Lecture 4: RL from Deep Learning Perspectives - EPFL Summer School on Data Science, Optimization and Operations Research August 15-20, 2021
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
EPFL Summer School on Data Science, Optimization and Operations Research August 15-20, 2021 Lecture 4: RL from Deep Learning Perspectives Niao He, D-INFK, ETH Zurich
Recap: Reinforcement Learning Approaches • Value-based RL Actor ◦ Estimate the optimal value function ∗ ( , ) Value-based Critic Policy-based ◦ Example: Q-learning • Policy-based RL ◦ Search directly the optimal policy ∗ (⋅ | ) ◦ Example: Policy Gradient Method Model-based • Model-based RL ◦ First estimate the model , and then do planning 2
Outline of Lecture Series Focus: Provably convergent “deep” RL methods Lecture 1 Introduction to RL RL from Control Perspectives Lecture 2 - Value-based RL o RL with nonlinear function approximation Lecture 3 RL from Optimization Perspectives o RL with neural network approximation - Policy-based RL RL from Deep Learning Perspectives Lecture 4 - Deep RL Lecture 5 RL from Game Perspectives 3
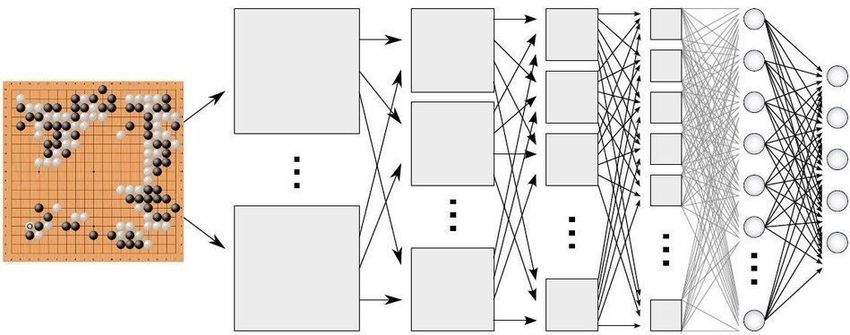
The Grand Challenge Chess: 10$%& Go: 3"#$ • Large state space, policy space State Action " Learn parameter " , ∈ ! ( ≪ | |) " | " , # , Using neural network approximation seems a must. AI = RL + DL? 4
Neural Networks • Nested composition of (learnable) linear transformation with (fixed) nonlinear activation functions !m A single-hidden-layer neural network f (x; w, α) = αi σ(wiT x) i=1 $,$ $ Activation function ⋅ : $ • Identity: = % • Sigmoid: = $ $'()*(,-) 0 • Tanh: = tanh • Rectified linear unit: = max(0, ) 1 1,0 Input layer hidden layer output ( nodes) 5
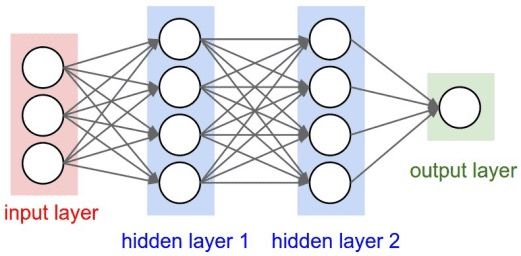
Deep Neural Networks • More hidden layers, different activation functions, more general graph structure …. Feed forward network Convolutional network Residual network Recurrent network … 6

Representation Power - why neural networks? Shallow networks are universal Benefits of depth approximators • Any continuous function on bounded domain • A deep network cannot be approximated by a can be approximated arbitrarily well by a one- reasonably-sized shallow network. hidden layer network with nonconstant and increasing continuous activation function. • There exists ReLU networks with ( ) nodes in 2 [Cybenko, 1989; Hornik et al.,1989; Barron, 1993] hidden layers which cannot be approximated by 1- hidden-layer networks with less than 2! nodes. [Eldan and Shamir, 2015] • Number of neurons can be large. • There exists a function with " layers and width 2 which requires width 2# to approximate with ( ) layers. [Telgarsky 2015,2016] 7
Training with Neural Networks • Gradient vanishing or exploding ReLU activation, gradient clipping • Overfitting regularization techniques (dropout, early stopping, etc.) • Nonconvexity noisy gradient • Ill-conditioning adaptive gradient methods (Adam, AdaGrad, RMSprop, etc.)

Deep Reinforcement Learning • Using (deep) neural networks to represent ◦ Value function ◦ Policy ◦ Model Actor Value-based Critic Policy-based Model-based 9
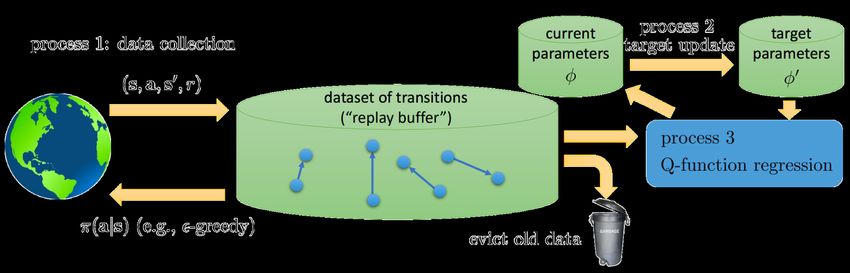
Deep Value-based and Actor-critic RL • Deep Q-Learning Q∗ (s, a) ≈ Q(s, a; w) ! " " " − 2 min L(w) := E(s,a,s! ,r)∼D (r + γ max ! Q(s , a ; w ) − Q(s, a; w)) w a • Stabilizing training: (prioritized) experience replay, target network, double learning, dueling network. Figure source: EE-618 at EPFL 10
The Deadly Triad? Network capacity Target networks Overestimation Of Of g f-p g pi n Multi-step returns f-p pi n oli oli p p ra cy ra cy Prioritization st st D ot D at ot at Bo a Bo a Function Approximation Function Approximation Q-learning with function DQN successfully learnt to play Theory Practice approximation could diverge. many Atari 2600 games. [Barto & Sutton, 2018] [van Hasselt et al, 2018] 11
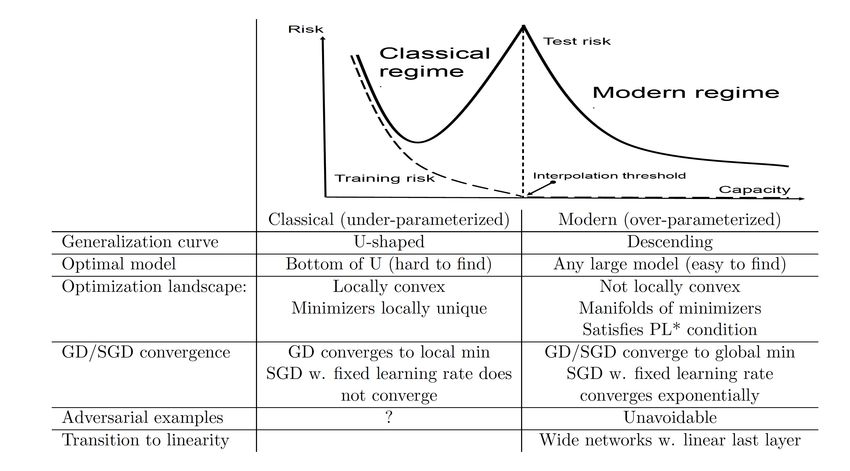
Wisdom from modern deep learning theory Mikhail Belkin. Fit without fear: remarkable mathematical phenomena of deep learning through the prism of Interpolation, 2021. 12
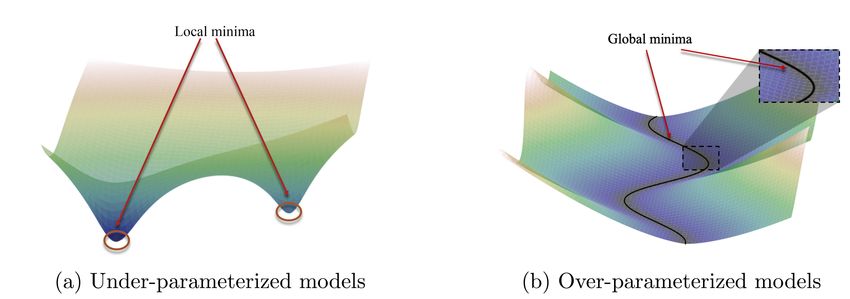
The optimization landscape Extensive work: Jacot et al. 2018; Li and Liang 2018; Du et al. 2018; Allen-Zhu et al. 2018; Oymak and Soltanolkotabi 2019; Zou et al. 2018; Chizat and Bach 2019; Ji and Telgarsky 2019a; Z. Chen et al. 2019; Arora et al. 2019; Cao and Gu 2020; …… Liu et al. Loss landscapes and optimization in over-parameterized non-linear systems and neural networks, 2021. 13
The neural tangent kernel (NTK) • Supervised learning: find a model parameter that fits the training data f (xi ; w∗ ) ≈ yi , i = 1, . . . , n 1! n minm L(w) := (f (xi ; w) − yi )2 w∈R 2 i=1 • Neural tangent kernel: Kij (w) = !∇w f (xi ; w), ∇w f (xj ; w)# Kij (w0 ) = Ew0 ∼N (0,Im ) !∇w f (xi ; w0 ), ∇w f (xj ; w0 )# • Kernel matrix: " ≽ 0 if is sufficiently large 14
Key insight behind the scene • Gradient flow: dw(t) = −∇L(w(t)) dt & ≽ &, for random & and large u(t) = f (w(t); x) − y = ( ) du(t) 1 = −K(w(t))u(t) 123 − 123 & = , dt for ∈ • PL* condition ( ) ≻ !∇L(w)!2 = (f (w; x) − y)T K(w)(f (w; x) − y) ≥ 2 · λmin (K(w)) · L(w) / converges to global optima 15
Supervised Learning vs. RL • Common features: learning from experience and generalize ◦ SL: given $ , $ $%&,…,) , learn best in hypothesis class ◦ RL: given $ , $ , $ $%&,…,) , learn best ( , ) or ∗ = arg min ( , ). + • Distinguishing features of RL: ◦ Lack of supervisor, only a reward signal ◦ Delayed feedback ◦ Non-i.i.d. data ◦ Difficulty with data reuse 16
Notation Recap MDP ( , , , , , ) State value function: State-action value function: Optimal value function: Optimal policy: Bellman equation: V π (s) = Ea∼π(s) R(s, a) + γEs! ∼P (·|s,a) V π (s" ) ! " Bellman optimality: Policy gradient: State visitation distribution: 17
TD Learning with Neural Network Approximation • Value function approximation: = ∈ = hidden layer input layer 1 , . output > ; , = E $ $- $%& > ( ; , ) • Symmetric Initialization: $ = − $.,/" ∼ −1,1 , $ 0 = $.,/" 0 ∼ (0, ! ) • Neural TD Learning: + 1 = ( ) + / / + >/ /.& − >/ / ∇0 >/ ( / ) 18
Optimization Perspective Minimizing mean-square Bellman error (MSBE): ) min $∼& 8 ; , − + $4 |$ 8 ( ; , # • TD Learning can be viewed as a stochastic semi-gradient method. • With neural network approximation, the MSBE objective becomes non-convex. • Approximation error between 8 ; , and true value function ( ). Goal: Can we achieve >- − ≤ ? • Sample complexity (required number of samples)? • Network complexity (required number of neurons)? 19
Existing Theory • TD Learning with linear function approximation ◦ Finite-time analysis of TD with projection: [Bhandari et al., 2019] ◦ Finite-time analysis of TD without projection: [Srikant & Ying, 2019] ◦ Finite-time analysis under i.i.d. setting: [Dalal et al., 2018], [Lakshminarayanan & Szepesvári, 2018] • (Stochastic) Gradient Descent with two-layer overparametrized neural network ◦ Infinite-width limit ( → ∞): [Jacot et al., 2018], [Chizat et al., 2019] ◦ GD with polynomial width: [Du et al., 2018] , [Oymak and Soltanolkotabi, 2019], [Arora et al., 2019] ◦ SGD with polylogarithmic width (classification only): [Ji & Telgarsky, 2020] Key Challenges: • Massive overparameterization (poly in | |) is not suitable for TD Learning • Drift of the network parameter || − 0 || 20
Neural Tangent Kernel
* /
• Recall 8 ; , = ∑+ ,.
+ ,-* ,
1 ,
> ; , ≈ > ; 0 , + E $ $- 0 ≥ 0 - [ $ − $ (0)]
$%&
1 ,
> ; , ≈ E $ $- 0 ≥ 0 - $
$%&
• Neural Tangent Kernel:
, = 05∼1(", 46) [ ". ≥ 0 ". ≥ 0 . ]
◦ The NTK is a universal kernel.
◦ The corresponding RKHS is dense in the continuous function space defined on a compact set.
• Assumption: = . " ⋅ ". ≥ 0 , where sup ( ) ) ≤ ̅ < ∞.
0
21Neural TD Learning with Regularization Algorithm 1: Projection-Free NTD Algorithm 2: Max-Norm NTD + 1 = + ⋅ / $ + 1 = Proj2 0! 3 ,4 [ $ + ⋅ /$ ] Regularization: Early stopping Regularization: Max-norm = ( ,̅ , ) || $ − $ 0 ||" ≤ / (Ji & Telgarsky, ’19, Li et al., ‘20) for SL (Srivastava, ‘14, Goodfellow, ’13) for SL $ + 1/2 $ + 1 $ / $ 0 22
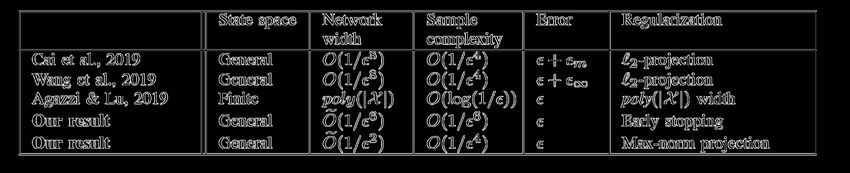
Convergence of Neural TD Assumption: ( ⋅ ) ∈ 1.6 (dense in cont. functions over a compact state space (Ji et al., ’19)) 8. − & 1ℰ ≤ where ℰ > 1 − Algorithm 1: Projection-Free NTD Algorithm 2: Max-Norm NTD Sample complexity: = ̅ / # Sample complexity: = / 7 Network width: = ̅ / # Network width: = ( )/ % Projection radius: > ̅ Here ̅ is the bound of the NTK norm of ⋅ . 23
Highlight • Some regularization + modest overparameterization à convergence to true value function More expressive power Faster convergence Projection-free NTD [Cai et al., ’19] Max-norm NTD (Early stopping) (ℓ" -reg.) (ℓ5 -reg) 24
Lyapunov Drift Analysis • Minimum norm solution: Z = [ , 0 + , 8 #8 " ],∈[+] + Note that ∇ 8 ; 0 , . Z → , → ∞. • Lyapunov function: Z = − ) ) < • Stopping time: = inf > 0: , − , 0 ) > for some . + • Drift bound: ) ?9 A@ : > @ = + 1 − ≤ −2 1 − 8= − & +O ) + , for < + 25
Drift Bound • Recall + 1 = + = , ! = ! ⋅ ∇" &! ! ; ( ) , g +1 − " " g = − " " + 2 /- g + " / − " " ! = ! + &! !#$ − &! ! . • Bound the second term g ] [ /- − = [ / ⋅ ∇0 >/ / ; ( ) - g ] − - - - = / ⋅ >/ / ; − / + / − ∇ >/ / ; 0 g + ∇ >/ / ; 0 g − ∇ >/ / ; g " ̅ ≤ − 1 − >/ − ≤ ≤ 6 26
Extensions and Open Questions • Extensions of Neural TD Learning ◦ Markovian setting ◦ Extended feature vector ◦ Smooth activation functions • Open Questions ◦ Beyond two-layers, can we achieve reduced overparameterization bound? ◦ Beyond two-layers, under what conditions can we achieve global convergence? ◦ Is early stopping or regularization necessary? ◦ Extension to deep Q-learning to find optimal policy? ◦ How to integrate RL with general nonlinear function approximation in a more principled manner? 27
Optimization-based RL Algorithms • Bellman-residual-minimization methods ◦ Residual gradient algorithm [Baird, 1995] Rich theory and gradient-based algorithms for nonconvex optimization ◦ Gradient TD [Sutton et al., 2009] ◦ Least-Squares Policy Iteration [Antos et al., 2006] ◦ SBEED [Dai et al., 2018] Exploitation of off-policy data • Linear programming-based methods Adaptation to neural network approximation ◦ Stochastic primal-dual method [Chen & Wang, 2016] [Lee & He, 2018] ◦ Dual actor-critic [Dai et al., 2017] Extensibility (safety, multi-agent RL, etc) ◦ Primal-dual stochastic mirror descent [Jin & Sidford, 2020] ◦ Logistic Q-learning [Bas-Serrano et al., 2021] • Policy gradient methods ◦ Natural policy gradient method (NPG) [Kakade, 2001] ◦ Trust region policy optimization (TRPO) [Schulman et al., 2015] ◦ Proximal policy optimization algorithm (PPO) [Schulman et al., 2017] ◦ Entropy-regularized policy gradient methods and actor-critic algorithms 28
Revisit Bellman Optimality Equation • Recall the Bellman optimality equation: • Equivalently: ◦ The -operator is highly nonsmooth and causes instability when function approximation is used. 29
Smoothing the -Operator • Introduce entropic regularization to Bellman optimality equation, ◦ , = − ∑ log is the entropy, > 0 is the smoothness parameter • The smoothed Bellman operator is also a -contraction.
Bellman Residual Minimization • Minimizing mean-squared smoothed Bellman error: Swimmer Hopper (CSO): (Min-Max SO): Convergent off-policy RL algorithm with nonlinear function approximation [Dai et al., ICML 2018] Caveat: require solving nonconvex-(non)concave min-max optimization! 31
Linear-programming-based Method • LP formulation: (Primal policy): (Dual policy): (Min-Max SO): Convergent off-policy RL algorithm w/o function approximation [Dai et al., 2017; Donghwan and H., 2019] Caveat: lack of duality; require solving nonconvex-(non)concave min-max optimization! 32
Summary • Understanding the convergence and generalization of deep RL from modern deep learning theory • Principled approaches for RL with neural network approximation Value-based methods Optimization-based methods Policy-based methods • Neural TD learning • Bellman Residual Minimization • Neural Policy Gradient • Neural Q-learning • Linear Programming • Neural Actor Critic Open Questions • Benefits of depth and different architectures? • Nonconvex min-max optimization? • Regularization and sample complexity? 33
Reference • [Cayci, Satpathi, H., Srikant, 2021] Sample Complexity and Overparameterization Bounds for Temporal Difference Learning with Neural Network Approximation. arXiv preprint arXiv:2103.01391, 2021. • [Dai et al., 2018] SBEED: Convergent Reinforcement Learning with Nonlinear Function Approximation. ICML 2018. • [Du et al., 2019] Gradient Descent Provably Optimizes Over-parameterized Neural Networks. ICLR 2019. • [Fan et al., 2020] A Theoretical Analysis of Deep Q-Learning. arXiv: 1901.00137, 2019. 34
You can also read