ROBOT DESIGN HARDWARE - NANOGIANTS ACADEMY E.V - NANOGIANTS ACADEMY EV
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
NanoGiants Academy e.V.
Robot Design Hardware
© 2017 NanoGiants Academy e.V. 1
This Presentation is one of four about FLL Robot Design
Hardware Navigation
Software Strategy
http://nano-giants.net/robot-design
© 2017 NanoGiants Academy e.V. 2
Requirements from FLL robot game and implementation with hardware
Robust
Caster wheel does not rip off
Agility
Construction
Transport in not a problem
EV3 used as a handle
Stability
Smooth front and sides
Back build to adjust with table walls
External Frame
Precision
Axels supported
Reduce stress
Minimal width, length, height Vehicle
Position of color sensor Geometry
Position of gyro sensor
Avoid risks
Display towards driver
EV3 and Cables
Cables „inside“
Maintainability
Battery socket easy to reach
Easy to extend
Fast, reliable change of tools Modular Tools
Improved development process
© 2017 NanoGiants Academy e.V. 3
All requirements can be fulfilled with one Education core set The photos in this presentation show a robot implementing all concepts discussed, although it is build from a single LEGO MINDSTORMS EV3 core set (45544). However, there are not too many parts left to build additional tool modules. We decided against publishing the building instructions. This presentation is meant to provide impulses, not perfect solutions. If more parts are available, many things could of course be done even better. Some related ideas can be found at the end of the presentation. © 2017 NanoGiants Academy e.V. 4
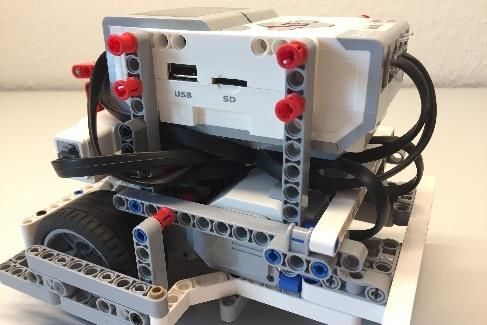
No wobble. No loose parts. The brick is a handle.
Robust
Construction
Additional lift arms ensure To ensure the caster wheel Only if the EV3 brick is firmly
right-angled connections and cannot be ripped-of, it needs connected, it can also be used
prevent that others get loose. to be integrated, not just as a handle.
inserted from the back.
© 2017 NanoGiants Academy e.V. 5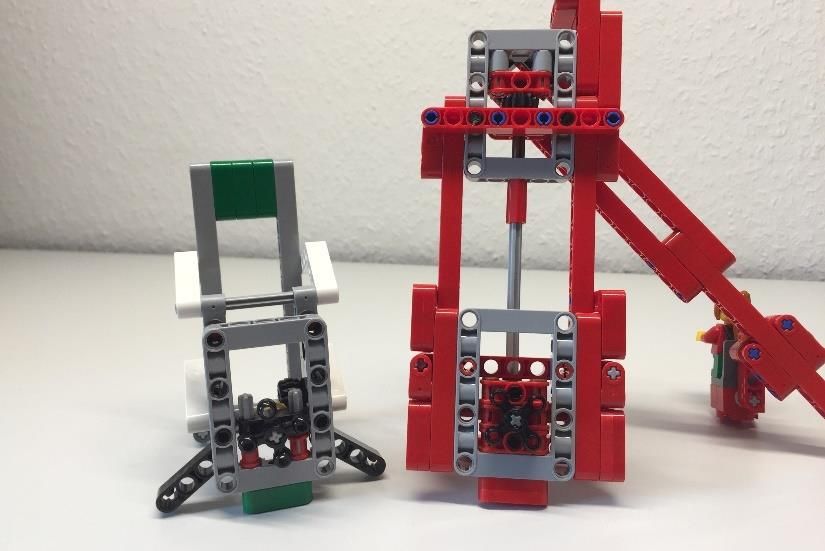
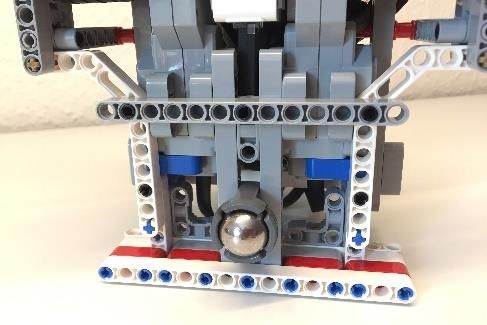
Reduced risk. Improved navigation. Precise Traction. External Frame Smooth front and sides Alignment with table walls If the motor axles are shielding the wheels prevent requires a solid, smooth back. supported on the outside, they the robot to get stuck at Cables must not get in the cannot bend. Distance models. way. between wheels is fixed. © 2017 NanoGiants Academy e.V. 6
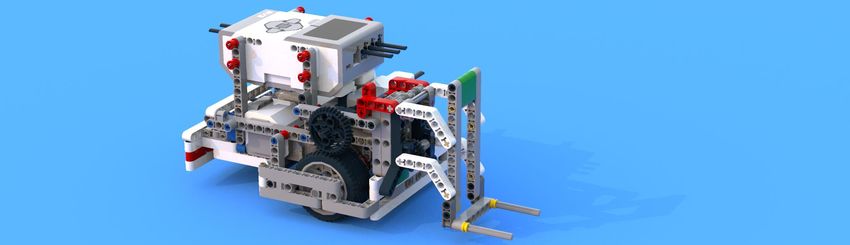
Compact format and sensors at the best positions Vehicle Geometry
Compact robots need less For effective use, the color Putting the gyro sensor
space to turn and have less sensor should be centered between the motors instead
issues with narrow passages. and in front of the wheels. somewhere on top avoids
Distance to mat is crucial. cable spaghetti.
Dimensions of the bot shown (tool excluded):
Width: 19
Motors, wheels, and shielding / axle support
Length: 22
color sensor before wheels, tool motor, caster wheel, and
sufficient room for cables on the back
For an example of an „EV3 minimal core“ see
Height: 16,5 Distance: 1 to 1,5 brick units
Wheels, motors, room for cables, and EV3 brick with battery
http://nano-giants.net/ev3-minimal-core/
© 2017 NanoGiants Academy e.V. 7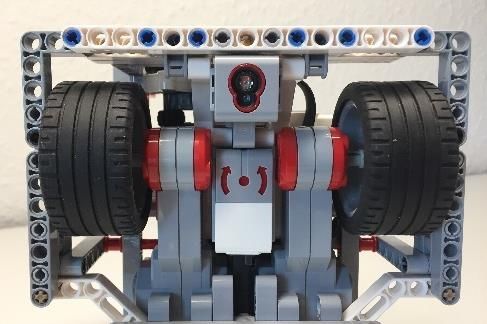
Make the EV3 brick part of the robot by design EV3 and Cables
Display in driving direction All cables “inside” between Battery plug accessible and
reduces driver’s stress when motors and EV3 prevents LEDs visible allows to charge
launching from base. that cable loops get tangled without taking the robot
with models or plugs get apart.
pulled.
© 2017 NanoGiants Academy e.V. 8
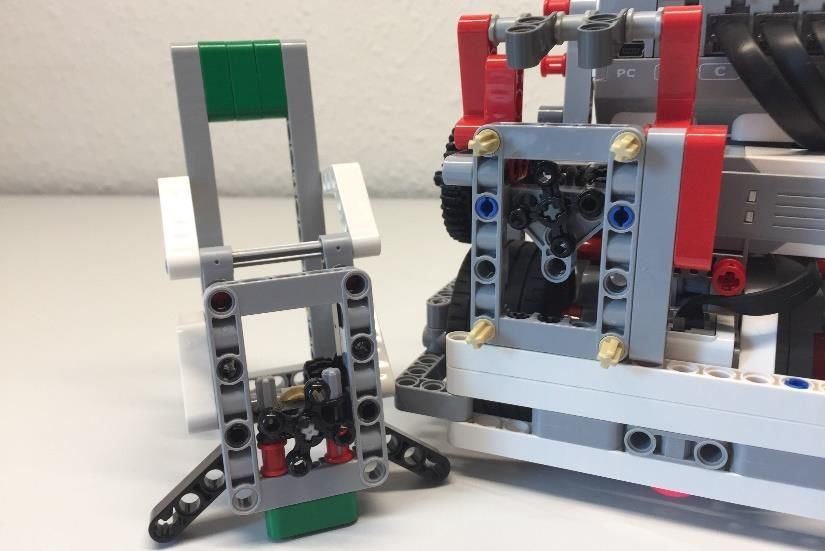
Modular tool are great for FLL robot game; important for development Modular Tools Modular tools reduce retooling time in Tools can be build and improved without robot game to seconds. modifying the robot. To build modular tools, the interface needs Several team members can work on to be defined once and must not be different tool modules in parallel. changed later. © 2017 NanoGiants Academy e.V. 9
Ideas to improve further, if more parts are available
Two tool motors instead only one Invent new interfaces for tool modules end test them
One at the front, the other at the back? Using other parts then those from the Education core set
Or both side-by-side? can lead to significantly more effective interfaces.
Modules using a single motor each? Talking to experienced teams or asking Google helps.
Or modules connecting to both motors?
Build and test many different tool modules
Add more color sensors If a tool module works ok, set it aside and build another
In any case keep one for line following (centered and in using a different approach. Only then decide which is
front of the wheels). better and improve that one further.
Additional ones at front or back allow to detect crossing The whole team can get creative here.
lines more easily.
Two color sensors side-by-side (but with significant Shield the color sensors
distance between them) allows to align square to a line. EV3 is already rather ignorant of additional sources of
light. Nonetheless, shielding the sensors can be beneficial.
One gyro sensor is sufficient Test: If the robot is placed on the mat and light emitted
from the sensor can be seen, stray light will also reach the
sensor.
© 2017 NanoGiants Academy e.V. 10Contact and further information
Mail:
academy@nano-giants.net
Web:
http://nano-giants.net
Facebook:
http://www.facebook.com/NanoGiantsAcademy
YouTube:
http://www.youtube.com/sapnanogiants
Heinz
© 2017 NanoGiants Academy e.V. 11You can also read