Evolutionary Algorithms for Tracking Algorithm Parameter Optimization
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
EPJ Web of Conferences 251, 03071 (2021) https://doi.org/10.1051/epjconf/202125103071
CHEP 2021
Evolutionary Algorithms for Tracking Algorithm Parameter
Optimization
Peter Chatain1 , Rocky Garg1 , and Lauren Tompkins1,∗
1
Stanford University
Abstract. The reconstruction of charged particle trajectories, known as track-
ing, is one of the most complex and CPU consuming parts of event processing
in high energy particle physics experiments. The most widely used and best
performing tracking algorithms require significant geometry-specific tuning of
the algorithm parameters to achieve best results. In this paper, we demonstrate
the usage of machine learning techniques, particularly evolutionary algorithms,
to find high performing configurations for the first step of tracking, called track
seeding. We use a track seeding algorithm from the software framework A
Common Tracking Software (ACTS). ACTS aims to provide an experiment-
independent and framework-independent tracking software designed for mod-
ern computing architectures. We show that our optimization algorithms find
highly performing configurations in ACTS without hand-tuning. These tech-
niques can be applied to other reconstruction tasks, improving performance and
reducing the need for laborious hand-tuning of parameters.
1 Introduction
Charged particle trajectory finding, called tracking, is typically the most computationally ex-
pensive task for particle physics experiments at colliders. Precise and efficient measurements
of charged particle trajectories are critical for the entire physics program: from reconstruct-
ing low momentum tracks in order to identify primary vertices, to using medium momentum
tracks to identify heavy flavor decays and calculate jet energies, to accurately measuring
high momentum messengers of electroweak particles or new physics. Great effort is put into
optimizing tracking algorithms as this effort yields both resource savings and physics perfor-
mance improvements. However, these algorithms have many tuneable parameters which can
make finding an optimal parameter set difficult. Approaches which automate the process of
finding high performing parameter sets have the potential to reduce the effort spent in finding
the configurations, as well as these approaches scan a larger range of parameters, allowing
for potentially more efficient solutions.
Tracking typically has two components: track finding, a pattern recognition step in which
track candidates are assembled from the data, and track fitting, a parameter estimation step in
which the track parameters are determined from the track candidates. This paper focuses on
the first stage of track finding, called track seeding, as a proof of principle for our parameter
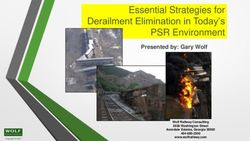
optimization approach. In the track seeding step, shown schematically in Fig. 1, groups
of three space points, or clustered detector hits, are tested for compatibility with a helical
∗ e-mail: laurenat@stanford.edu
© The Authors, published by EDP Sciences. This is an open access article distributed under the terms of the Creative Commons
Attribution License 4.0 (http://creativecommons.org/licenses/by/4.0/).EPJ Web of Conferences 251, 03071 (2021) https://doi.org/10.1051/epjconf/202125103071
CHEP 2021
Space Point
Figure 1. Schematic illustration of track seeding.
Yellow filled circles represent space points. Blue and
green loops indicate seeds, red lines indicates full
Seed tracks. Figure, modified with permission, from [1].
Silicon
Track
Nominal
Interaction
Point
trajectory. Only seeds passing a set of selections are passed on for the track following step,
which adds in space points from other detector layers. An ideal track seeding algorithm is
very efficient at finding seeds for true particle trajectories, yet does not produce a proliferation
of fake seeds which do not correspond to true trajectories, and does not produce duplicate, or
multiple seeds per true charged particle. The later requirement on fake and duplicate seeds
reduces the processing load on the downstream elements of the tracking algorithms. A more
detailed description of the specific track seeding implementation is presented in section 2 .
In this work we consider two methods for parameter set tuning, evolutionary algo-
rithms [2] and parameter sweeps [3], and compare these results to hand-tuning of the algo-
rithms. Evolutionary algorithms, described in more detail in Section 4, are machine learning
techniques inspired by natural evolutionary processes. Parameter sweeps are considered as a
simple alternative, where a linear, iterative scan over parameter values is automated. As will
be shown, evolutionary algorithms obtain the highest performing parameter sets for track
seeding, as determined by the efficiency, fake rate, and duplicate rate. Processing time is not
explicitly checked in this work, although it is implicitly tracked through duplicate and fake
rates, and could be incorporated in a future iteration of this work.
2 Description of the Problem: Track Seeding
2.1 A Common Tracking Software (ACTS)
The work presented here is based on track seeding as implemented in the A Common Track-
ing Software (ACTS) suite [4]. ACTS is an experiment agnostic tracking software framework
which supports parallel processing through strict thread safety. It is independent of both the
detector technologies used and the magnetic field description of the experiment it is being
used for. It is able to achieve this independence through the development of an event data
model and geometry description that does not depend on any specific details of a particular
detector and by implementing algorithms which are general mathematical formulations with
no assumptions on detector geometry. Thus far it has been used with the ATLAS experi-
ment geometry, the ATLAS HL-LHC upgraded detector geometry, the Open Detector [5],
the Belle-II detector [6] and the LDMX detector [7].
2.2 Track Seeding in ACTS
As mentioned in the introduction, a seed is comprised of three space points, where each space
point is the x, y, z coordinates of clustered detector hits. Because there is a known magnetic
2EPJ Web of Conferences 251, 03071 (2021) https://doi.org/10.1051/epjconf/202125103071
CHEP 2021
field, these three space points define a unique helical particle trajectory. The seeding algo-
rithm employed by ACTS [8] loops over many possible combinations of three hits, so the
algorithm has O(n3 ) complexity. Utilizing configurable radius parameters, a subset of the
detector space points can be selected to form seeds only from particular detector layers, re-
ducing the number of combinations which must be tested. Then, the seeding algorithm relies
on many other configurable parameters, described below, to reduce the number of possible
good combinations and arrive at a reasonably quick algorithm. These parameters are heavily
detector dependent, and many of them don’t have an obvious value.
The tracking stage will use this seed as a starting point to find the full particle trajectory.
If no seed exists for a particle, that particle will not be reconstructed. On the other hand,
finding too many fake or duplicate seeds increases the time needed for tracking. We use
the following definitions of the efficiency, fake rate and duplicate metrics to assess our track
seeding performance:
• Efficiency: Fraction of true charged particles matched to a seed. True charged particles
are required to have transverse momentum, pT , greater than 500 MeV, pseudorapidity, |η|,
of less than 2.5, and to have produced at least 3 hits in the layers used for seeding. This
corresponds to a technical efficiency, which indicates an algorithm’s ability to find a seed
if a particle produced a sufficient number of hits.
• Fake Rate: Fraction of seeds that don’t correspond to a true charged particle. A seed is
considered not matched to a true charged particle if all of it’s three space points do not
correspond to a single truth particle.
• Duplicate Rate: Fraction of seeds that match to a true charged particle already found by
another seed.
The goal of our work is to develop an algorithm that automatically finds the configuration
on any detector geometry which achieves the highest efficiency while maintaining a low fake
and duplicate rate. In addition, it should give insight on how the different parameters are
affecting the performance to aid future work.
2.3 Configurable parameters
The track seeding algorithm has a total of 22 configurable parameters. In this work we have
chosen to tune the following parameters as they have the largest effect on the overall perfor-
mance:
• maxPtScattering: Charged particles will undergo multiple scattering due to material inter-
actions in the detector. The seeding algorithm allows for seeds to have points on helical
trajectories consistent with the expected multiple scattering based on the estimated pT of
the underlying particle. High pT particles have very small scattering, however the seed
estimate of the pT is very poor in this regime. maxPtScattering is the maximum value of
pT considered for the multiple scattering consistency criterion. Any seed with an estimated
pT above this cut will not apply the multiple scattering consistency criterion. In later im-
plementations of the track seeding code available after this work, this cut is applied such
that use the multiple scattering estimated at this cut pT value is used for the compatibility
criterion.
• impactMax: The impact parameter is the closest distance between the interaction point
(where the particles were created) and the helical path defined by the seed. The algorithm
discards seeds with an impact parameter greater than impactMax.
• deltaRMin: The minimum radius between two space points in a seed.
3EPJ Web of Conferences 251, 03071 (2021) https://doi.org/10.1051/epjconf/202125103071
CHEP 2021
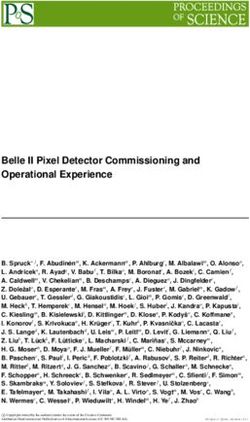
Figure 2: An r − z view of the Generic Detector. The blue shaded area corresponds to the
inner pixel layers used for seeding.
• deltaRMax: The maximum radius between two space points in a seed.
• sigmaScattering: This cut determines how many standard deviations of multiple scattering
angle are allowed when calculating the compatibility of hits with a trajectory.
• radLengthPerSeed: The average radiation length a particle traverses. Similar to sigma
scattering, this is used when calculating how much a particle will scatter and depends upon
the material of the detector.
• maxSeedsPerSpM: Given a middle space point, if multiple seeds exist, they are sorted
based on how likely they are to be a good seed. Then, only the first n + 1 seeds, where n is
less than maxSeedsPerSpM are chosen.
The majority of these parameters are related to the detector geometry, either through the
positioning of the physical layers (e.g., deltaRMin, deltaRMax) or through the material of the
detector (e.g., sigmaScattering, radLengthPerSeed).
3 Detector and Datasets
We tested our algorithm on the Generic Detector, a detector design created for the Track ML
challenge [5] and meant to function in a high pile-up, High Luminosity LHC-like environ-
ment. The Generic Detector is a hermetic collider detector design, with four layers of barrel
short pixels and 7 short pixel disks. It is shown in Fig. 2. We used two input datasets for
this detector: a sample
√ containing 10000 muons per event and a sample of top-quark pairs
(tt¯) produced at s = 14 TeV with 200 additional pile-up vertices per event generated with
Pythia8 [9]. The tt¯ sample had approximately 2000 findable particles per event. The sin-
gle muons were produced with flat distributions in 1/pT , |η| and impact parameter over the
acceptance of the detector.
4 Methods
4.1 Evolutionary Algorithms
We implemented an evolutionary algorithm using Distributed Evolutionary Algorithms in
Python (DEAP) [10]. Evolutionary algorithms use a process analogous to natural evolu-
tion. The algorithm defines a population of individuals, where each individual represents
4EPJ Web of Conferences 251, 03071 (2021) https://doi.org/10.1051/epjconf/202125103071
CHEP 2021
one parameter set of the seeding algorithm. We initialized the population as 50 copies one
track seeding parameter configuration. Then, in each iteration of the evolutionary algorithm,
called a generation, every individual is evaluated by running the seeding algorithm on the test
dataset, and then calculating a score for that individual utilizing a custom scoring function.
After evaluating the population, a selection function randomly chooses individuals such that
better performing ones are more likely to stay, and worse performing ones are more likely to
be removed.
For our selection function, we chose a tournament function with size 3, the default size
in DEAP. A tournament of size n proceeds as follows: choose n random individuals, pick the
one with the highest score, and repeat this 50 times so that the population stays a constant
size. Next, each individual has a 30% chance of being selected for mutation. If selected,
each parameter within an individual has a 20% chance of being mutated. The mutation for a
parameter j in individual i is given by
x(i) (i) (i)
j := x j + | ∼ N(0, s j ) (1)
where s(i)
j is the unique strategy for each parameter j within an individual i. This strategy is
initialized randomly between 0.01 and 0.3, and also gets mutated itself along with x(i) j . To
make sure each parameter is mutated by a consistent magnitude, we normalize x j to be close
to 1 before mutation, and then scale it back after mutation. Population sizes of 40–100 were
tested and found to have no effect on the outcome. 16 generations were chosen to match
the number of cores available for this study. [11] suggests that outcome of the evolutionary
algorithm does not depend strongly on the parameters of the evolutionary algorithm itself
(e.g., population size, number of generations, tournament size, mutation rate, etc.).
Considerable discretion is given to the choice of scoring function. Ideally it reflects the
overall goals of the optimization problem. The simplest possible case would be to optimize
a single metric, such as the efficiency of the track seeding. However, in most cases the
optimization problem is more complicated and a variety of metrics must be combined, with a
relative weight reflecting their relative importance in the overall optimization problem, into a
single scoring function. We choose to optimize a high efficiency and low fake and duplicate
rate, with relatively higher importance given to maintaining a high efficiency, by constructing
the following scoring function:
Fake% × Duplicate%
Score = Efficiency% − (2)
K
We tested several K values for our study and found that K = 1000 offered a reasonable
balance between efficiency and fake/duplicate rates. For example, with K = 100 maximum
efficiencies of ∼ 60% were obtained, whereas with K = 1000 efficiencies of greater than 98%
were obtained for reasonable fake and duplicate rates.
During the training process, certain configurations break the seeding algorithm. For ex-
ample, we can not have negative values for most parameters, so very loose bounds were
placed on each parameter during training.
4.2 Parameter Sweep
Although the user will not know certain parameters, they can still define reasonable bounds on
each parameter. For example, we can exclude checking deltaRMin of less than a value known
from the detector geometry. This allows us to “sweep” over ranges of allowed parameters
automatically.
5EPJ Web of Conferences 251, 03071 (2021) https://doi.org/10.1051/epjconf/202125103071
CHEP 2021
For each parameter, we split up the range between the maximum and minimum for that
parameter into 100 different values. Then, holding the other parameters fixed, we chose the
best performing value as determined by the scoring function (Eqn. 2), and use this value
when optimizing the next parameter. Then, we loop over the parameters until the score of the
algorithm remained unchanged. This is a greedy algorithm as it optimizes one parameter at a
time.
5 Results
5.1 Generic Detector
The generic detector track seeding performance was first “hand-tuned” by performing linear
scan of the parameters above and picking the configuration which gave the best efficiency
for a suitably low total number of produced seeds, which is a proxy for the fake and dupli-
cate rate. The values obtained are listed in Table 1 and the corresponding parameters are
in Table 2. Several iterations were done of this process, but because the exploration of the
multi-dimensional parameter space was very inefficient, we do not claim that our working
point was the best that could possibly be found by hand-tuning. We took a best effort for
reasonable resources approach and then explored automated alternatives.
To test the evolutionary algorithm’s ability to optimize the track seeding parameters, four
of the parameters listed in Section 2.3 were changed from their hand-tuned value by a factor
of two, and the sigmaScattering parameter, a key parameter for the efficiency, was changed
from it’s default value of 2 to 0.2 to prove that the algorithm works without starting from a
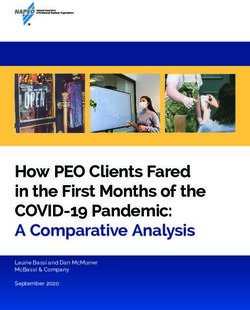
hand-tuned working point. The top row of Figure 3 shows the evolution of the best perform-
ing individuals for two variables, maxSeedsPerSpM and sigmaScattering, over the course of
200 generations as a function of the performance metrics they most affect: the duplicate rate
and efficiency, respectively. These figures show the typical progression of a variable in the
evolutionary algorithm process, and show the impact on one component of the scoring func-
tion in terms of the best performing individual. Table 1 shows the achieved efficiency, fake
rate and duplicate rate for both the muon and tt¯ sample. A higher efficiency was obtained for
both the muon and tt¯ samples as compared to the hand-tuned values. The scoring function for
the evolutionary algorithm allowed a higher duplicate rate than found with the hand-tuned
method and the fake rates were ∼ 25% lower for the muon sample and ∼ 25 % higher in
the tt¯ sample. The difference in these two datasets are most likely attributed to the higher
proportion of low momentum tracks and nuclear interactions in the tt¯ sample. Results for the
parameter sweep for the muon sample are also shown in Table 1, which finds performance
similar to the hand-tuned working point. A plot of the best efficiency, fake and duplicate rate
as a function of the sweep iteration is shown in Figure 4a. It can be seen that the fake and
duplicate rate are relatively unchanged while the efficiency is improved. No results are avail-
able for the tt¯ sample because the parameter sweep algorithm failed to converge too many
times to be a useful comparison.
In the case of the evolutionary algorithms, overfitting was checked by dividing the sam-
ples into test and train samples, where the parameters were derived from the training sample
and the efficiencies, fake and duplicate rates were checked in the test sample. The test and
train sample metrics were compatible within statistical uncertainties, indicating no overfit-
ting.
6 Conclusions
We have shown that evolutionary algorithms are a powerful and efficient method for deter-
mining high performing parameter sets for track seeding. We have also used our methods
6EPJ Web of Conferences 251, 03071 (2021) https://doi.org/10.1051/epjconf/202125103071
CHEP 2021
Dataset Notes Efficiency % Fake % Duplicate %
Muon Hand 98.9 8 54
Muon EA 99.4 6 70
Muon PS 98.28 4.44 63.95
tt¯ Hand 96.6 38 34
tt¯ EA 98.34 47 72.8
Table 1: Generic Detector results comparing best values found by hand-tuning (Hand), evo-
lutionary algorithm (EA) and parameter sweep (PS) for the muon and tt¯ samples. Note there
are no parameter sweep values for the tt¯ sample due to a high rate of failure of this method
for this sample. Uncertainties on the efficiencies are O(0.25%).
(a) (b)
Figure 3: Results for the best individual as a function of generation number for the muon
sample with the Generic Detector (top). The blue curve and left-axis in each plot shows the
duplicate rate (left) or efficiency (right) for the best performing individual of that generation
and the red curve shows the value of the variable of interest, with it’s name and value on the
right y−axis, for that individual.
Variable Generic Hand Generic EA
maxPtScattering [GeV] 1200 30
impactMax [mm] 3 1.1
deltaRMin [mm] 1 0.25
sigmaScattering [σ] 4.0 4.0
deltaRMax [mm] 80. 60
maxSeedsPerSpM 2 1
radLengthPerSeem [λ] 0.005 0.0023
Table 2: Comparison of optimized parameter values for the generic detector, as determined
from the muon sample.
7EPJ Web of Conferences 251, 03071 (2021) https://doi.org/10.1051/epjconf/202125103071
CHEP 2021
(a)
Figure 4: Efficiency, fake and duplicate rate for the parameter sweep as a function of the
iteration number in the first sweep for the Generic Detector.
for other detectors such as the LDMX and ATLAS detectors, and preliminary results indicate
similar success. In future work we plan to embed this approach into the ACTS framework
and to apply it to other stages of track reconstruction.
We note that the process described above is naturally suited to parallelization. For our
studies we used a machine of 16 cores, which allowed us to evaluate 12-16 configurations
per generation per event in parallel, leading to 30 minutes of total (wall) running time for
an optimization run. This is certainly a lower bound on what could be used for this process.
More generations and/or more events could be used in a system with higher parallelism.
7 Acknowledgments
This work was supported by the National Science Foundation under Cooperative Agreement
OAC-1836650.
We thank Andreas Salzburger, Xiaocong Ai and Robert Langenberg for discussions about
ACTS and track seeding.
References
[1] H.M. Gray, Ph.D. thesis (2010), presented on 09 Nov 2010, https://cds.cern.ch/
record/1309943
[2] P.A. Vikhar, Evolutionary algorithms: A critical review and its future prospects, in 2016
International Conference on Global Trends in Signal Processing, Information Comput-
ing and Communication (ICGTSPICC) (2016), pp. 261–265
[3] M.E. Samples, M.J. Byom, J.M. Daida, Parameter Sweeps for Exploring Parameter
Spaces of Genetic and Evolutionary Algorithms (Springer Berlin Heidelberg, Berlin,
Heidelberg, 2007), pp. 161–184, ISBN 978-3-540-69432-8, https://doi.org/10.
1007/978-3-540-69432-8_8
[4] P. Gessinger, H. Grasland, H. Gray, M. Kiehn, F. Klimpel, R. Langenberg,
A. Salzburger, B. Schlag, J. Zhang, X. Ai, EPJ Web Conf. 245, 10003 (2020)
[5] S. Amrouche, L. Basara, P. Calafiura, V. Estrade, S. Farrell, D.R. Ferreira, L. Finnie,
N. Finnie, C. Germain, V.V. Gligorov et al., The Springer Series on Challenges in Ma-
chine Learning p. 231–264 (2019)
8EPJ Web of Conferences 251, 03071 (2021) https://doi.org/10.1051/epjconf/202125103071
CHEP 2021
[6] T. Abe, I. Adachi, K. Adamczyk, S. Ahn, H. Aihara, K. Akai, M. Aloi, L. Andricek,
K. Aoki, Y. Arai et al., Belle II Technical Design Report (2010), 1011.0352
[7] T. Åkesson, A. Berlin, N. Blinov, O. Colegrove, G. Collura, V. Dutta, B. Echenard,
J. Hiltbrand, D.G. Hitlin, J. Incandela et al., Light Dark Matter eXperiment (LDMX)
(2018), 1808.05219
[8] Track Seeding, ACTS Core Library Docs, https://acts.readthedocs.io/en/
latest/core/seeding.html, accessed: 2020-02-22
[9] T. Sjöstrand, S. Ask, J.R. Christiansen, R. Corke, N. Desai, P. Ilten, S. Mrenna,
S. Prestel, C.O. Rasmussen, P.Z. Skands, Comput. Phys. Commun. 191, 159 (2015),
1410.3012
[10] F.A. Fortin, F.M.D. Rainville, M.A. Gardner, M. Parizeau, C. Gagné, Journal of Ma-
chine Learning Research 13, 2171 (2012)
[11] M. Sipper, W. Fu, K. Ahuja, J.H. Moore, BioData Mining 11 (2018)
9You can also read