Horizon 2020 Teaming - Call 2: November 15, 2016 ACROSS Centre of Excellence for Autonomous and Cooperative Robotic Systems
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Horizon 2020 − Teaming
Call 2: November 15, 2016
ACROSS
Centre of Excellence for Autonomous
and Cooperative Robotic Systems
Ivan Petrović
12 / 05 / 2017
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017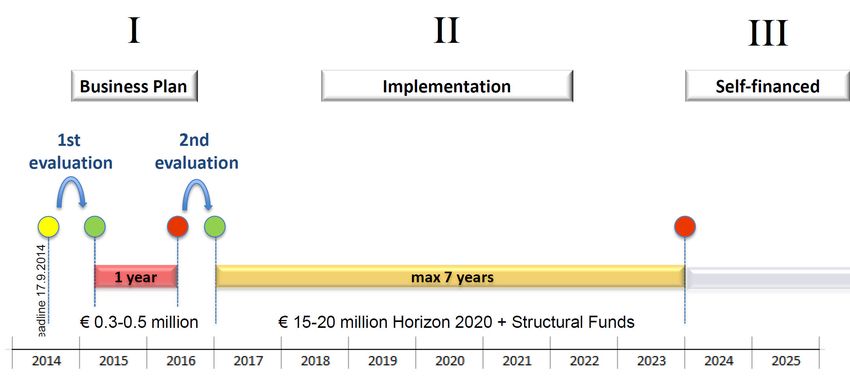
Outline
Teaming – basic info
ACROSS CoE – objectives and background
ACROSS CoE – the concept and S&I strategy
ACROSS Phase I
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 1/32
Teaming – basic info ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017
Teaming in Horizon 2020 Collaboration of high and low performing MS/AS ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 3/32
Teaming main objective
White Paper on Teaming for excellence -
Building high quality research across Europe
through partnership:
„Teaming is not about incremental development, it is
designed to provide a high speed lift to excellence,
through highly focused and intensive support to create
research environments and new centres of excellence”.
https://www.mpg.de/6877962/WP_Teaming_for_excell
ence.pdf
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 4/32
Principles of Teaming ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 5/32
1.09.2017.
Timeline
1.06. 2019.
D 15.11.2016.
0.3 - 0.4 up to €15
2016 2017 2018 2019 2020 2021 2022 2023 2024 2025 2026 2027
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 6/32ACROSS CoE – objectives and
background
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017ACROSS Long-term objectives
The overall objective:
to create the Centre of Excellence for Autonomous
and Cooperative Robotic Systems (ACROSS) in
Croatia which will significantly:
• reinforce scientific capacity and innovation performances in
autonomous and cooperative robotic systems (Objective 1)
• increase scientific visibility and reputation at an international
level (Objective 2)
• improve responses to the socioeconomic needs of Croatia
(Objective 3)
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 8/32ACROSS Thematic Area
“Robotics Technology will become dominant in the
coming decade. It will influence every aspect of
work and home. Robotics has the potential to
transform lives and work practices, raise efficiency
and safety levels, provide enhanced levels of service
and create jobs. Its impact will grow over time as
Partners will the interaction between robots and people.”
Croatian S3 Competences
Cited from: Strategic Research Agenda (SRA) for
Robotics in Europe 2014-2020
Economical
Impact
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 9/32Alignment with the Croatian S3
TPAs Energy and
Health and quality Transport and Food and bio
sustainable Security
of life mobility economy
CCTs environment
(i) Satellite or drone-based
(i) Robots, assistive
(i) More sustainable wide area surveillance in (i) Advanced
techs. and
and green vehicles and air, land and water Manufacturing
processes.
greener combustion (ii) Unmanned vehicle Technologies -
(ii) Robots
KETs - based vehicle control processes for the cost-
supporting
propulsion (iii) Tracking of vehicles efficient conversion of
professional care
(ii) E-propulsion and and persons / fleet various biomasses to
and robot assistive
widespread E-mobility management in demined biofuels
techs.
areas
(i) Navigation,
guidance and control
(i) Use of robotics (i) Robotic systems for
(i) Robot technologies as of vessels
in medicine (i) Tracking of vehicles and growing food and
systems for autonomic (ii) Autonomous
(ii) Embedded persons (devices) on the control in aquaculture
supervision of energy unmanned vessels
computer demined areas and in the (ii) Drones and
infrastructures (underwater and
ICT automation and vicinity of mine suspected remotely controlled
(ii) Embedded computer surface)
control areas systems for forestry,
automation and control (ii) Embedded
(iii) Computer (ii) Computer vision and nature protection and
(iii) Computer vision and computer automation
vision and machine machine learning environmental
machine learning and control
learning monitoring
(iii) Computer vision
and machine learning
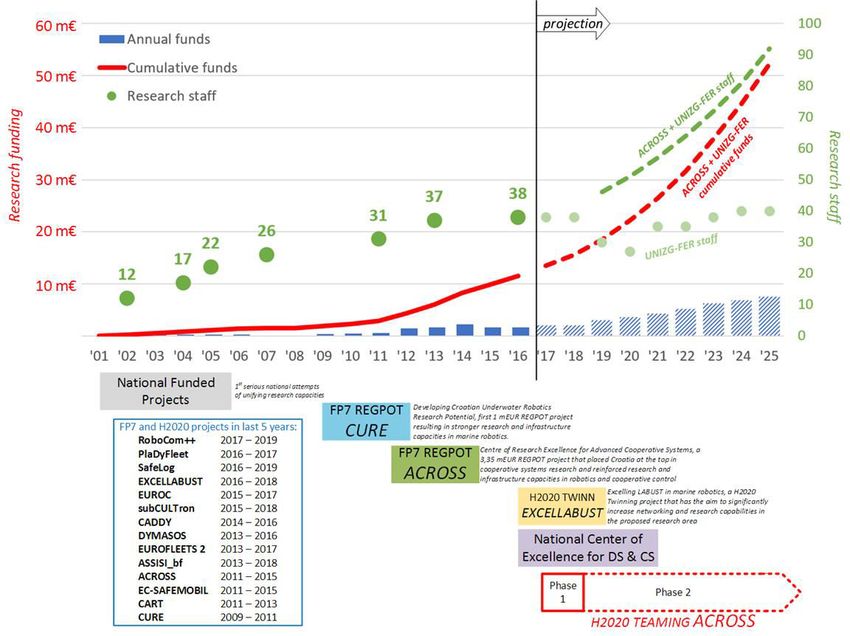
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 10/32Partner Competences:
UNIZG-FER
LAMOR: Laboratory for autonomous systems and mobile robotics,
http://lamor.fer.hr/
LARICS: Laboratory for robotics and intelligent control systems,
http://larics.rasip.fer.hr/
LABUST: Laboratory for underwater systems and technologies,
http://labust.fer.hr/
ACT: Advanced Control Systems Group, http://act.rasip.fer.hr/
UNIZG-FER is the only key player
having potential to substantially reinforce
robotics in Croatia
(about 50 people; cca 40 funded from the projects)
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 11/32Partner Competences:
UNIZG-FER
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 12/32Partner Competences:
KTH
The QS World University Ranking:
among top 16 technical universities world-wide and
among top 8 technical universities in Europe.
Strong surrounding innovation eco-system:
incubators, investors, networks of entrepreneurs/team
members and company contacts.
E.g., in 2015:
• out of the 273 new ideas that entered the process, 38 companies
were formed, 31 deals with customers were closed and 15
companies were incubated.
After Silicon Valley, Stockholm produces the highest
number of start-ups valued at over $1 billion per capita.
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 13/32Partner Competences:
KTH
CAS: Centre for Autonomous Systems,
https://www.kth.se/en/csc/forskning/cas - Danica
Kragić, Patric Jensfelt, Dimos V. Dimarogonas
CNA: Centre for Naval Architecture,
https://www.ave.kth.se/avd/naval/ - Jakob Kuttenkeuler,
Ivan Stenius
KTH Innovation, https://www.kth.se/en/innovation -
Lisa Ericsson
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 14/32Partner Competences:
ICENT
A non-profit institution whose function is to enable and
accelerate efficient commercialization of new technologies in
areas critical for the development of Croatian economy.
We expect that the double helix constellation of ICENT and
KTH Innovation will form a synergy spurring a much
needed innovation cycle through ACROSS.
ICENT is currently coordinating a small H2020 project called
Feasibility study for Croatian robotics digital innovation hub
(CROBOHUB).
A new H2020 project called Logistics for manufacturing SMEs
(L4MS) has been just accepted – goal: to establish a
Competence Centre for robotics in logistic applications
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 15/32Economic impact
McKinsey Global Institute – economic impact
prediction by 2025.:
Advanced robotics - $1.7 - $4.5 trillion annually
Autonomous and near-autonomous vehicles - $200
billion to $1.9 trillion annually
World Economic Forum:
Next-generation robotics – rolling away from the
production line and
Autonomous vehicles
are among top 10 emerging technologies
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 16/32Economic impact
European position in robotics
32% world market of industrial robotics
63% world market of service robotics
euRobotics AISBL and EC has formed SPARC, a
contractual Public-Private partnership
Croatian positions in robotics
Industry:
• > 800 registered high-tech companies in Croatia
• But, only few of them produce robots (e.g. DOK-ING, Inteco
Robotics, Rock-NDT, Inetec and HSTEC)
Research:
• UNIZG-FER (>40 people), all others together < 20 people
• UNIZG-FER is the only member of euRobotics AISBL from
Croatia; and only has EU projects in robotics
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 17/32ACROSS CoE – the concept and S&I
strategy
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017The Concept of the ACROSS CoE
ACROSS CoE is an autonomous, well-identified entity,
managed in partnership of UNIZG-FER, KTH and ICENT,
which has:
full autonomy in decision making,
critical mass of excellent researchers,
own premises and research infrastructure (will be provided by the Croatian government),
own, well defined, long-term science and innovation strategy,
and which will:
be at the forefront of research, development and innovation (RDI) of novel methodologies and advanced
engineering approaches for autonomous and cooperative robotic systems,
strive for high quality research in targeted research domains, in line with international standards of
excellence,
direct its research focus towards areas that can serve the technological needs as identified by the
Croatian Smart Specialisation Strategy, and encourage the development and use of new high-tech
products by businesses,
be rooted in the Croatian research and innovation landscape, yet aiming for recognized international
excellence,
create true impact on Croatian and regional economy through integration or connection with regional
and national innovation centres and business clusters,
by implementing a comprehensive set of strategic measures.
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 19/32KTH
Scientific and UNIZG-FER recent achievements ACROSS Scientific and Innovation Strategy
Future emerging research
1. Multi-media autonomous vehicles
innovation strategy of 1. Payload variable autonomous marine 2. Bio-inspired acoustic environment sensing
3. Heavy load aerial transportation systems
Better vehicles for persistent ocean monitoring
2. Underwater vehicles for diver-robot for autonomous redeployment of unmanned
machines interaction vehicles
the ACROSS CoE
3. Innovative robotic sensor hubs for
intelligent ocean monitoring;
Technology 4. Autonomous quadrotor with moving Innovation
masses for fine positioning and navigation 1. Low-cost auton. marine surface platform
cluster:
5. Rough terrain remotely operated ground 2. Gasoline powered autonomous aerial
Mechatronics vehicles for special purposes vehicle with high payload capabilities
Strategic measures:
... 3. Remotely operated firefighting rough
LONG-TERM SCIENTIFIC EXCELLENCE AND TECHNOLOGY TRANSFER (sustainability)
terrain vehicle
4. Autonom. fleet for 3D modelling of sites
Objective 1: Better
actions 1. Single range navigation algorithms
Future emerging
Innovation
research
1. Emergent behaviour in few smart systems
2. Intention aware autonomous navigation
•
2. Multisensor fusion for enhanced
MID-TERM TECHNOLOGY TRANSFER (Teaming Phase 2)
based on the theory of mind
Inspiring environment and underwater navigation
3. Moving object detection and tracking
3. Cloud-based learning and emergent
behaviour synthesis
• awareness 4. Active and dynamic SLAM based on cloud
Necessary critical mass of researchers information exchange
5. Navigation of autonomous robots in
4. Robot-assisted rehabilitation;
• presence of uncertainty Innovation
Necessary infrastructure Technology
cluster:
6. Precise markerless localization and
navigation in warehouse environments;
1. Real-time dynamic object dense detection
and tracking
•
2. Markerless localization system for precise
Integration of strong theoretical Perception
Navigation
localization in indoor environments
3. 2D camera based precise navigation in 3D
Cognition
research in practical settings
Future emerging research
Objective 2: Better 1. Human-robot interaction in the
1. Contextual human-robot collaboration
2. Underwater exoskeletons and space
• Establishment of a large
underwater environment simulation systems
2. Safe human-robot cohabitation in 3. Collaborative human-robot manufacturing
interaction reconfigurable warehouses
3. Dynamic management of physically
collaboration network Technology
cluster:
coupled systems of systems
3. Aerial-ground system for interaction with Innovation
• Integration in the ERA
1. Underwater diver navigation system
the environment through cooperative mobile 2. Affordable certified system for automatic
Human robot manipulation robot stopping in case of human presence
interaction ...
• Increased industrial connectivity
3. Human machine interfaces for
simultaneous control of multiple unmanned
vehicles
Objective 3: Future emerging research
1. Bioinsp. small scale underwater systems
• Long-term sustainability
1. Heterogeneous marine swarms for 2. Autonomous navigation of robots and
distributed ocean measurement vehicles in unstructured and highly dynamic
Better 2. Driver assistance system for automotive environments with reduced or no human
• IPR Protection
systems and light-rail vehicles intervention
3. Long-term self-sustainable intell. swarms
3. System for autonomous navigation in
dynamic environments
• Promotion of knowledge-based
Technology 4. Multivehicle coordination in warehouse
cluster: Innovation
environments 1. Collision alert for road & light-rail vehicles
System 5. Reactive planning in aerial-ground robotic 2. Syst. for auto. thermal building mapping
economy in Croatia development systems
6. Trust-based swarm behaviours
3. Auton. insp. of rotor blades with a UAV
4. Auton. variable-buoyancy marine sensors
• Facilitate the initiation of start-up
... 5. Easily deployable coord. SW for
autonomous vehicles in warehouses
companies
ICENT
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 20/32ACROSS Phase I ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017
ACROSS Work Programme
Months 1 2 3 4 5 6 7 8 9 10 11 12
Tasks
WP1: Management, coordination and dissemination
T1.1 Overall project management and coordination
T1.2 Progress and cost reporting
T1.3 Organization of ACROSS meetings and workshops D1.1 D1.2 D1.3 D1.4
T1.4 Dissemination and communication D1.5 D1.6 D1.7
WP2: ACROSS Ecosystem assessment
T2.1 State-of-the art and future perspective of the domain
T2.2 Assessment of the current state of the project partners s
T2.3 Detailed analysis of the SWOT for the ACROSS CoE D2.1
T2.4 Assessment of the innovation landscape in Croatia
T2.5 Analysis and best practices consolidation
T2.6 Identification of infrastructure investments and capacity building needs
WP3: ACROSS Roadmaps for achieving excellence
T3.1 Roadmap for long-term scientific and innovation excellence
T3.2 Roadmap for operational and organizational excellence
T3.3 Roadmap for long-term sustainability and financial autonomy
T3.4 Roadmap for long-term contribution to socioeconomic development of Croatia D3.1
T3.5 Roadmap for strategic positioning into the innovation landscape in Croatia
T3.6 Roadmap for infrastructure development and capacity building
T3.7 Roadmap for long-term partnership
WP 4: ACROSS Business Plan D4.1
WP 5: Ethics requirements D5.1&D5.2
MS1 MS2 MS3 MS4
SoWS WS1 WS2 WS3
Assessment period Roadmapping period BP design period
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017 22/32Horizon 2020 − Teaming
Call 2: November 15, 2016
ACROSS
Centre of Excellence for Autonomous
and Cooperative Robotic Systems
Ivan Petrović
12 / 05 / 2017
ACROSS Teaming - presentation, Info day SEWP, Zagreb, 16/05/2017You can also read