AIM/PALS AIM Industry Days @ ESTEC - IRF, Uppsala & Kiruna ÅAC Microtec AB, Uppsala DLR, Bremen - Indico at ESA / ESTEC (Indico)
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
AIM/PALS AIM Industry Days @ ESTEC IRF, Uppsala & Kiruna ICE-IEEC, Barcelona ÅAC Microtec AB, Uppsala KTH, Stockholm DLR, Bremen Emil Vinterhav emil.vinterhav@aacmicrotec.com
Project Team Science IRF, Uppsala & Kiruna ICE-IEEC, Barcelona KTH, Stockholm System Analysis and Design ÅAC Microtec AB, Uppsala Mission Analysis DLR, Bremen

PALS
Hugin & Munin
PALS = Payload of Advanced Little
Satellites
Hugin and Munin are companions to
Odin, the Norse god of wisdom
Hugin (“thought”, “intuition”)
Munin (“memory”, “common sense”)
Hugin and Munin are ravens that fly over
the world collecting information for Odin so
that he can know all the secrets of the
universe and create order from truth.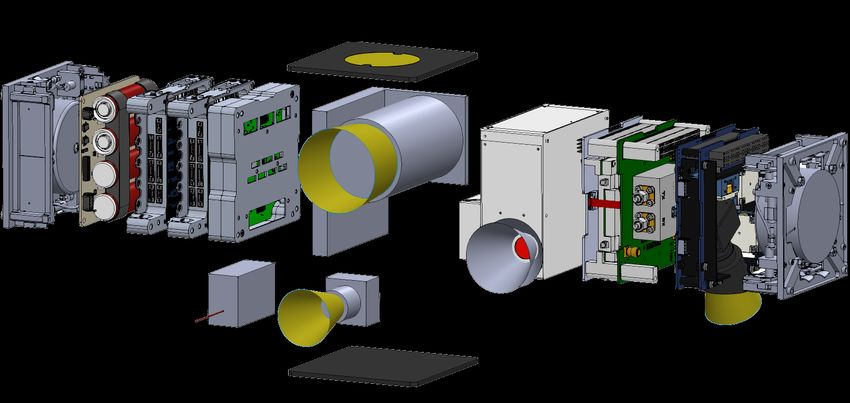
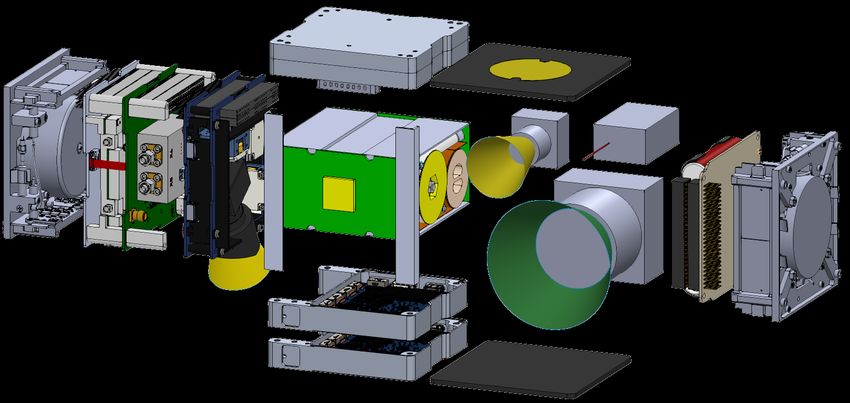
Payload Hugin: NAC: Narrow Angle Camera VCA: Volatile Composition Analyser Munin: VES: Video Emmision Spectrometer MAG: Fluxgate Magnetormeter (2m boom) Meeting and supporting AIM to meet primary and secondary science objectives
Possible Orbits inside the
Binary System
L4/L5 area are stable equilibrium points
L1/L2 are instable equilibrium points and can be
used for short transfers or flybys to the moon or as
operations points where active control is necessary
Close proximity operations to Didymoon (500 m) is
not possible with standard keplerian orbits (like polar
ones), to much perturbation from binary system and
gravity field of the primary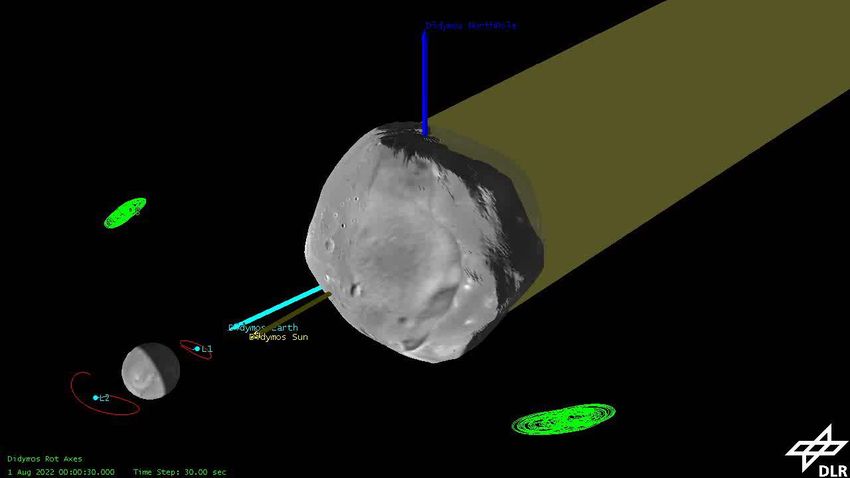
Possible Orbits inside the
Binary System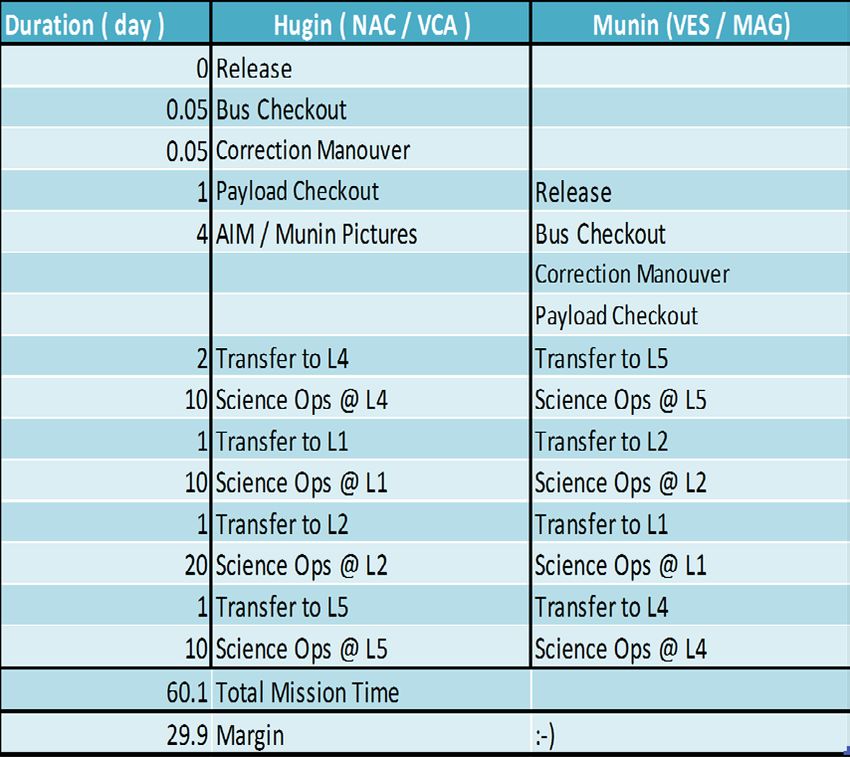
Mission Scenario
Detailed Mission Scenario
Phase Activity Duration Platform Payload
1 Commissioning, 4 Commissioning, In orbit test
Detumbling, Delta V correction,
2 Approach 1 Approach from >10 km, orbit insertion Science
L4/L5 Operations 10 days station keeping Science
3 Transfer to L1/L2 1 day Manoeuvering
L1/L2 Operations 10 days Station keeping Science
4 Impact 1 day Forced motion transfer to and station keeping
5 L1/L2 Operations 20 days station keeping Science
6 Transfer to L4/L5 1 day Manoeuvering
L4/L5 Operations 10 days station keeping Science
Total 58 days ~30 days margin for extended mission
Requirements & Constraints User requirements Mission Analysis requirements 1U Payload / PALS Cubesat Orbit navigation and Magnetically clean (
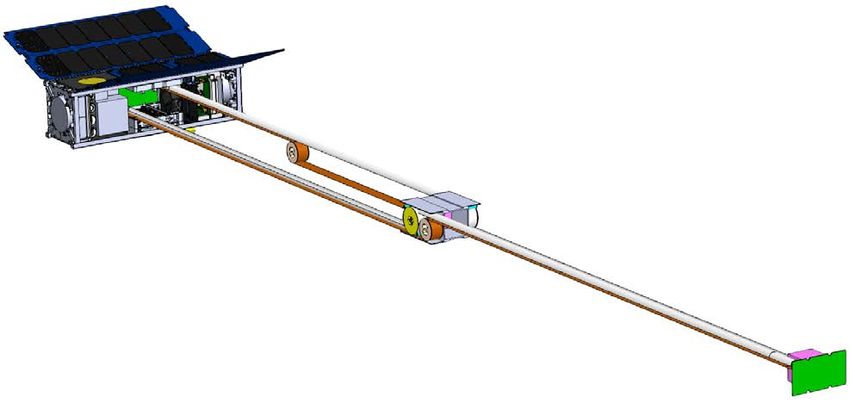
PALS spacecraft (1/3) Design philosophy COTS preferred (some modifications necessary) Aim for >TRL 6 Single string equipment, redundancy on logical level (TMR) TID tolerant to 20 kRad Structure & Mechanisms 2x 3U Cubesats named Hugin and Munin (less than 4,5 kg each) identical equipment, differ in accomodation of equipment and thruster orientation 4 segments of deployable solar panels 2m boom for MAG on Munin
PALS spacecraft (2/3)
3-axis attitude stabilisation and 3 position nav and control
startrackers and reaction wheels
Optical sensors, laser altimeter, (s-band ranging) and Cold Gas thrusters
Propulsion
16 cold gas thrusters in two modules
0.01 - 1mN @ 20 Hz
Total ~12,5 m/s delta V
Data handling
2x OBC, (OBDH and position navigation) FPGA, TMR, RTEMS, SpW
1x combined TM&TC and MM, 16 GB MM, EDAC , RTEMS, SpW, CCSDS, PUS
stacks
PUS for command distributuin, SpW for onboard data bus, CCSDS for ISL (TBC)
Thumbnail data download selection for optimal use of link budgetPALS spacecraft (2/3) Communication ESA s-band ISL with ranging capability 2x patch antennae giving full sphere coverage Power 11W Average, 15 W maximum 4x deployable solar panels and power storage for eclipse Thermal Surface treatment for hot side, and MLI for cold side Heaters (TBD)
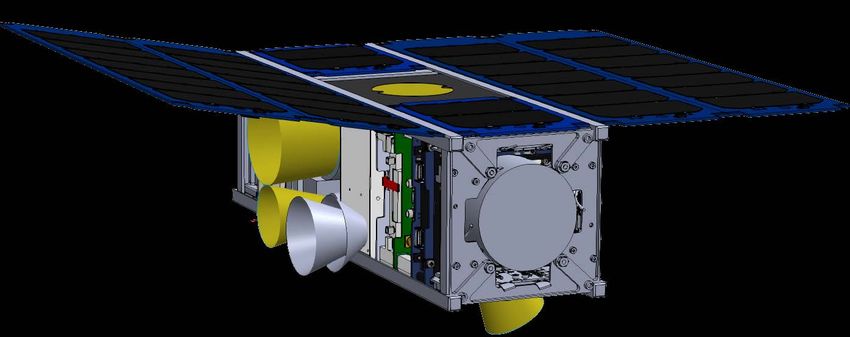
PALS:Hugin
x
z
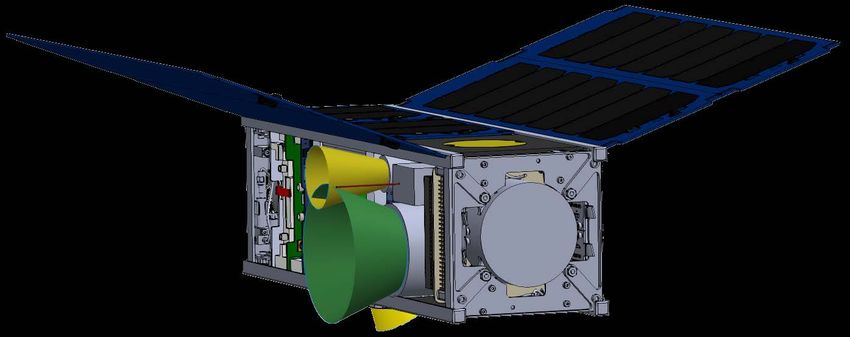
yPALS:Munin
x
z
yPALS:Hugin
PALS:Munin
Schedule
Team consolidation
IRF, KTH, ICE-IEEC, DLR, ÅAC Mictorec
Science definition
Science objectives
Instrument suite
Mission Analysis
Identification of constraints and possibilities
System definition uin CEF
Designing platform to support and payload requirements and science objectives
System Consolidation
Adress outstanding issues
Preparation of system implementation plan
Plan from here to delivery of systemChallenges & open issues AOCS with 2m boom Autonomy Position navigation and guidance Cubesat project in ESA inter-planetary mission context
Summary Strong project team Strong heritage from deep space and asteroid science and missions String heritage of deep space spacecraft operations Strong heritage of space system design Strong science case Supporting AIM to meet primary and secondary science objectives Advanced mission Highly autonomous High peformance AOCS Advancing the state of the art for Cubesats Strong technology State of the art payload with heritage from large scale missions Platform is COTS and TRL > 6
Thank you for your attention
Emil Vinterhav
emil.vinterhav@aacmicrotec.comYou can also read