Lec 01: Introduction to Computer Vision - ECE/CS 5582/479 Computer Vision
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Fall 2021: Zoom@533 999 8759, pwd: mcc2020, Thr 5:30pm-8:15pm
ECE/CS 5582/479 Computer Vision
Lec 01: Introduction to Computer Vision
Zhu Li
Dept of CSEE, UMKC
Office: FH560E, Email: lizhu@umkc.edu, Ph: x 2346.
http://l.web.umkc.edu/lizhu
slides created with WPS Office Linux and EqualX LaTex equation editor
Z. Li: ECE 5582 Computer Vision, 2021 p.1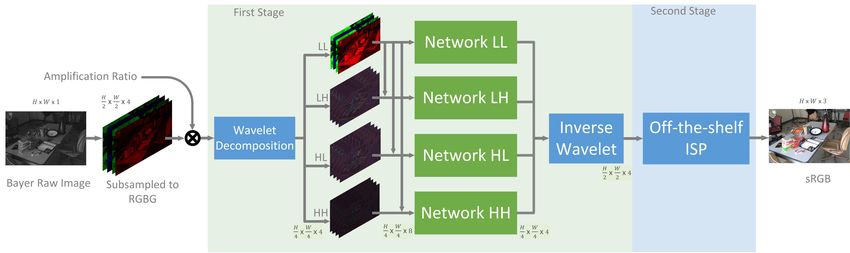
Outline
Background
Objective of the class
Prerequisite
Lecture Plan
Course Project
Q&A
Z. Li: ECE 5582 Computer Vision, 2021 p.2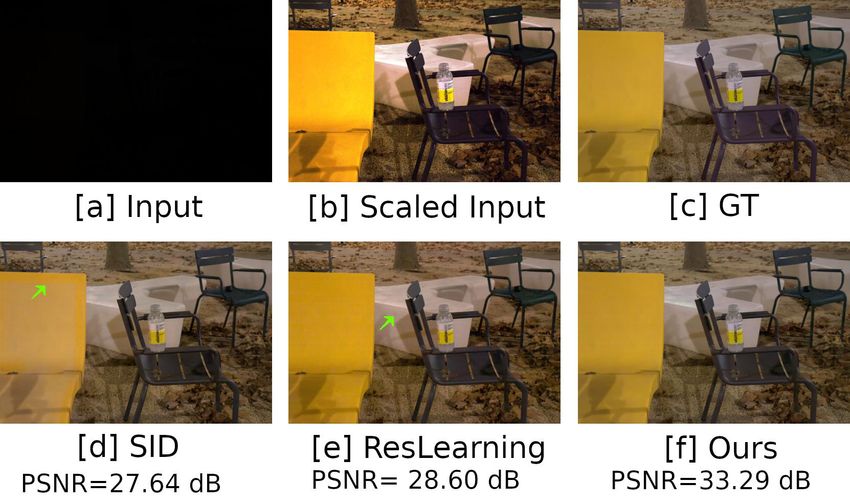
An image is worth a thousand words….
What we observe are pixels….
The story:
The train wreck at La Gare
Montparnasse, 1895
What computer can do these
days:
Figure out the building
The train
People walking around
Still long way to go to figure out
the semantics
Train crashes
It is an abnormal event (context)
La Gare Montparnasse, 1895
Z. Li: ECE 5582 Computer Vision, 2021 p.3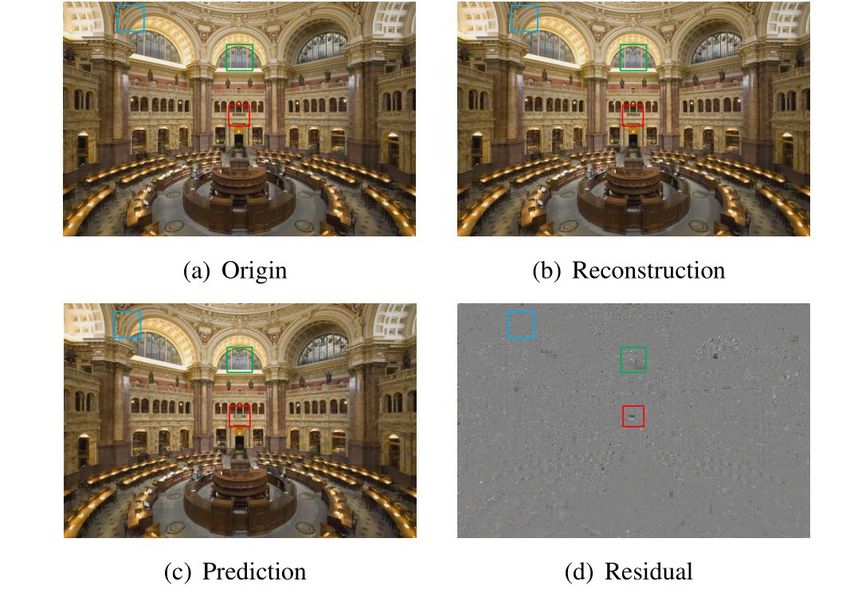
Advances in Image Sensors: pixels and voxels
Hyperspectral Image Sensor
I(x,y) in RD, D= 48, e.g.
3D/Depth Sensor: LiDAR,
Stereo Capture
I(x,y,z) in R
Panoramic Video Cameras
I( , ), , in [0, 2 ]
Lightfield Capture
Lenslet images
Z. Li: ECE 5582 Computer Vision, 2021 p.4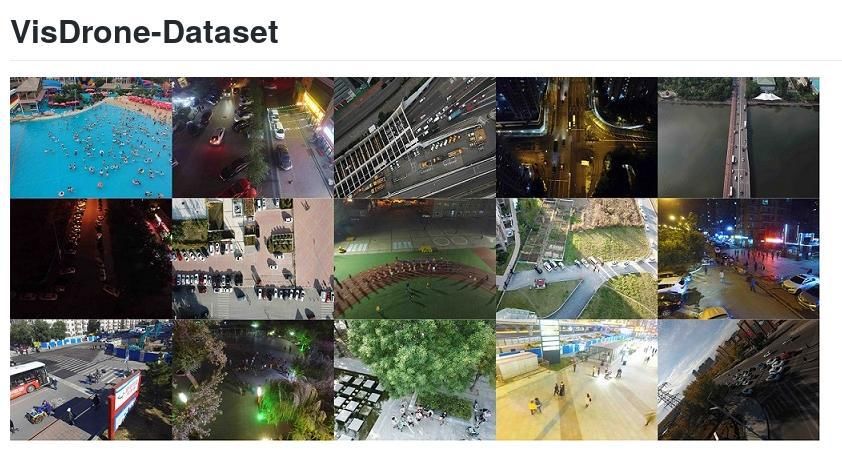
More than 25 years of Image Retrieval Research…
IEEE Computer 1995 Special Issue on Content Based Image Retrieval (CBIR)
Dr. Raghavan, Vijay
Distinguished Professor
Center for Adv. Computer
Studies
Univ of Louisiana at Lafayette
Z. Li: ECE 5582 Computer Vision, 2021 p.5
NSF Digital Librararies Initiative
Relevance Feedback in CBIR
Z. Li: ECE 5582 Computer Vision, 2021 p.6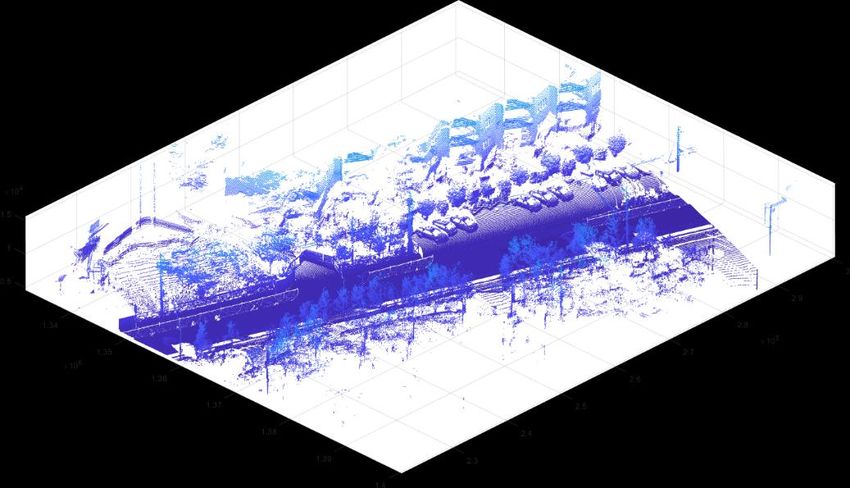
MPEG-7 Visual Features (Circa 2003)
Color, Shape, Texture Features for Image Search
Color Texture Shape Motion
1. Histogram • Texture Browsing • Contour Shape
• Scalable Color • Homogeneous • Region Shape
texture
• Color Structure
• Edge Histogram • Camera motion
• GOF/GOP
2. Dominant Color • Motion Trajectory
3. Color Layout • Parametric motion
• Motion Activity
Z. Li: ECE 5582 Computer Vision, 2021 p.7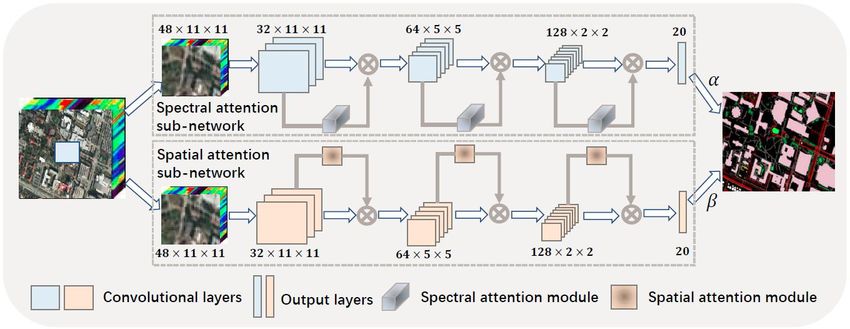
ImageNet - Deep Learning Classification (2013)
Tasks: Image Classification, Object Detection & Localization
2012: Fisher Vector (ECCV test of time award, 2020)
2013: Deep Learning ~ Conv Neural Networks (CNN) .e.g. AlexNet
2016: (Very) Deep Learning ~ Residual Neural Networks (ResNet),
K. He, MSRA/FAIR.
Z. Li: ECE 5582 Computer Vision, 2021 p.8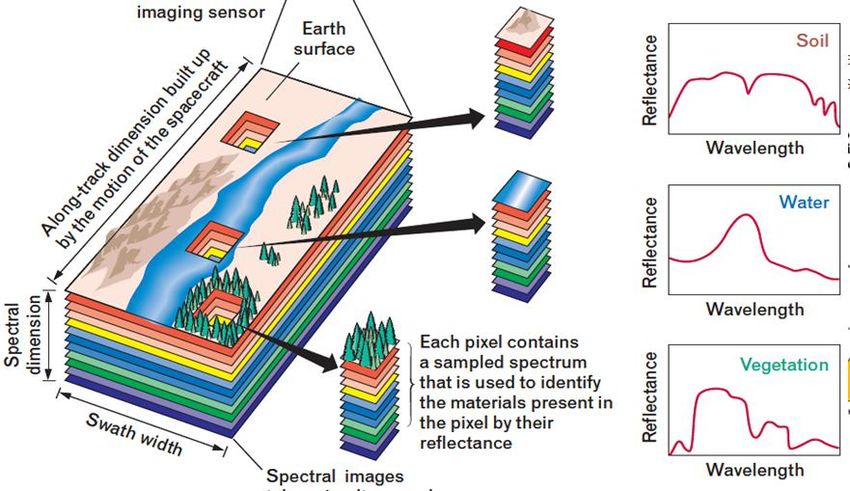
MPEG CDVS (2015) - Identification
Compact Descriptor for Visual Search (CDVS)
Object Re-Identification
Applications: Navigation, Query by Capture, AR/VR
Technology:
Key Point (SIFT) detection
Fisher Vector Aggregation and Hashing (for shortlisting)
SIFT compression
Performance
Verification: 90+% precision on 1% recall
Retrieval : mAP in 80~90%.
Z. Li: ECE 5582 Computer Vision, 2021 p.9
Point Cloud Detection and Segmentation
Key problems for auto driving cars
• Depth from Stereo Images
• Optical Flow
• Scene Flow
• 2D/3D data fusion and registration
• Image/3D features for SLAM
• Higher level syntactic object/event
recognition
Z. Li: ECE 5582 Computer Vision, 2021 p.10Image Recognition Pipeline - Handcrafted
Handcrafted Feature Based
Image Feature Feature
Classification
Formation Computing Aggregation
Color histogram Bow
Homography, Filtering, Edge VLAD
Color space Detection Fisher Vector
HoG, Harris Supervector
Detector, SIFT Knowledge
/Data Base
Z. Li: ECE 5582 Computer Vision, 2021 p.11Image Recognition Pipeline - Holistic/Deep Learning
Holistic Image Analysis
Direction Pixel Projection Subspace Models
w
h Y=AX
X in Rhxw
Convolutional Neural Networks
Z. Li: ECE 5582 Computer Vision, 2021 p.12Outline
Background
Objective of the class
Prerequisite
Lecture Plan
Course Project
Q&A
Z. Li: ECE 5582 Computer Vision, 2021 p.13Prerequisite & Text book
Prerequisite
For senior and graduate students in EE/CS
Good Matlab/C programming skills. Some Python is
also desirable.
Taken Signal & System, or Digital Signal Processing or
consent of the instructor
Will have different expectation/evaluation scheme for
MS/PhD and undergrad students
Textbook:
None required (saving $$) , will distribute relevant
chapters, papers, and notes.
Key References:
R. Szeliski, Computer Vision: Algorithms and
Applications, Springer, 2014. URL:
http://szeliski.org/Book/
J. E. Solem, Programming Computer Vision with
Python, O’Reilly, 2015. URL:
http://programmingcomputervision.com/downloads/Pro
grammingComputerVision_CCdraft.pdf
Z. Li: ECE 5582 Computer Vision, 2021 p.14Tentative Lecture Plan
Image Processing Basics HW 1:
Camera model and image formation Image Filtering and Features
Image filtering
Image Features for Retrieval
Color Features
HW 2:
Texture and Shape Features
Image Retrieval System
Basic Image Retrieval System and
Metrics
Object Identification in Image HW 3:
Key Point Detection Keypoint Feature Aggregation
Key Point Feature Description
Fisher Vector Aggregation
MPEG Mobile Visual Search
Technology and Standard HW 4:
Holistic Approach in Image Subspace method for face recog
Understanding
Subspace methods for face recognition:
Eigenface, Fisherface, Laplacianface. HW 5: deep learning
Deep Learning in Image Classification: methods in Aerieal Image
SoftMax and Triplet Loss networks
Classification
Z. Li: ECE 5582 Computer Vision, 2021 p.15Potential Course/MS thesis Project
Resources from last year:
https://sce.umkc.edu/faculty-
sites/lizhu/teaching/2019.spring.vision/mai
n-cv.html
Potential projects with 25% bonus points
Google Landmark Grand Challenge -
Identification/Recognition (CDVS baseline,
U of Surrey)
Aerial Image Classification with blur &
noise (AFRL project)
VisDrone - UAV vision and object
recognition (Pengfei)
FlatCam Lensless Camera Face Verification
Challenge (Salman)
Real world smart phone image super
resolution (NITRE2020)
Fast Face Detection in compressed video
(OpenCV)
Z. Li: ECE 5582 Computer Vision, 2021 p.16Working with NSF Center for Big Learning
Short Bio:
Research Interests:
Immersive visual communicaiton: light field, point
cloud and 360 video coding and low latency
streaming
Low Light, Res and Quality Image Understanding
What DL can do for compression (intra, ibc, sr, inter,
end2end)
Multimedia Computing & Communication Lab
What compression can do for DL (compression, Univ of Missouri, Kansas City
acceleration)
signal processing and image understanding visual communication mobile edge computing & communication
learning
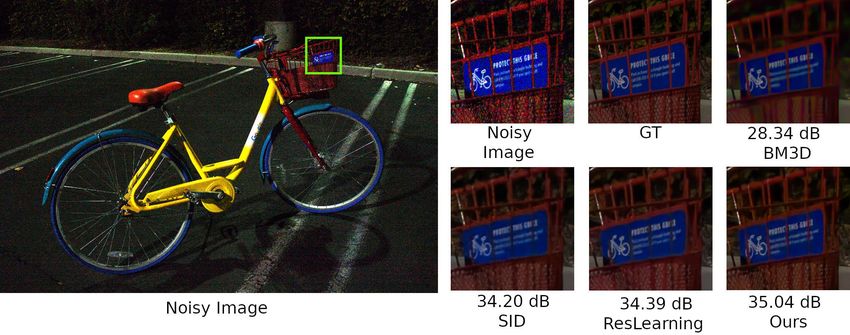
Z. Li: ECE 5582 Computer Vision, 2021 p.17Dark Image Enhancement
To design network to denoise the low-light image in Bayer
domain
To use wavelet decomposition to divide and conquer the
problem by learning sensor field sub images using separate
netowks
Figure 4: [a] Extreme low-light image from Sony a7S II exposed for 1/25 second . [b] 250x intensity scaling of image in [a]. [c] Ground truth image captured with 10 second
exposure time. [d] Output from SID[]. SID introduced some artifacts around the edge of the chair as shown by green arrow. [e] Output from ResLearning[]. The white region as
indicated by arrow in image is not properly reconstructed as white compared to that in ground truth image. [f] Our result.
Z. Li: ECE 5582 Computer Vision, 2021 p.18Decomposition based residual learning from sensor field
Decomposition of the target image via Wavelet
Adaptive loss functions for different subbands to exploit strong texture prior
Figure 12: Overview of our wavelet decomposition based network. The first stage learns the decomposed image and used the inverse wavelet to reconstruct the denoised 4 channel
image. The second stage uses the off-the-shelf ISP to enhances the image and converts into 3 channel sRGB image.
Z. Li: ECE 5582 Computer Vision, 2021 p.19Experimental Results Z. Li: ECE 5582 Computer Vision, 2021 p.20
Remote Sensing & Vision Highlights (AFOSR)
"Hyperspectral Image Classification with Attention Aided CNNs", IEEE Trans. on Geoscience &
Remote Sensing (T-GRS), 2020.
Attention CNN for Hyperspectral
Image Classification
• Introducing a dual stream
network architecture with separate
attention model for spatial and
spectral feature maps
• Achieving the SOTA
performance.
“PRINET: A Prior Driven Spectral Super-Resolution Network”, IEEE International Conf on
Multimedia & Expo (ICME), London, 2020.
PRINET: Spectral Super Resolution
• Super-resolve hyper-spectral info from RGB
inputs
• A dual loss network that learn a correlation
decomposed HSI images
• Achieving the new SOTA performance.
Z. Li, UMKC p.21Deep Guided Filtering Deblocking
The residual frame can be used as the guidance for the in-
loop filter of the reconstructed frame
Larger residuals indicate larger reconstruction errors
Z. Li: ECE 5582 Computer Vision, 2021 p.22Coding-prior-based in-loop filter
The residual frame is used as the additional input
Specific networks for reconstruction and residual
Residual Network: residual blocks
Reconstruction Network: down-sampling and up-sampling
Z. Li: ECE 5582 Computer Vision, 2021 p.23Experimental results
Comparison with VRCNN
Intra: 2.1% improvement Inter: 0.7% improvement
Z. Li: ECE 5582 Computer Vision, 2021 p.24Radar Signal Learning for Privacy Preserving Fall Detection
Use case:Seniors assisted living - Fall Detection
Approach:
77Ghz portable radar array sensor set up: horizontal and vertical
scanning, 4x2 Tx/Rx
Radar Signal Low Dimension Embedding + LSTM action
recognition
Time
GRB Images
from
Realsense
Range-
Angle
Reflection
Headmaps
Non-Falls
Falls
Figure 1. mmWave Radar based Fall Detector
Z. Li: ECE 5582 Computer Vision, 2021 p.25Neural network processing
Human activities are continuous dynamic patterns that can be recognized in
both spatial and temporal dependencies. We use successive radar reflection
heatmaps as the representative of human activities.
PCA is adopted as RLDE algorithm to project reflection heatmaps {H , V } to a
low-dimension subspace P as the elimination of spatial redundancies,
The proposed RNN with LSTM units utilizes the changes of motion at the temporal
domain. The softmax layer operates as a classifier. The cross-entropy function is
adopted as the objective function.
X +
Ct-1 Ct
it tanh
X
ot
ft X
σ σ tanh σ
Softmax
ht-1 ht
RLDE
St-1 St St+1
Ht-1 Vt-1 Ht Vt Ht+1 Vt+1
Figure 3. Architecture of RNN with LSTM units
Z. Li: ECE 5582 Computer Vision, 2021 p.26Extensive experiment
Multiple human activities detections: 7 categories of human
activities are labeled: Boxing, Falling, Jogging, Jump, Pick up,
Stand up & Walking.
Confusion Matrix of Multiple Human Activities
boxing 97.7% 2.3%
Average Inference Time Complexity:
falling 1.2% 69.4% 1.2% 1.2% 3.5% 15.3% 8.2%
RLDE + LSTM: 0.06042 sec
jogging 100.0%
3DCNN: 7.336 sec
True Class
jump 1.8% 96.4% 1.8%
pickup 5.9% 91.2% 2.9%
standup 32.1% 5.7% 49.1% 13.2%
walking 0.7% 99.3%
boxing falling jogging jump pickup standup walking
Predicted Class
Figure 4. Accuracy of Multiple Human Activities Detecting
Z. Li: ECE 5582 Computer Vision, 2021 p.27Internship Opportunities
Industry Partners
US Citizens - Send me your contact if interested
AFRL,
JAIC
Z. Li: ECE 5582 Computer Vision, 2021 p.28Course Outcome
Upon completion of the course you will be able to:
Understand the basic operations in image formation and filtering
Understand basic image features for retrieval: color, shape, texture
Understand key point features and aggregation in object
identification
Understand the holistic appearance modeling approach in image
understanding
Understand the latest image analysis and understanding techniques
like deep learning .
Can apply the knowledge an algorithms to solve real world image
understanding and retrieval problems
Well prepared for conducting advanced research and pursing
career/PhD in this topic area. (PhD qualify required course)
Z. Li: ECE 5582 Computer Vision, 2021 p.29Grading (total 100pts + bonus)
5 Homeworks (50pts)
Image Filtering and Basic Features
Image Retrieval System and Performance Metrics
Key Point Feature and Fisher Vector Aggregation in Object
Identification
Subspace Models in Image Understanding
Deep Learning Aggregation in Classification
2 Quizzes (20pts) : relax, quiz is also on me, to see where you
guys stand
Quiz-1: Part I and II
Quiz-2: Part III and IV
Project (30pts)
Original work leads to publication, discuss with me by the mid of
October. (up to 15 bonus pts)
Regular project: assign papers to read, implement certain aspect, and
do a presentation.
Z. Li: ECE 5582 Computer Vision, 2021 p.30Logistics
Office Hour:
Thu: 2:30-4:30pm on zoom
Or by appointment
TA:
Rijun Liao
Lab Sessions are planned to cover certain software tools aspects.
Office Hour: TBA
Course Resources:
Box folder with slides, lecture video, references, data set, and
software: (Password: ECE5582CV)
https://umkc.box.com/s/zwj3nxrjbh1qzjctp7qhoru044grv5zf
Main communication: via class emails, homeworks submission via
canvas, zoom meetings/office hours
Additional reference, software, and data set will be announced.
Z. Li: ECE 5582 Computer Vision, 2021 p.31Q&A
Q&A
Z. Li: ECE 5582 Computer Vision, 2021 p.32You can also read

















































