Stochastic Based Computation for Live Traffic
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
ISSN 2319-8885
Vol.04,Issue.34,
August-2015,
Pages:6800-6806
www.ijsetr.com
Stochastic Based Computation for Live Traffic
G. SRINIVASA RAO1, A. NAGA MOUNIKA2
1
Assoc Prof, Dept of MCA, Sri Vasavi Engineering College, Tadepalligudem, West Godavari, AP, India,
E-mail: gsr.pdrl@gmail.com.
2
PG Scholar, Dept of MCA, Sri Vasavi Engineering College, Tadepalligudem, West Godavari, AP, India,
E-mail: mouni.honey76@gmail.com.
Abstract: Processing the briefest way between two given areas in a street system is a critical issue that discovers applications in
different guide administrations and business route items. The cutting edge answers for the issue can be isolated into two classes:
spatial-rationality based techniques and vertex-significance based methodologies. The two classes of methods, nonetheless, have
not been analyzed efficiently under the same exploratory structure, as they were created from two free lines of examination that
don't allude to one another. This renders it religion for a specialist to choose which system ought to be received for a particular
application. Besides, the test assessment of the current methods, as displayed in past work, misses the mark in a few viewpoints.
A few systems were tried just on little street systems with up to one hundred thousand vertices; some methodologies were
assessed utilizing separation inquiries (rather than most brief way questions), to be specific, inquiries that approach just for the
length of the briefest way; a best in class procedure was analyzed taking into account a broken usage that prompted erroneous
inquiry results. To address the above issues, this paper displays an extensive correlation of the most developed spatial-rationality
based and vertex-significance based methodologies. Utilizing a mixed bag of genuine street systems with up to twenty million
vertices, we assessed every method as far as its preprocessing time, space utilization, and inquiry productivity (for both most brief
way and separation inquiries). Our exploratory results uncover the attributes of distinctive strategies, in view of which we give
rules on selecting proper systems for different situations. Not only traffic it can be extended for knowledge of other information
such as help centers, road conditions.
Keywords: TDFP(Time Dependent Fastest Path), Dijkstra algorithm-TDFP(Bi Directional Time Dependent Fastest Path).
I. INTRODUCTION the real quickest way between any pair of hubs for the
Most limited way calculation is an essential capacity in duration of the day. In particular, the quickest between a
advanced auto route frameworks. The continually developing source and a destination hub changes relying upon the flight
ubiquity of online guide applications and their wide time from the source. Lamentably, every one of those
organization in cell phones and auto route frameworks, strategies that expect steady edge weights neglect to address
expand number of customer quest for point to point speediest the speediest way reckoning in true time subordinate spatial
ways and the relating go times. On static street systems systems.
where edge expenses are consistent, this issue has been
broadly concentrated on and numerous proficient speedup The time subordinate quickest way issue was first
strategies have been produced to the speediest way in a indicated by Dreyfus to be reasonable super-polynomial in
matter of milliseconds. The static quickest way FIFO organizes by an inconsequential alteration to Dijkstra
methodologies make the disentangle supposition that the calculation where, practically equivalent to most limited way
travel time for every edge of the street system is consistent. removes, the landing time to the hubs is utilized as the marks
In any case, in certifiable the genuine travel time on a street that frame the premise of the insatiable calculation. The FIFO
section vigorously relies on upon the movement clogging property which ordinarily holds for some systems including
and, along these lines, there is a component of time i.e., time street systems, recommends that moving articles exit from an
subordinate. Case in point, demonstrates the variety of travel edge in the same request they entered the edge1. Be that as it
time for a Particular street section of I-10 turnpike in Los may, the adjusted Dijkstra calculation is excessively
Angeles as an element of landing time to the portion. As moderate for online guide applications which are generally
demonstrated, the travel-time changes with time and the conveyed on extensive systems and require verging on
adjustment in travel-time is noteworthy. For example, from moment reaction times. On the other side, there are numerous
8AM to 9AM the travel-time of the fragment changes from effective pre reckoning methodologies that answer speediest
32 minutes to 18 minutes. By incitement, one can watch that way questions in close ongoing) in static street systems. Be
the time ward edge go times yield an impressive change in that as it may, it is infeasible to extend these ways to deal
Copyright @ 2015 IJSETR. All rights reserved.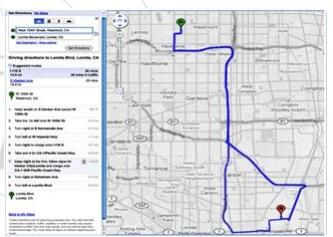
G. SRINIVASA RAO, A. NAGA MOUNIKA
with time ward systems. This is on the grounds that the info This is on the grounds that the inquiry time can be
size (i.e., the quantity of quickest ways) increments definitely dependably between any two of the interims which are not
in time ward systems. caught by the model, and consequently the lapse is collected
on edge along the way. In George and Shekhar proposed a
period collected diagram approach where they total the go
times of every edge over the time moments into a period
arrangement. Their model obliges less space than that of the
TEN and the outcomes are still surmised without any limits.
Dreyfus demonstrated that TDFP issue can be settled by a
speculation of Dijkstra's system as proficiently concerning
static speediest way issues. Notwithstanding, Halpern
demonstrated that the speculation of Dijkstra's calculation is
valid for FIFO systems. In the event that the FIFO property
does not hold in a period ward system, then the issue is NP-
Hard. Orda and Rom presented Bellman-Ford based
calculation where they focus the way toward destination by
refining the entry time works on every hub in the entire time
Fig.1. interim T. Kanoulas et al. proposed Time Interval All Fastest
Path (allFP) approach in which they keep up a need line of all
In particular, since the length of as-d way changes
ways to be extended as opposed to sorting the need line by
relying upon the takeoff time from s, the speediest way is not
scalar qualities. They count every one of the ways from
one of a kind for any pair of hubs in time ward systems. It
source to a destination hub which causes exponential running
has been guessed in and settled in that the quantity of
time in the most pessimistic scenario Ding et al. utilized a
quickest ways between any pair of hubs in time subordinate
variety of Dijkstra's calculation to take care of the TDFP
street systems can be super-polynomial. Consequently, a
issue. With their TDFP calculation, utilizing Dijkstra like
calculation which considers the each conceivable way
development, they decouple the way determination and time
(comparing to each conceivable takeoff time from the source)
refinement (registering most punctual entry time capacities
for any pair of hubs in substantial time-ward systems would
for hubs) for a given beginning time interim T. Their
experience the ill effects of exponential time and restrictively
calculation is additionally indicated to keep running in
expansive capacity prerequisites. For instance, the time
exponential time for unique cases.
subordinate augmentation of Contraction Hierarchies (CH)
and SHARC pace up strategies experience the ill effects of The center of both and is to locate the quickest way in
the illogical pre-computation times and unfortunate time subordinate street systems for a given begin time
stockpiling multifaceted nature. interim. The ALT calculation was initially proposed to
quicken speediest way processing in static street systems.
II. RELATED WORK
With ALT, an arrangement of hubs called points of interest
In the most recent decade, various effective speediest way
are picked and after that the most limited separations between
calculations with pre processing techniques have been
every one of the hubs in the system and every one of the
proposed. In any case, there are constrained quantities of
historic points are registered and put away. ALT utilizes
studies that emphasis on productive calculation of time ward
triangle disparity in view of separations to the points of
speediest way (TDFP) issue. Cooke and Halsey initially
interest to acquire a heuristic capacity to be utilized as a part
contemplated TDFP calculation where they tackled the issue
of A* inquiry. The time subordinate variation of this system
utilizing Dynamic Programming as a part of discrete time.
is concentrated on in (unidirectional) and bidirectional A*
Another discrete time answer for TDFP issue is to utilize
look) where heuristic capacity is registered w.r.t lower bound
time extended systems. The time extended system (TEN) and
diagram. In any case, the point of interest determination is
discrete time methodologies expect that the edge weight
extremely troublesome and the span of the pursuit space is
capacities are characterized over a limited discrete window of
seriously influenced by the decision of milestones. So far no
time t ∈t0, t1, .., tn, where tn is controlled by the aggregate
ideal methodology concerning historic point determination
span of time interim under the thought. In this way, the issue
and irregular inquiries has been found. In particular, point of
is lessened to the issue of processing least weight ways over a
interest choice is NP-hard and ALT does not ensure to yield
static system for every time window. Subsequently, we can
the littlest hunt spaces as for speediest way processings
apply any static quickest way calculations to TDFP. Despite
where source and destination hubs are picked aimlessly. Our
the fact that these calculations are anything but difficult to
trials with true time ward go times demonstrate that our
outline and actualize, they have various deficiencies. Initial,
methodology devours substantially less capacity when
TEN models make a different occurrence of system for every
contrasted with ALT based methodologies and yields
time example subsequently yielding a generous measure of
speedier reaction times.
capacity overhead. Second, such methodologies can just give
surmised results in light of the fact that the model misses the In two diverse studies, The Contraction Hierarchies (CH)
condition of the system between any two discrete time and SHARC techniques (additionally created for static
moments. Also, the contrast between the briefest way systems) were expanded to time-subordinate street arranges
acquired utilizing TEN methodologies and the ideal most in and individually. The principle thought of these methods is
limited way is unbounded. to expel irrelevant hubs from the chart without changing the
International Journal of Scientific Engineering and Technology Research
Volume.04, IssueNo.34, August-2015, Pages: 6800--6806Stochastic Based Computation for Live Traffic
quickest way separations between the staying (more critical) movement conditions. The go times which consider the
hubs. Be that as it may, not at all like the static systems, the activity conditions are just processed by considering
significance of a hub can change for the duration of the time expanded edge weights (that relates to movement blockage)
under thought in time ward systems, henceforth the for every way. Be that as it may, our time subordinate way
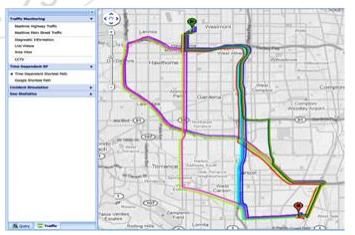
significance of the hubs are time differing. Considering the arranging results in diverse ideal ways for distinctive takeoff
super-polynomial data size, and thus the super-polynomial times from the source. Case in point, consider where Google
number of imperative hubs with time-ward arranges, the Maps offer two option ways (and their go times under no-
principle weaknesses of these methodologies are illogical activity and movement conditions) for a starting point and
pre-handling times and broad space utilization. Case in point, destination combine in Los Angeles street system. Note that
the precomputation time for SHARC in time subordinate the way proposal and the go times continue as before paying
street systems takes over 11 hours for generally little street little mind to when the client presents the inquiry. Then
systems (e.g. LA with 304,162 hubs). In addition, because of again, portrays the time subordinate way suggestions (in
the critical utilization of curve banners, SHARC does not distinctive hues for diverse flight times) for the same starting
work in a dynamic situation: at whatever point an edge point and destination pair where we processed the time-
expense capacity changes, circular segment banners ought to subordinate quickest ways for 38 successive takeoff times
be recomputed, despite the fact that the diagram segment somewhere around 8AM and 5:30PM, separated 15 minutes
require not be upgraded. While CH additionally experiences apart2. As demonstrated, the ideal ways change much of the
moderate pre-preparing times, the space utilization for CH is time over the span of the day as shown in Fig.2.
no less than 1000 bytes per hub for less fluctuated edge-
weights where the capacity expense increments with true
time-ward edge weights. Accordingly, it may not be practical
to apply SHARC and CH to mainland size street systems
which can comprise of more than 45 million street sections
(e.g., North America street system) with perhaps extensive
shifted edge weight.
III. TIME DEPENDENT PATH PLANNING
We clarify the distinction between quickest processing in
time indigent and static spatial systems. We likewise talk
about the significance and the practicality of time ward
course arranging. To outline why fantastic speediest way
processings in static street systems may return nonoptimal
results, we demonstrate a basic sample in where a spatial Fig.2. Time-dependent graph.
system is displayed as a period ward diagram and edge go
times are capacity of time. Consider the depiction of the One may contend against the plausibility of time ward
system with edge weights comparing to travel-time values at way arranging calculations because of an inaccessibility of
t=0. With fantastic quickest way reckoning methodologies the time-ward edge go times, or b) unimportant increase of
that nonchalance time ward edge go times, the speediest way time ward way arranging (i.e., how much time dependent
from s to d experiences v1, v2, v4 with an expense of 13 time arranging can enhance the travel-time) over static way
units. On the other hand, when v2is came to (i.e., at t=5), the arranging. To address the first contention, take note of that
expense of edge e(v2, v4) changes from 8 to 12 time units, late advances in sensor systems empowered instrumentation
and subsequently coming to d through v2 takes 17 time units of street systems in real urban communities for gathering
rather than 13 as it was expected at t=0. Interestingly, if the continuous activity information, and henceforth it is currently
time dependency of edge go times are considered and thus possible to precisely show the time ward go times in light of
the way experiencing v3 was taken, the aggregate travel the immense measures of recorded information. For example,
expense would have been 15 units which is the real ideal at our exploration focus as shown in Fig.3. In the mean time,
speediest way. We call this inadequacy of the excellent we likewise witness that the main route administration
quickest way reckoning methods as no look ahead issue. suppliers began discharging their time ward travel time
Shockingly, a large portion of the present best in class way information for street systems at high fleeting determination.
arranging applications experiences the no look ahead With respect to the second contention, a few late studies
weakness and, consequently, their speediest way suggestion demonstrated the significance of time ward way arranging in
continues as before for the duration of the day paying little street systems where genuine activity datasets have been
heed to the takeoff time from the source. utilized for the appraisal. For instance, in we report that the
speediest way reckoning that considers time-ward edge go
Albeit some of these applications give elective ways times in Los Angeles street system diminishes the travel-time
under movement conditions (which may appear to be like by as much as 68% over the quickest way calculation that
time ward arranging at first), we watch that the suggested expect steady edge go times. We mentioned the comparable
option ways and their relating go times still stay objective fact in another study under IBM's Smart Traffic
extraordinary amid the day, and consequently no time ward Project where the time-subordinate speediest way processing
arranging. To the best of information, these applications in Stockholm street system can enhance the travel time
register top-k speediest ways (i.e., k elective ways) and their exactness up to 62%.
comparing go times with and without considering the
International Journal of Scientific Engineering and Technology Research
Volume.04, IssueNo.34, August-2015, Pages: 6800-6806G. SRINIVASA RAO, A. NAGA MOUNIKA
Considering the accessibility of high determination time lower-bound chart (G) which empowers us to channel in the
ward travel time information for street systems, and the arrangement of the hubs that should be investigated by the
significance of time reliance for precise and valuable way forward hunt. We clarify our bidirectional time subordinate
arranging, the requirement for productive calculations to speediest way approach that we sum up bidirectional A*
empower cutting edge time subordinate way arranging calculation proposed for static spatial systems to time
applications gets to be obvious and prompt. subordinate street systems.
Our proposed arrangement includes two stages. At the
pre-computation stage, we segment the street system into
non-covering segments and precompute lower-bound
separation marks inside and over the allotments concerning
G(V,E). Progressively, at the online stage, we utilize the pre
figured separation marks as a heuristic capacity in our
bidirectional time subordinate A* seek that performs
synchronous hunts from source and destination. As indicated
in, the time subordinate quickest way issue can be fathomed
by adjusting Dijkstra calculation. We allude to altered
Dijkstra calculation as time ward Dijkstra (TD-Dijkstra). TD-
Dijkstra visits all system hubs reachable from s in every
heading until destination hub d is come to. On the other side,
a period subordinate A* calculation can altogether lessen the
quantity of hubs that must be navigated in TD-Dijkstra
calculation by utilizing a heuristic capacity h(v) that
(a) Static path planning coordinates the inquiry towards destination. To ensure ideal
results, h(v) must be allowable and predictable ( monotonic).
The suitability infers that h(v) must be not exactly or
equivalent to the real separation in the middle of v and d.
With static street systems where the length of an edge is
steady, Euclidian separation in the middle of v and d is
utilized as h(v). Notwithstanding, this straightforward
heuristic capacity can't be specifically connected to time-
subordinate street systems, in light of the fact that, the ideal
travel-time in the middle of v and d changes taking into
account the flight time television from v.
Consequently, in time-subordinate street systems, we
have to utilize an estimator that never overestimates the
travel-time in the middle of v and d for any conceivable
television. One basic lowerbound estimator is deuc(v,
(b) Time-dependent path planning d)/max(speed), i.e., the Euclidean separation in the middle of
v and d partitioned by the most extreme rate among the edges
Fig.3. Static vs. Time-dependent path planning. in the whole system. Despite the fact that this estimator is
ensured to be a lower-bound, it is a free bound, and thus
IV. PROPOSED WORK yields immaterial pruning. With our methodology, we get a
We propose a bidirectional time subordinate quickest way much more tightly bound by using the pre figured separation
calculation (BTDFP)based on A* look. There are two marks. Accepting that an online time subordinate quickest
principle difficulties to utilize bidirectional A* seek in time way question asks for a way from source s in allotment Si to
ward systems. To start with, discovering an acceptable destination d in segment S. The speediest way must go
heuristic capacity (i.e., lower bound separation) between a through from one fringe hub bi in Si and another outskirt hub
moderate vi hub and the destination d is trying as the bj in Sj . We realize that the time-subordinate speediest way
separation between viand d changes taking into account the separation going from bi and bj is more prominent than or
takeoff time from vi . Second, it is unrealistic to execute a equivalent to the pre registered lower-bound fringe to-
regressive hunt without knowing the entry time at the outskirt (e.g., LTT (bl , bt)) separation for Si and Sj pair. We
destination. We address the previous test by parceling the additionally realize that a time dependent speediest way
street system to non-covering segments (a logged off separate from s to bi is constantly more prominent than or
operation) and precompute the intra (hub to-outskirt) and equivalent to the pre-computed lower-bound quickest way
entomb (fringe to-fringe) segment separation names separation of s to its closest fringe hub bs . Similarly, same is
regarding Lower-bound Graph G which is created by valid from the fringe hub b d(i.e., closest outskirt hub) to
substituting the edge go times in Gwith least conceivable go commotion Sj . In this manner, we can register a lower-bound
times. We utilize the blend of intra and entomb separation estimator of s by h(s) = LTT (s, bs) + LTT (bl , bt) + LTT (bd,
marks as a heuristic capacity in the online calculation. To d).
address the last test, we run the retrogressive inquiry on the
International Journal of Scientific Engineering and Technology Research
Volume.04, IssueNo.34, August-2015, Pages: 6800--6806Stochastic Based Computation for Live Traffic
Lemma 1: Given a halfway hub vi in Si and destination hub one of the hubs went to by in reverse inquiry in a set H (Line
d in Sj , the estimator h(vi) is acceptable, i.e., a lower bound 5). At the point when the inquiry outskirts meet, i.e., when N f
of time-ward quickest way separate from vi to d going from and Nb have a hub u in like manner (Line 6), the expense of
fringe hubs bi and bj in Si and Sj ,individually. the timedependent quickest way (TDFP(s, u, ts)) from s to u.
Proof. Assume LTT (bl , bt) is the base fringe to border
separation in the middle of Si and Sj , and b " I ,b " j are the
closest outskirt hubs to vi and d in G, individually. By
meaning of G(V,E), LTT (vi , b' i) ≤ TDFP(vi , bi , tvi), LTT
(bl , bt) ≤ TDFP(bi , bj , tbi), and LTT(b' j , d) ≤ TDFP(b j , d,
tbj) Then, we have h(vi) = LTT (vi , bi " )+LTT (bl , bt)+ LTT
(b " j , d) ≤ TDFP(vi , bi , tvi) + TDFP(bi , bj , tbi) + TDFP(bj ,
d, tbj)
We can utilize our h (v) heuristic with unidirectional time
dependent A* look in street systems. The time dependent A* Fig.4. Bidirectional search.
calculation is a best-first pursuit calculation which checks
hubs in view of their time-ward expense name (kept up in a As of right now, we realize that TDFP (u, d, t u) > LTT(u,
need line) to source like. he main distinction to is that the d) for the way found by the retrogressive pursuit. Thus, the
mark inside of the need line is not decided just by the time time dependent expense of the ways (discovered in this way)
dependent separation to source additionally by a lower-bound going from u is the upper-bound of the time-subordinate
of the separation to d, i.e., h(v) presented previously. To quickest way from s to d, i.e., TDFP(s, u, ts)+ TDFP(u, d, tu)
further accelerate the reckoning, we propose a bidirectional ≥ TDFP(s, d, ts).If we stop the hunts when a hub u is
pursuit that at the same time hunts forward from the source examined by both forward and in reverse quests, we can't
and in reverse from the destination until the Demonstrated, if promise discovering the time-subordinate speediest way from
v is examined before u by the forward hunt, then TDFP(s, u, u to d inside of the arrangement of hubs in H as shown in
ts) > TDFP(s, v, ts). Additionally if w is checked before u by Fig.4. This is because of conflicting potential capacity
the regressive pursuit, the LTT (u, d)>LTT(w, d) and utilized as a part of bidirectional inquiry that depends on two
consequently TDFP(u, d, tu) > TDFP(w, d, tw). Subsequently, autonomous potential capacities for two internal A*
it is conceivable that TDFP(s, u, ts) + TDFP(u, d, tu) ≥ calculations. In particular, let hf(v) (evaluated separation
TDFP(s, v, ts) + TDFP(w, d, tw). To address this test, one from hub v to target) and hb(v) (assessed separation from hub
needs to discover an) a predictable inquiry outskirts meet. Be v to source) be the potential capacities utilized as a part of the
that as it may, bidirectional inquiry is trying in time- forward and in reverse inquiries, separately. With the
subordinate street systems for two after reasons. In the first regressive hunt, every unique edge e(i, j) considered as e(j, i)
place, it is vital to begin the retrogressive inquiry from the in the converse chart where hb utilized as the potential
entry time at the destination td and definite td can't be capacity, and consequently the lessened cost3 of e(j, i) w.r.t.
assessed ahead of time at the question time (review that hb is registered by chb(j, i)=c(i, j)- hb(j)+hb(i) where c(i, j) is
landing time to destination relies on upon the flight time from the expense in the first diagram. Note that hf and hb are
the source in time-subordinate street systems). predictable if, for all edges (i, j), chf(i, j) in the first chart is
equivalent to chb(j, i) in the opposite diagram.
We address this issue by running a retrogressive A* look
that is taking into account the opposite lowerbound diagram In the event that hf and hb are not steady, there is no
G (the lower-bound chart with each edge switched). The ensure that the briefest way can be discovered when the
fundamental thought with running in reverse hunt inG is to inquiry boondocks meet. For example, consider where the
focus the situated of hubs that will be investigated by the forward and in reverse quests meet at hub u. As heuristic
forward A* look. Second, it is not direct to fulfill the capacity and stop the inquiry when the forward and in reverse
consistency (the second optimality state of A* inquiry) of pursuits meet or b) another end condition. In this study, we
h(v) as the forward and reverse inquiries use diverse build up another end condition (the confirmation of accuracy
separation capacities. Next, we clarify bidirectional time- is given underneath) in which we proceed both pursuits until
subordinate A* seek calculation (Algorithm 1) and how we the Qb just contains hubs whose marks surpass TDFP(s, u, ts)
fulfill the consistency. Given G = (V, E, T), s and d, and + TDFP(u, d, tu) by adding every single went to hub to H
flight time ts from s, let Qf and Qb speak to the two need lines (Line 9-11). Review that the mark (meant by dbv) of hub v in
that keep up the marks of hubs to be handled with forward the retrogressive inquiry need line Qb is processed when ward
and in reverse A* seek, separately. Let F speak to the separation from the destination to v in addition to the lower-
arrangement of hubs checked by the forward inquiry and N f bound separation from v to s, i.e., db v= TDFP(v, d,
is the relating situated of marked vertices (those in its need television) + h(v). Consequently, we stop the inquiry when
line). We indicate the mark of a hub in Nf by dfv. dbv> TDFP(s, u, ts) + TDFP(u, d, tu). As we clarified,
Comparably, we characterize B, Nb, and dfv for the TDFP(s, u, ts) + TDFP(u, d, tu) is the length of the speediest
retrogressive pursuit. Note that amid the bidirectional inquiry way seen as such (not so much the real quickest way) and is
F and B are disjoint yet Nf and Nb may cross. We at the same upgraded amid the pursuit when another regular hub u_
time run the forward and in reverse A* seeks on G(V, E, T) found with TDFP(s, u_, ts)+TDFP(u_, d, tu).
and G, individually (Line 4 in Algorithm 1). We keep every
International Journal of Scientific Engineering and Technology Research
Volume.04, IssueNo.34, August-2015, Pages: 6800-6806G. SRINIVASA RAO, A. NAGA MOUNIKA
Algorithm 1.B-TDFP Algorithm this way, our methodology yield an a great deal more
reasonable situation, and thus, relevant to this present reality
1. Input: GT,G, s:source, d:destination,ts:departure time. street systems. Our tests with genuine street system and
activity information demonstrated that our proposed
2. Output: a (s, d, t=) fastest path methodologies beat the rivals away and reaction time
essentially. We mean to seek after this study in two unique
3. FS():forward search, BS():backward search, bearings. To start with, we plan to examine new information
models for viable representation of spatiotemporal street
Nf/Nb: nodes scanned by FS()/BS(),dbv: label of the
systems. This is basic in supporting improvement of effective
minimum element in BS queue
and precise time subordinate calculations, while minimizing
4. FS(GT ) and BS(G) //start searches simultaneously the stockpiling and processing expenses. Second, to bolster
fast changes of the activity designs (that may happen if there
5. Nf← FS(GT ) and Nb← BS(G) should be an occurrence of mischances/occasions; for
instance), we expect to examine incremental upgrade
6. If Nf∩ Nb_= ∅then u ← Nf∩ Nb calculations for both of our methodologies.
7. M = TDFP(s, u, ts) + TDFP(u, d, tu) VI. REFERENCES
[1] Samet, H., Sankaranarayanan, J., Alborzi, H.: Scalable
8. end If network distance browsing in spatial databases. In: SIGMOD
(2008).
9. While dbv>M [2] Sanders, P., Schultes, D.: Highway hierarchies hasten
exact shortest path queries. In: Brodal, G.S., Leonardi, S.
10. Nb← BS(G) (eds.) ESA 2005. LNCS, vol. 3669, pp. 568–579. Springer,
Heidelberg (2005).
11. End While [3] Sanders, P., Schultes, D.: Engineering fast route planning
algorithms. In: Demetrescu, C. (ed.) WEA 2007. LNCS, vol.
12. FS(Nb)
4525, pp. 23–36. Springer, Heidelberg (2007).
13. return (s, d, ts) [4] Wagner, D., Willhalm, T.: Geometric speed-up
techniques for finding shortest paths in large sparse graphs.
Lemma 2: Algorithm 1 finds the correct time-dependent In: Di Battista, G., Zwick, U. (eds.) ESA 2003. LNCS, vol.
fastest path from source to destination for a given departure- 2832, pp. 776–787. Springer, Heidelberg (2003).
time ts. [5] Dreyfus, S.E.: An appraisal of some shortest-path
algorithms. Operations Research 17(3) (1969).
Proof: We demonstrate Lemma 2 by inconsistency. The [6] Dean, B.C.: Algorithms for min-cost paths in
forward pursuit in Algorithm 1 is the same as the timedependent networks with wait policies. Networks (2004).
unidirectional A* calculation and our heuristic capacity h(v) [7] Foschini, L., Hershberger, J., Suri, S.: On the complexity
is a lower bound of time-ward separation from u to v. In this of time-dependent shortest paths. In: SODA (2011).
way, the forward pursuit is right. Presently, let P(s, (u), d, t s) [8] Batz, G.V., Delling, D., Sanders, P., Vetter, C.:
speak to the way from s to d going from u where forward and Timedependent contraction hierarchies. In: ALENEX (2009).
in reverse hunts meet and ω means the expense of this way. [9] Delling, D.: Time-dependent SHARC-routing. In:
As we indicated ω is the upper-bound of real time dependent Halperin, D., Mehlhorn, K. (eds.) Esa 2008. LNCS, vol.
speediest way from s to d. Let φ be the littlest name of the 5193, pp. 332–343. Springer, Heidelberg (2008).
regressive hunt in need line Qb when both forward and in [10]Cooke, L., Halsey, E.: The shortest route through a
reverse inquiries halted. Review that we stop looks when φ > network with timedependent intermodal transit times. Journal
ω. Assume that Algorithm 1 is not right and yields an of Mathematical Analysis and Applications (1966).
imperfect way, i.e., the quickest way goes from a hub outside [11]Kohler, E., Langkau, K., Skutella, M.: Time-expanded
of the passageway produced by the forward and in reverse graphs for flow-dependent transit times. In: Proc. 10th
inquiries. Let P∗ be the speediest way from s to d for flight Annual European Symposium on Algorithms (2002).
time ts and expense of this way is α. Let v be the first the [12]George, B., Kim, S., Shekhar, S.: Spatio-temporal
retrogressive pursuit and hb(v) is the heuristic capacity for the network databases and routing algorithms: A summary of
regressive inquiry. Henceforth, we have φ ≤ hb(v) +LTT (v, results. In: Papadias, D., Zhang, D., Kollios, G. (eds.) SSTD
d), α ≤ ω < φ and hb(v)+ LTT (v, d) ≤ LTT (s, v)+ LTT (v, d) 2007. LNCS, vol. 4605, pp. 460–477. Springer, Heidelberg
≤ TDFP(s, v, ts)+TDFP(v, t, television) = α, which is an (2007).
inconsistency. Consequently, the speediest way will be found [13]Halpern, J.: Shortest route with time dependent length of
in the hall of the hubs named by the backward search. edges and limited delay possibilities in nodes. Mathematical
Methods of Operations Research (1969).
V. CONCLUSION AND FUTURE WORK [14]Orda, A., Rom, R.: Shortest-path and minimum-delay
We proposed a period subordinate quickest way calculation algorithms in networks with time dependent edgelength. J.
taking into account bidirectional A*. Not at all like the most ACM (1990).
way arranging studies, we accept the edge weights of the
street system are time differing as opposed to consistent. In
International Journal of Scientific Engineering and Technology Research
Volume.04, IssueNo.34, August-2015, Pages: 6800--6806Stochastic Based Computation for Live Traffic
[15]Kanoulas, E., Du, Y., Xia, T., Zhang, D.: Finding fastest
paths on a road network with speed patterns. In: ICDE
(2006).
[16]Ding, B., Yu, J.X., Qin, L.: Finding time-dependent
shortest paths over large graphs. In: EDBT (2008)
[17]Dehne, F., Omran, M.T., Sack, J.-R.: Shortest paths in
time-dependent fifo networks using edge load forecasts. In:
IWCTS (2009).
[18]Goldberg, A.V., Harellson, C.: Computing the shortest
path: A* search meets graph theory. In: SODA (2005).
[19]Delling, D., Wagner, D.: Landmark-based routing in
dynamic graphs. In: Demetrescu, C. (ed.) WEA 2007. LNCS,
vol. 4525, pp. 52–65. Springer, Heidelberg (2007).
[20]Nannicini, G., Delling, D., Liberti, L., Schultes, D.:
Bidirectional a* search for time dependent fast paths. In:
McGeoch, C.C. (ed.) WEA 2008. LNCS, vol. 5038, pp. 334–
346. Springer, Heidelberg (2008)
[21]Potamias, M., Bonchi, F., Castillo, C., Gionis, A.: Fast
shortest path distance estimation in large networks. In: CIKM
(2009).
[22]Demiryurek, U., Kashani, F.B., Shahabi, C.: A case for
time-dependent shortest path computation in spatial
networks. In: ACM SIGSPATIAL (2010).
[23]Guc, B., Ranganathan, A.: Real-time, scalable route
planning using stream-processing infrastructure. In: ITS
(2010).
[24]Hart, P., Nilsson, N., Raphael, B.: A formal basis for the
heuristic determination of minimum cost paths. IEEE
Transactions on Systems Science and Cybernetics (1968).
[25]Pohl, I.: Bi-directional search. In: Machine Intelligence.
Edinburgh University Press, Edinburgh (1971).
Author’s Profiles:
G.Srinivasa Rao received his MCA
degree from JNTUK and M.Tech(IT) from
Punjabi University. Currently he is
working in Sri Vasavi Engineering College
as Associated Professor for MCA&IT. He
is interested in information security and
Networking.
A.Naga Mounika pursuing Master of
Computer Applications in Sri Vasavi
Engineering College, Tadepalligudem,
West Godavari, A.P, India.
International Journal of Scientific Engineering and Technology Research
Volume.04, IssueNo.34, August-2015, Pages: 6800-6806You can also read

















































