The analytical resonances features
results clearly show willthat
be there
reported.
exist The analytical
primary, results
subharmonic,
clearly show that there
and superharmonic exist primary,
resonances. subharmonic,
The numerical analysis and superharmonic
illustrated resonances.
the detailed Thestudy
cases. This numerical
offers
analysis
some insights for the product design into how to pinpoint and avoid varied resonance cases. how
illustrated the detailed cases. This study offers some insights for the product design into
to pinpoint and avoid varied resonance cases.
2. Mathematical Model
2. Mathematical Model
Based on the real system of the wrap-spring one-way clutch [4–13], the model is given as follows.
When the rotations
Based on the real ofsystem
the wrap-spring ends, for one-way
of the wrap-spring which theclutch pulley[4–13],
rotation
theexceeds
model isthe accessory
given shaft
as follows.
rotation,
When the then the clutch
rotations is engaged. Power
of the wrap-spring ends, for transmission
which the pulley takes place from
rotation the driving
exceeds to the driven
the accessory shaft
pulley. For
rotation, then thethealternate
clutch iscase where Power
engaged. accessory rotation istakes
transmission less than
placepulley rotation,
from the drivingthetowrap-spring
the driven
diameter
pulley. Fordecreases
the alternateand the
caseclutch
wheredisengages;
accessoryno torque is transmitted.
rotation less than pulleyA theoretical
rotation, model of one-way
the wrap-spring
clutch on a two-pulley system is shown in Figure 2. The driving pulley
diameter decreases and the clutch disengages; no torque is transmitted. A theoretical model of one- represents the crankshaft,
and clutch
way its motion is specifiedsystem
on a two-pulley as harmonic
is shown oscillation.
in FigureIn 2. vehicle
The drivingapplications, engine firing
pulley represents pulsations
the crankshaft,
induce
and periodic
its motion is fluctuations in crankshaft
specified as harmonic speed at
oscillation. In the firing
vehicle frequency. engine
applications, The driven
firing pulley was
pulsations
connected
induce to thefluctuations
periodic accessory. The one-way clutch
in crankshaft speedis at integrated
the firingbetween the accessory
frequency. The driven pulley andwas
pulley the
alternator to
connected shaft.
the The mathematical
accessory. modelclutch
The one-way of the system is given
is integrated by the the
between following equations:
accessory pulley and the
alternator shaft. The mathematical ( .. model . of the system is given by the following equations:
J+θ
p p + c +θ
p p + k p+ p
θ + g −p
θ − θ =
a = M cos ωt
.. . (1)
(1)
+
Ja θ a + c+a θ a + k+ a θa + g − θa − θ = 0 0
p =
in which: and are the vibration angle of driven pulley and alternator shaft, respectively;
in which: θ p and θ a are the vibration angle of driven pulley and alternator shaft, respectively; J p and
and are the moment
Ja are the moment of inertiaof inertia of driven
of driven pulley
pulley andand alternator
alternator shaft,
shaft, respectively;
respectively; c p cand
p and
kp k p are
are the
the damping and stiffness constants associated with driven pulley, respectively; =
damping and stiffness constants associated with driven pulley, respectively; k p = 2Kb r p , and c a and 2 2 , and
and aredamping
k a are the the damping and stiffness
and stiffness constants
constants associated
associated with the with the of
rotor rotor of alternator,
alternator, respectively.
respectively. M and
Mω are respectively the amplitude and frequency of excitation acted on driven pulley due to due
and ω are respectively the amplitude and frequency of excitation acted on driven pulley to
engine
engine firing excitation.
firing excitation. The torque
The torque transmitted
transmitted betweenbetween the accessory
the accessory pulleypulley and alternator
and alternator shaft
shaft is is
given
given as
as follows,follows,
(
θ p − θ, a , >
kd − θ p > θa
g θ−p − θ a = = (2)
(2)
0, 0, >θ p > θ a
Theoreticalmodel
Figure2.2.Theoretical
Figure modelof
ofone-way
one-wayclutch
clutchin
inaccessory
accessorysystem.
system.
The
Theequation
equationdescribed
describedby byEquation
Equation(1) (1)has
hasbeen
beenstudied
studiednumerically
numericallyandandtheoretically
theoreticallyunder
under
particular
particularconditions
conditions[13].
[13].
Generally,
Generally, Equation
Equation (1)
(1) represents
represents aa strong
strong nonlinear
nonlinear system.
system. Consider
Considerthe
thesimplest case,θ p ≥ ≥
simplestcase, θa ;
; the system is linear and the squares of the natural frequencies are derived
the system is linear and the squares of the natural frequencies are derived as as
, =( + )/2 ∓ + −4 − /2 (3)
Inventions 2018, 3, 53 4 of 10
v
2 !
k011
u 0 0 0
2 k022 u k11 k022 k11 k22 k012 k021
ω21,22 =( + )/2 ∓ t + −4 − /2 (3)
Jp Ja Jp Ja J p Ja J p Ja
in which k011 = k p + k d , k012 = k d = k021 and k022 = k a + k d . Furthermore, letting k d = 0,
which deteriorates to the natural frequencies of two independent systems: The accessory system
and the uncoupled alternator. For the case with both θ p ≥ θ a and θ p ≤ θ a , the system exhibits a
nonlinear feature.
Consider the case in which the driven pulley mode and alternator shaft mode motion can be
decoupled, and we just discuss driven pulley mode, then Equation (1) can be approximated by
.. .
J p θ p + c p θ p + k p θ p + k d θ p − θ a = M cos ωt, θ p ≥ θa
.. . (4)
J p θ p + c p θ p + k p θ p = M cos ωt, θ p ≤ θa
By using the approach given in References [16,17], a comprehensive analytical solution is
systematically derived through the discontinuous transformation, and the results are given in
next section.
3. Theoretical Analysis
Closed form analytical solutions are of great significance in configuring the overall vibration
characteristics. The problem described by Equation (4) is identical to the harmonic force excited
by the unsymmetrical piecewise-linear spring-damping system. Because the non-linearities in this
problem cannot be assumed to be small, a general analytical solution, by only using conventional
methods such as the perturbation method, is not feasible. By using the discontinuous transformation
method [16,17], a far-from resonance solution, nearly a primary resonance solution, a super-harmonic
resonance solution and a sub-harmonic resonance solution are systematically derived as follows:
3.1. Free Vibration (under Unit Initial Condition)
1 ∞ sin nα0 cos(ω1 + nω0 )t + cos(ω1 − nω0 )t
ω0 ω
θp = cos ω1 t + 1 − 0 cos(ω2 t − β 0 ) + ∑
2ω1 2ω1 π n =1 n
(5)
ω1 ∞ sin nα0 cos[(ω1 + nω0 )t + β 0 ] + cos[(ω2 − nω0 )t + β 0 ]
− ∑
πω2 n=1 n
p q
in which ω1 = k p /J p , ω2 = (k p + k d )/J p , ω0 = 2ω1 ω2 /(ω1 + ω2 ), α0 = πω0 /(2ω1 ),
β 0 = π (1 − ω2 /ω1 )/2.
3.2. Far-From Resonance Solutions
M ω22 − ω12 M ω12 + ω22 − 2ω 2
θp = + sin ωt
π J p ω12 − ω 2 ω22 − ω 2 2J p ω12 − ω 2 ω22 − ω 2
2F ω22 − ω12 ∞
cos 2nωt
+ 2
2 ∑
π J p ω1 − ω ω2 − ω n=1 (2n + 1)(2n − 1)
2 2
1 (6)
+ [ A1 sin ω1 t + A2 sin(ω2 t + β 0 )]
2
A ∞ cos(ω1 − nω )t − cos(ω1 + nω )t
+ 1 ∑
π n=1,3,5 n
∞
cos[(ω2 − nω )t + β 0 ] − cos[(ω1 + nω )t + β 0 ]
A2
− ∑
n=1,3,5 π n
in which β 0 = −πω2 /ω, A1 = Mω/ J p ω1 ω 2 − ω12 , A2 = −Mω/ J p ω2 ω 2 − ω22 .
Inventions 2018, 3, 53 5 of 10
3.3. Near-Primary Resonance Solutions
" #
2M 3M π Jp
θp = + sin ωt − cos ωt
(ω22 − ω12 ) J p (2∆ + 1) 4ω 2 J p (2∆ + 1)2 2ω 2 J p (2∆ + 1)
M ∞ cos(n − 1)ωt − cos(n + 1)ωt
+ 2 ∑ (7)
πω J p (2∆ + 1) n=1,3,5
Inventions 2018, 3, x FOR PEER REVIEW
n 5 of 10
M (ωt − π ) ∞ sin(n − 1)ωt + sin(n + 1)ωt
− Solutions
3.3. Near-Primary Resonance 2 ∑
πω J p (2∆ + 1) n=1,3,5 n
2 3
=2 / ω 2 − ω 2 .
where ∆ = ω12 − ω + sin − cos
1 + 1) 4
( − 2 ) (2∆ (2∆ + 1) 2 (2∆ + 1)
cos( − 1) − cos( + 1)
3.4. Super-Harmonic Resonance +Solutions
(2∆ + 1) (7)
, ,
( − ) sin( − 1) + sin( + 1)
M 2n2 ω 2 −− ω 2 −(2∆ ω12+ 1) 2M (ω22 − ω12
θp = 2
sin , , +
ωt 2
cos ωt
π J p (n2 − 1) ω12 − n2 ω 2 ω 2
where ∆= ( − J p)/( (n2 −−1) ).ω 4
(8)
2M (ω22 − ω12
−
3.4. Super-Harmonic Resonance Solutions2 cos nωt, n = 2, 3, 4, · · ·
π J p (n2 − 1) ω12 − n2 ω 2 ω 2
(2
− − ) 2 (( − )
= sin + cos
( − 1) ( − 1) ( − )
3.5. Sub-Harmonic Resonance Solutions (8)
2 (( − )
− cos , = 2, 3, 4, ⋯
For the case of ω2
ω1 , it can(be − 1) ( −out that
derived ) the approximate solution in the proximity of
sub-harmonic resonant frequency is:
3.5. Sub-Harmonic Resonance Solutions
(n −solution
For the case of ≫ , it can be derived out
(n+that
1)ωtthe approximate
h i 1)ωt in the proximity of
cos − cos
4l M frequency is: ∞
sub-harmonic resonant l l
θp =
π 2 J p ω1 (l 2 − 1)(ω − lω1 ) ∑ ( + 1) n( − 1)
, l = 2, 4, 6, · · · (9)
4 cos
n=1,3,5 − cos
= , = 2, 4, 6, ⋯ (9)
( − 1)( − )
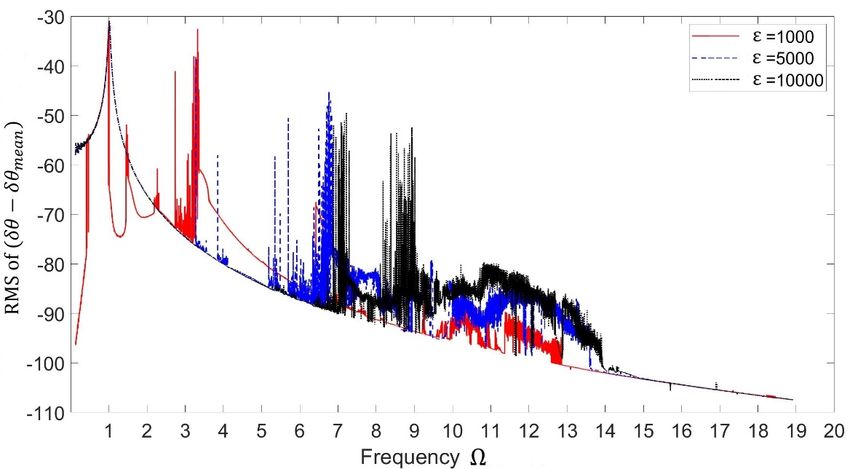
Figure 3 illustrates a typical result of the response amplitude as a function of the excitation
, ,
frequency ration.
FigureThe curve in
3 illustrates Figureresult
a typical 3 exhibits a series amplitude
of the response of resonantas apeaks including
function the 1/2th and
of the excitation
frequency
1/3th order ration. The curve
superharmonic in Figure 2nd
resonance, 3 exhibits
and a3rdseries of resonant
order peaks including
subharmonic the 1/2th
resonance as and
well as the
primary resonance. It is noted that in existing research, certain experiments [9,15,18] were the
1/3th order superharmonic resonance, 2nd and 3rd order subharmonic resonance as well as conducted
primary resonance. It is noted that in existing research, certain experiments [9,15,18] were conducted
and compared with preceding linear vibration theory of a one-way spring clutch.
and compared with preceding linear vibration theory of a one-way spring clutch. This paper
This paper proposed
an advanced nonlinear
proposed vibration
an advanced theory
nonlinear of thetheory
vibration one-wayof theclutch which
one-way clutchencompasses the linear
which encompasses the cases,
and as such,
linearitcases,
is consistent with
and as such, it isall existing
consistent experimental
with results. results.
all existing experimental
Figure 3. The frequency response function ( k=d 4, = 0.05).
Figure 3. The frequency response function ( = 4, ξ = 0.05).
kp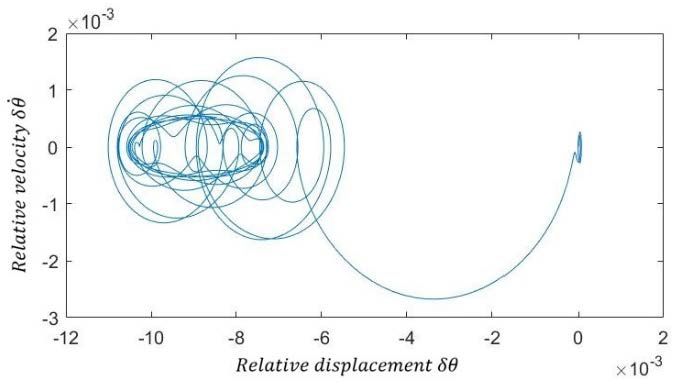
Inventions 2018, 3, 53 6 of 10
4. Numerical Analysis
In this section, the numerical analysis of a typical one-way clutch system, characterized by
Equation (1), 2018,
Inventions is presented. Table 1 shows the parameters for the typical system. The6 frequency,
3, x FOR PEER REVIEW of 10
ω0 , is considered as the natural frequency for the linear single q degree of freedom system when the
4. Numerical Analysis
accessory is not equipped with one-way clutch, and ω0 = k p / J p + Ja . Corresponding to the
case of theIn this section,
linear system the numerical
which analysis in
is mentioned of Section
a typical2,one-way clutch system,natural
the dimensionless characterized by
frequencies are
Ω1 = ω Equation
/ω =(1), is presented.
0.987 and Ω Table
= ω 1/ω
shows
= the
6.931parameters
for the for the typical
values in system.
Table 1. The frequency,
These two ,
dimensionless
1 0 2 2 0
is considered as the natural frequency for the linear single degree of freedom system when the
natural frequencies could be the criterion to evaluate how the system works under different conditions.
accessory is not equipped with one-way clutch, and = /( + ). Corresponding to the case
of the linear system which is mentioned in Section 2,for
Table 1. Parameters thetypical cases. natural frequencies are Ω =
dimensionless
⁄ = 0.987 and Ω = ⁄ = 6.931 for the values in Table 1. These two dimensionless natural
frequencies could be the criterion to evaluate how the system works under different conditions.
Radius of Driven Pulley 0.0286 (m)
Radius of crankshaft 0.04 m
Table 1. Parameters for typical cases.
Driven Pulley Moment of Inertia 0.0016 (kgm2 )
Alternator
RadiusMoment of Inertia
of Driven Pulley 0.0050(m)
0.0286 (kgm2 )
Modal damping
Radius ratio
of crankshaft 0.04 m5%
DrivenBelt stiffness
Pulley Moment of Inertia 250(kgm
0.0016 kN/m
2)
Clutch spring
Alternator stiffness
Moment of Inertia 50–1500
0.0050 Nm/rad
(kgm 2)
Excitation amplitude
Modal damping ratio 0.001
5% rad
Preload
Belt stiffness 2.3 Nm
250 kN/m
Clutch spring stiffness 50–1500 Nm/rad
Excitation amplitude
To conduct the numerical analysis of the dynamic model 0.001with
rad the above parameters using
Preload 2.3 Nm
MATLAB, the discontinuous stiffness nonlinearity which was indicated by Equation (2) can be
efficiently approximated as a continuous function. A smoothed function is used to approximate
To conduct the numerical analysis of the dynamic
model with the above parameters using
the discontinuous
MATLAB, thestiffness nonlinearity
discontinuous θ p − θ a . which was indicated by Equation (2) can be
stiffnessgnonlinearity
efficiently approximated as a continuous function. A smoothed function is used to approximate the
1
g(δθ () =− K).[1 + tanh(εδθ )]δθ
discontinuous stiffness nonlinearity
d (10)
2
1
( )= [1 + tanh( )] (10)
in which δθ = θ p − θ a , and the ε is the 2smooth constant which is usually a large positive number,
in whichε = =
for instance, − [13].
10, 000 , and The
the clutch torque constant
is the smooth is approximated by a hyperbolic
which is usually tangent
a large positive function
number,
as shown in Figure=4.10,000
for instance, What[13].
weThe clutch
want thetorque is approximated
approximated by a hyperbolic
function to be is atangent function function,
proportional as
shown in Figure 4. What we want the approximated function to be is a proportional
with the slope being Kd when δθ ≥ 0 and being 0 when δθ ≤ 0. As shown by the results in Figure 4, function, with
the slope being when ≥ 0 and being 0 when ≤ 0. As shown by the results in Figure 4, the
the approximation is obviously not accurate when ε = 10 because the curve deviates from the desired
approximation is obviously not accurate when = 10 because the curve deviates from the desired
trajectory, and the satisfied approximation is likely to be obtained for large ε > 100. This is because
trajectory, and the satisfied approximation is likely to be obtained for large > 100. This is because
the results of ε =
the results of 100 andand
= 100 ε = 10, 000 look
= 10,000 looktotohave
have overlapped each
overlapped each other
other in figure.
in the the figure. The actual
The actual
effectseffects
of different values of will be further investigated when conducting the frequency
of different values of will be further investigated when conducting the frequency analysis
ε analysis by
by employing these
employing these values below.values below.
Figure
Figure 4. The
4. The clutch
clutch torque(smooth
torque (smooth function)
function) with
withdifferent smooth
different constants.
smooth constants.
Inventions 2018, 3, 53 7 of 10
Inventions 2018, 3, x FOR PEER REVIEW 7 of 10
Inventions 2018, 3, x FOR PEER REVIEW 7 of 10
From numerical
From numerical investigation,
investigation,we
wecan
canestimate
estimate the
the effects of
of the
theapproximations
approximationswith with a different
a different
smooth
smoothFrom numerical
constant,
constant,ε, for investigation,
frequency
, for we can of
frequencyanalysis
analysis estimate
ofthe the effects
the system
system of thein
as shown
shown approximations
in with
Figure5.5.InInthis
Figure this ΩΩ
a different
case,
case, is is
thethe
smooth
ratio
ratio constant,
of excitation
of excitation , for frequency
frequencyand
frequency analysis
andnatural of the
naturalfrequency
frequencyofsystem
of the as shown
the system.
system. in Figure 5. In this case, Ω is the
ratio of excitation frequency and natural frequency of the system.
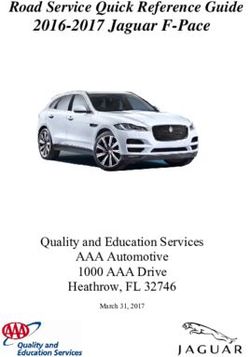
Figure5.5.The
Figure Thefrequency
frequency responses
responses with
with different
differentvalues
valuesofof ε.
.
Figure 5. The frequency responses with different values of .
From investigation we found that the approximation is compromised in numerical analysis
From
with From= investigation
1000 because we
investigation wefound
the foundthat
trajectory is the
that the approximation
not approximation
only discontinuous is compromised
is compromised
and disorderly, ininbut
numerical
numerical analysis
analysis
also violate the
with = 1000
natural=frequencies
withε because
1000 because the trajectory
the trajectory
we derived is
above.isAnnot only discontinuous
notacceptable
only discontinuous
approximation and disorderly,
and disorderly,
is attained but but also violate
also violate
by using thethe
= 5000.
natural
natural frequencies
frequencieswe
The approximation is derived
we derived
well above.
above. An
accomplished Anbyacceptable approximation
using =approximation
acceptable 10,000, the curve isisattained
attained byby
is continuous, and=εwe
using
using 5000.
= can
5000.
TheTheapproximation
clearlyapproximation
see the peaks is iswell
ofwellaccomplished
aroundby
accomplished
resonance by and εΩ=
Ωusing
using =. Thus,
10,000,
10, 000, the curve
the
a value curve > is iscontinuous,
continuous,
10,000 and
and
is employed we we
can
when can
clearly
clearly see the
see peaks
the peaks ofofresonance
resonance
conducting the following numerical analysis.1 around
around Ω
Ω and
and ΩΩ2 . Thus,
Thus, aa value
value ε >> 10,000
10, 000 isis employed
employed when
when
conducting
conducting In the thethe following
following
engine numerical
numerical
front-end analysis.
analysis.
accessory system, the excitation frequency is the engine firing frequency
In In
which the the engine
engine
changes in afront-end
front-end
wide range. accessory
accessory system,
system,
The root mean the
the excitation
excitation
square frequency
frequency
(r.m.s.) of dynamic isisthe
the engine
enginefiring
amplitude firingfrequency
of the frequency
relative
which changes
pulley-accessory
which changes inin a widerange.
arotation,
wide range.−The
Theroot
root meanexcitation
, versus
mean square (r.m.s.)
square of
of dynamic
frequency, amplitude
for different
dynamic values
amplitude ofof
the
of relative
damping
the relative
ratios ( =
pulley-accessory 3%, 5% and
rotation,8%), −
are ,
calculatedversus
and excitation
the results frequency,
are shown for
in
pulley-accessory rotation, δθ − δθmean , versus excitation frequency, for different values of damping different
Figure 6 values
for the of damping
parameters
ratios
listed
ratios (ξ in =
(= Table
3%,3%,5%5%and
1. and8% 8%), arecalculated
), are calculated and and the
the results
results areare shown
shownininFigure Figure6 6for forthe
theparameters
parameters
listed in
listed in Table 1. Table 1.
Figure 6. The frequency responses with different damping ratios.
Figure6.6.The
Figure Thefrequency
frequencyresponses
responses with
with different
different damping
dampingratios.
ratios.Inventions 2018, 3, x FOR PEER REVIEW 8 of 10
Inventions 2018, 3, x FOR PEER REVIEW 8 of 10
The
The frequency
frequency responseresponse for for = = 8%8% showsshows that that thethe behavior
behavior can can be be considered
considered as as linear.
linear. For
For
= 3% and 5% , non-linear phenomena appear. It indicates
= 3% and 5% , non-linear phenomena appear. It indicates that the system is sensitive to the
Inventions 2018, 3, 53 that the system is sensitive
8 of 10 to the
excitation
excitation amplitude.
amplitude. As As we we can can see,
see, there
there are are twotwo resonant
resonant regions
regions withinwithin the the two two natural
natural
frequencies.
frequencies. The The system
Thefrequency is linear
system isresponse when
linear when the
for ξ the clutch
= clutch
8% shows is engaged. The
that the behavior
is engaged. non-linearity
can be considered
The non-linearity occurs
occursas near
near the
the second
linear. second
resonant region
For ξ = 3% due
and to5%,the decoupling
non-linear of
phenomena the clutch
appear. where
It the
indicates
resonant region due to the decoupling of the clutch where the spring between pulley and accessory spring
that the between
system is pulley
sensitive and
to theaccessory
shaft excitation Theamplitude. Asand
we can see, thereshaft
are two resonant regions within the twonear
natural frequencies.resonant
shaft is
is inactive.
inactive.
The system
The
is
pulley
pulley
linear when
andthe accessory
accessory
clutch is
shaft rotate
engaged.
rotate
The
in
in opposite
non-linearity
directions
opposite occurs
directions
near
near
the
the
the second
second
second
resonant
resonant
region. This
region. This behavior is called out-of-phase motion, and it tends to clutch disengagement. The
regionbehavior
due to the is called out-of-phase
decoupling of the clutch where motion, and between
the spring it tendspulleyto clutch disengagement.
and accessory shaft is The
amplitude
amplitude is higher
is higher near
nearand the first
theaccessory resonant
first resonant region
region because
because of the
of the in-phase motion of pulley and
inactive. The pulley shaft rotate in opposite directions nearin-phase
the secondmotionresonant of pulley and
region.
accessory
accessory shaft. This means that the pulley and accessory shaft move in the same direction and
Thisshaft. This
behavior ismeans
called that the
out-of-phase pulley
motion, andand accessory
it tends to shaft
clutch move in the
disengagement. same The direction
amplitude and are
are
excited more
is directly
higher near theby the
first excitation
resonant region from crankshaft
because
excited more directly by the excitation from crankshaft vibration. of the vibration.
in-phase motion of pulley and accessory shaft.
In This means thatwe the pulley and a accessory shaft move in the same direction and are excited more directly
In this
this section,
section, we employ employ a hyperbolic
hyperbolic tangent tangent function
function to to approximate
approximate the the discontinuous
discontinuous
by
nonlinearity the excitation
of the from
system crankshaft
when vibration.
conducting numerical analysis. Actual effects
nonlinearityInofthisthe system
section, we employwhena conducting
hyperbolic tangent numerical
function analysis.
to approximate Actual effects of
the discontinuous of different
different
parameters,
parameters, smooth
smooth constant and damping ratio , on the numerical analysis of the mathematical
nonlinearity of constant
the system when andconducting
dampingnumericalratio ,analysis.
on the numerical
Actual effectsanalysis
of different ofparameters,
the mathematical
model are investigated.
smooth constant
model are investigated. ε and damping ratio ξ, on the numerical analysis of the mathematical model
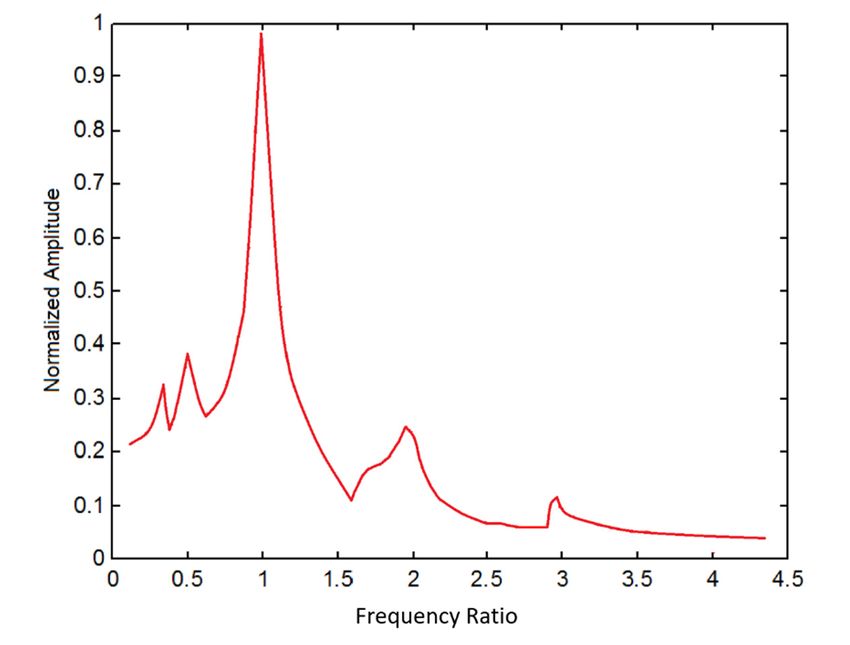
The
Theare phase plot
plot and
investigated.
phase and time
time response
response are are shown
shown in in Figures
Figures 77 and and 8,8, respectively,
respectively, by by employing
employing aa
of = = 150
150 rad/s. −
sample The phase plot and time response are shown in Figures 7 and 8, respectively, by employing
sample excitation
excitation frequency
frequency of rad/s. TheThe relative
relative displacement
displacement ,, which
which is is − ,, waswas
considered a sample
as an excitation
important frequency
value of
to ω = 150
investigate rad/s.
the The relative
response ofdisplacement
the dynamic δθ, which
system. is θ p − θ a,
considered as an important value to investigate the response of the dynamic system.
was considered as an important value to investigate the response of the dynamic system.
.
Figure 7. Phase
Figure plot:
7. Phase velocity,
plot: , vs.
velocity, δθ, vs. displacement,
displacement, .
Figure 7. Phase plot: velocity, , vs. displacement,
δθ. .
Figure 8. Time response of δθ.
Figure 8. Time response of .
Figure 8. Time response of .
The corresponding periodogram power spectral density estimate of δθ and waterfall plot of the
The corresponding
Thespectra
corresponding periodogram
periodogram power spectral density estimate of and
and waterfall
waterfall plot
plot of
of the
of δθ are shown in Figures 9power
and 10. spectral density estimate of the
spectra of
spectra of are shown in Figures 9 and
are shown in Figures 9 and 10. 10.Inventions 2018,
Inventions2018, 3,3,53x FOR PEER REVIEW
2018,3, 9 of 10
Inventions x FOR PEER REVIEW 9 9ofof1010
Figure9.
Figure
Figure 9.9.Periodogram
Periodogrampower
Periodogram powerspectral
power spectraldensity
spectral densityof
density ofofδθ.. .
Figure 10.Waterfall
Figure Waterfall spectrum.
Figure 10.
10. Waterfall spectrum.
spectrum.
5.5. Conclusions
5. Conclusions
Conclusions
InIn thiswork,
work, nonlinearvibrations
vibrations ofone-wayone-way clutchininvehicle
vehicle alternatorsystemsystem weremodeled modeled
In this
this work, nonlinear
nonlinear vibrations of of one-way clutch
clutch in vehicle alternator
alternator system were were modeled
and analyzed.AAspecial
and special attentionwas was paidtotocomprehensive
comprehensive resonanceproperties properties ofthe the nonlinear
and analyzed.
analyzed. A special attentionattention was paid paid to comprehensive resonance
resonance properties of of the nonlinear
nonlinear
system
system with bilinear stiffness non-smooth features. A two degrees-of-freedom lumped parameters
system with bilinear stiffness
with bilinear stiffness non-smooth
non-smooth features.
features. A two degrees-of-freedom
A two degrees-of-freedom lumped lumped parameters
parameters
model wasemployed
model employed toaccount account fortorsional
torsional vibrationsofofthe the accessorysystemsystem withone-way
one-way clutch
model waswas employed to to account for for torsional vibrations
vibrations of the accessory
accessory system with with one-way clutch clutch
and
and the
the model
model was
was then
then simplified
simplified asas a a one
one degree-of-freedom
degree-of-freedom system
system soso asas toto derive
derive a a
and the model was then simplified as a one degree-of-freedom system so as to derive a comprehensive
comprehensiveclosed
comprehensive closedform formsolution.
solution.AAnon-smooth
non-smooth transformationwas wasusedusedtotoanalyzeanalyzethe the
closed form solution. A non-smooth transformation wastransformation
used to analyze the simplified model and
simplified modeland
simplified andderive
derivethethesolution.
solution.Our Our theoreticalanalysis
analysis hasshown shownthatthatthe
themathematical
mathematical
derive the modelsolution. Our theoretical analysis theoretical
has shown that thehas mathematical model is capable
model
model isis capable
capable ofof predicting
predicting a a full
full range
range of
of dynamic
dynamic responses
responses properties
properties including
including thetheprimary,
primary,
of predicting a full range of dynamic responses properties including the primary, subharmonic and
subharmonic
subharmonic and
and superharmonic
superharmonic resonances.
resonances. Numerical analysis was conducted for the two degrees-
superharmonic resonances. Numerical analysisNumerical analysis
was conducted for was conducted
the two for the two degrees-
degrees-of-freedom lumped
of-freedomlumped
of-freedom lumpedparameters
parametersmodel, model,which
whichpinpointed
pinpointedthe the truedominant
dominantnonlinear
nonlinearvibration
vibration
parameters model, which pinpointed the true dominant nonlineartrue vibration modes. A global analysis
modes.
modes. A global analysis
A globalscenarios
analysisthat showed
showed different
different scenarios
scenarios that allowed
that understanding an
allowed an in-depthin-depth and general
and general
showed different allowed an in-depth and general of the one-way clutch
understanding ofthe
understanding theone-way
one-wayclutchclutch dynamicstotobebedeveloped,
developed, whereasthe the numericalanalysis analysis
dynamics to be of developed, whereas thedynamics
numerical analysis helped towhereas elaborate thenumerical
detailed vibration
helped toelaborate
helped elaboratethe thedetailed
detailedvibration
vibrationpatterns
patternsrelated
relatedtotospecific
specificparameters
parametersand anddefine
definecritical
critical
patternstorelated to specific parameters and define critical behaviors of the system. It is noted that
behaviors
behaviors of
of thethe system.
system.and It is noted
It isanalyzing
noted that that conventionally
conventionally modeling
modeling and
and analyzing
analyzing of torsional
of torsional
conventionally modeling of torsional vibrations of engine front-end accessory drive
vibrationsofofengine
vibrations engine front-endaccessoryaccessory drivesystemsystemhave
havetreated
treatedrealrealglobal
globalsystem
system tobebea amultiple
multiple
system have treatedfront-end
real global system drive to be a multiple degree-of-freedom systemto with sufficient
degree-of-freedom
degree-of-freedom system
system with sufficient
withparameter
sufficientsystemaccuracy.
accuracy. As
As usedsuch,
such,inthethe lumped
lumped parameter
parameter system
system for model
model
accuracy. As such, the lumped model this paper is accurate enough the
used
used in this
in this of paper
paper is accurate
is accurate enough
enough for the application of alternator clutch
for the application of alternator clutch subsystem. subsystem.
application alternator clutch subsystem.
AuthorContributions:
Author Contributions:
Contributions: Conceptualization,
Conceptualization,
Conceptualization, G.C.
G.C. G.C.
and andMethodology,
and
M.Q.; M.Q.; Methodology,
M.Q.; Methodology, G.C.;
G.C.;
G.C.; Software, Software,
Software,
X.X.; X.X.;
Validation,X.X.;
J.C.,
Validation,
P.L.; Formal J.C., P.L.;
Analysis, Formal
G.C., X. X.; Analysis, G.C.,
Investigation, X.
J.C., X.;
P. L., Investigation,
X.X. J.C., P.
Validation, J.C., P.L.; Formal Analysis, G.C., X. X.; Investigation, J.C., P. L., X.X. L., X.X.
Funding:This
Funding: Thisresearch
researchwas
wasfunded
fundedby
byALT
ALTAmerica
AmericaINC
INCgrant
grantnumber
numberMURC216132.
MURC216132.Inventions 2018, 3, 53 10 of 10
Funding: This research was funded by ALT America INC grant number MURC216132.
Conflicts of Interest: The authors declare no conflict of interest.
References
1. Abrate, S. Vibrations of belts and belt drives. Mech. Mach. Theory 1992, 27, 645–659. [CrossRef]
2. Beikmann, R.S.; Perkins, N.C.; Ulsoy, A.G. Design and analysis of automotive serpentine belt drive systems
for steady-state performance. ASME J. Mech. Des. 1997, 119, 162–168. [CrossRef]
3. Sheng, G.; Liu, K.; Otramba, J.; Pang, J.; Dukkipati, R.V.; Oatu, M. Model and experimental investigation of
belt noise in automotive accessory belt drive. Int. J. Veh. Noise Vib. 2004, 1, 68–82. [CrossRef]
4. King, R.; Monahan, R. Alternator pulley with integral overrunning clutch for reduction of belt noise.
SAE Tech. Pap. 1999, 27–32. [CrossRef]
5. Xu, J.; Antchak, J. New technology to improve the performance of front end accessory drive system.
SAE Tech. Pap. 2004. [CrossRef]
6. Cooley, J.; Chen, G. One-Way over-Running Alternator Clutch. U.S. Patent 5598913A, 7 June 1995.
7. Michelotti, A.; Paza, A.L.; Maurici, A.; Foppa, C.; Drabison, J.S.; Morris, Z.; Monahan, R.E. Functional testing
of alternator pulleys in chassis dynamometer. SAE Tech. Pap. 2013. [CrossRef]
8. Michelotti, A.; Paza, A.L.; Maurici, A.; Foppa, C. Future trends in the conceptual design alternator pulleys.
SAE Tech. Pap. 2012. [CrossRef]
9. Fitz, F.; Cali, C. Controlled alternator decoupling for reduced noise and vibration. SAE Tech. Pap. 2010.
[CrossRef]
10. Balaji, R.; Mockensturm, E.M. Dynamic analysis of a front-end accessory drive with a decoupler/isolator.
Int. J. Veh. Des. 2005, 39, 208–231. [CrossRef]
11. Ding, H.; Zu, J.W. Steady-state responses of pulley-belt systems with a one-way clutch and belt bending
stiffness. J. Vib. Acoust. 2014, 136. [CrossRef]
12. Ding, J.; Hu, Q. Equilibria and free vibration of a two-pulley belt-driven system with belt bending stiffness.
Acta Mech. 2017, 228, 3307–3328. [CrossRef]
13. Zhu, F.; Parker, R.G. Non-linear dynamics of a one-way clutch in belt-pulley systems. J. Sound Vib. 2005,
279, 285–308. [CrossRef]
14. Zeng, X.; Shangguan, W. Modeling and optimization dynamic performances for an engine front end accessory
drive system with overrunning alternator decoupler. Int. J. Veh. Noise Vib. 2012, 8, 261–274. [CrossRef]
15. Michelotti, A.; Pastorelli, P.; Ferreira, A.; Berto, L.; Takemori, C.K. In-vehicle experimental tests to evaluate
the performance of alternator pulleys. SAE Tech. Pap. 2017. [CrossRef]
16. Pilipchuk, V.N. Analytical study of vibrating systems with strong non-linearities by employing saw-tooth
time transformation. J. Sound Vib. 1996, 192, 43–64. [CrossRef]
17. Pilipchuk, V.N.; Vakakis, A.F.; Azeez, M.A.F. Study of a class of subharmonic motions using a non-smooth
temporal transformation (NSTT). Phys. D: Nonlinear Phenom. 1997, 100, 145–164. [CrossRef]
18. Pastorelli, P.; Michelotti, A.; Berto, L.; Ferreira, A. Analytical models for spring one-way clutch and torsional
vibration dampening systems with experimental correlation. SAE Tech. Pap. 2017. [CrossRef]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access
article distributed under the terms and conditions of the Creative Commons Attribution
(CC BY) license (http://creativecommons.org/licenses/by/4.0/).You can also read