B2D2 - A REXUS experiment to demonstrate the deployment of a bi-stable composite boom
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

EPSC Abstracts Vol. 14, EPSC2020-1115, 2020, updated on 13 Aug 2021 https://doi.org/10.5194/epsc2020-1115 Europlanet Science Congress 2020 © Author(s) 2021. This work is distributed under the Creative Commons Attribution 4.0 License. B2D2 – A REXUS experiment to demonstrate the deployment of a bi-stable composite boom Kaushik Iyer, Mathias Axelsson, Jordi Boldu, Max Eichenberger, Adrien Engrand, Frederik Haider, Suzanne Herzog, Albert Jansson, Sara Ghika, Danai Katrali, Stefano Bassoli, Nickolay Ivchenko, and Gunnar Tibert KTH Royal Institute of Technology, Stockholm Abstract The Bistable Boom Dynamic Deployment (B2D2) project is an experiment scheduled to be launched on the RX30 Rocket in March 2021 which aims to demonstrate high quality measurements of the Earth’s magnetic field using a self-deployable boom carrying two magnetometers. As part of the REXUS/BEXUS student programme, the project aims to develop an ejectable Free Falling Unit (FFU) containing a magnetometer boom, a recovery unit and other required instrumentation. Since the magnetometer boom is intended to be used in a low gravity environment, low gravity testing is essential to help qualify it for further research and future space missions. The time history of magnetic field vectors from both magnetometers, the attitude of the FFU and the raw GPS data will be recorded. These will be used to reconstruct measurements of the Earth’s magnetic field within an accuracy of 50 nT as compared to magnetic field model calculations and ground based measurements. The successful demonstration of the boom will help qualify it for further research and future space missions. This project is being conducted by a team of students from KTH Royal Institute of Technology with the goal of familiarising themselves with applied space missions as a preparation for a future in the space industry. Introduction Astronomical bodies like asteroids and meteorites are remains of the creation of the solar system they are embedded in. Celestial bodies such as these can be observed and studied by investigating their magnetic fields. Most planets and celestial bodies have a magnetic field surrounding them and accurate measurements of these magnetic fields would result in important inferences regarding their mass, material composition, physical properties, etc. However, magnetic interference from various other electronics in a measurement system is one of the major hindrances in producing accurate measurements using sensitive magnetometers. To avoid such interference, extensible booms are often used in CubeSats and small satellites which create a distance between the magnetic sensors and other electronic equipment. Qualification of such a boom requires a low gravity environment which would be provided by the REXUS 30 Improved Orion Rocket as part of the REXUS/BEXUS student programme. The REXUS/BEXUS programme is realised under a bilateral Agency Agreement between the German
Aerospace Center (DLR) and the Swedish National Space Agency (SNSA). The Swedish share of the payload has been made available to students from other European countries through the collaboration with the European Space Agency (ESA). Experts from DLR, SSC, ZARM and ESA provide technical support to the student teams throughout the project. EuroLaunch, the cooperation between the Esrange Space Center of SSC and the Mobile Rocket Base (MORABA) of DLR, is responsible for the campaign management and operations of the launch vehicles. Deriving from research in the field of experimental space physics at KTH Royal Institute of Technology, Stockholm, and by adapting heritage equipment from previous REXUS teams from KTH, we aim to perform high quality measurements of the Earth magnetic field using dual fluxgate magnetometers placed on a self-deployable bi-stable composite boom. The central part of the experiment is a 1.5 U cubesat shaped Free Falling Unit (FFU) which is stowed inside a REXUS rocket cylindrical module. This 220 mm long rocket module also includes a camera, an electronics box which interfaces with the rocket, and the ejection mechanism which would eject the FFU at an approximate altitude of 57 km. This ejection mechanism is adapted from the design of the TUPEX 7 REXUS team [1]. The FFU is composed of two distinct units: The Experiment Unit, which houses the experiment electronics and the Magnetometer Boom Assembly, and the Recovery Unit, which houses the parachute and the localization system to aid in the recovery of the FFU after landing. Figure 1 shows the FFU during ejection from the rocket module. Post ejection, the FFU will be stabilized using an Attitude determination and control system and will deploy the composite boom at an approximate altitude of 73 km. The magnetometers will record their measurements and store it in an onboard memory card. Upon re-entry, at an altitude of about 5 km, the recovery unit will deploy its parachute and the localization beacon will be activated. The FFU will be recovered and its data will be used for further analysis and other outreach purposes. Figure 1: FFU ejected from the Rocket Module The Magnetometer Boom Assembly, contains the self-deployable composite boom and dual fluxgate magnetometers. The purpose of the boom assembly is to separate the magnetometers from the rest of the experiment electronics, and thus, minimize the magnetic interference in the measurements.
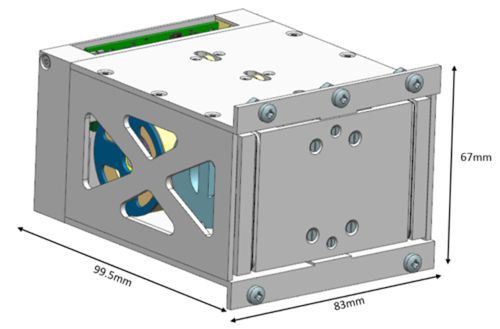
The boom assembly consists of 3 components: the plates which carry the magnetic sensors, the tape springs which provide the energy for self deployment, and the magnetometers which are placed on the base and the tip plates. The tape springs are bi-stable, which means they are stable in their coiled and deployed positions. The entire boom assembly is intended to be approximately 2 metres in length. This concept of a Magnetometer Boom Assembly is being developed according to ECSS mechanisms standards. Figures 2 and 3 show the MBA in its deployed and stowed configuration respectively. Figure 2: MBA deployed Figure 3: MBA stowed References [1] TUPEX-7, “Student Experiment Documentation v4.0,” Dec. 2019. [2] Mao, H., Ganga, P. L., Ghiozzi, M., Ivchenko, N., and Tibert, G., “Deployment of Bistable Self- Deployable Tape Spring Booms Using a Gravity Offloading System,” Journal of Aerospace Engineering, vol. 30, 2017, p. 04017007. [3] Forslund, Å., Belyayev, S., Ivchenko, N., Olsson, G., Edberg, T., and Marusenkov, A., “Miniaturized digital fluxgate magnetometer for small spacecraft applications,” Measurement Science and Technology, vol. 19, 2007, p. 015202. [4] Ivchenko, N., and Tibert, G., “SOUNDING ROCKET EXPERIMENTS WITH EJECTABLE PAYLOADS AT KTH,” 21st ESA Symposium European Rocket & Balloon Programmes and Related Research, Oct.
2013.
[5] Sa, “Home,” Rexus/Bexus Available: http://rexusbexus.net/.
Powered by TCPDF (www.tcpdf.org)You can also read

















































