Development of Intelligent Floor Cleaning Robot - IOPscience
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Journal of Physics: Conference Series
PAPER • OPEN ACCESS
Development of Intelligent Floor Cleaning Robot
To cite this article: S Yatmono et al 2019 J. Phys.: Conf. Ser. 1413 012014
View the article online for updates and enhancements.
This content was downloaded from IP address 46.4.80.155 on 11/02/2021 at 23:46
ICE-ELINVO 2019 IOP Publishing
Journal of Physics: Conference Series 1413 (2019) 012014 doi:10.1088/1742-6596/1413/1/012014
Development of Intelligent Floor Cleaning Robot
S Yatmono, M Khairudin, H S Pramono and A Asmara
Electrical Engineering Education Department, Universitas Negeri Yogyakarta,
Yogyakarta, Indonesia
E-mail: s_yatmono@uny.ac.id
Abstract. Cleaning the floor from dust is one of the routine activities carried out every day. This
activity is not only at home but also in offices or shopping centers. Sometimes due to dust
cleaning activities take a long time then there are other activities that are overlooked. For this
reason, we are trying to develop a smart floor cleaning robot that can navigate, clean dust, and
polish floors automatically. The study was conducted using Pressman's research and
development methods which included the following phases: analysis, design, implementation
and testing. The robot, developed using an omniwheel wheel and is equipped with a vacuum
cleaner and floor polishing motor. The control system used is based on the Arduino
microcontroller, the robot is also equipped with a Bluetooth communication system so that it can
be controlled via an Android smartphone. The developed robot is able to move according to
navigation controls via an android smartphone. Besides this robot is also able to move to avoid
obstacles if the distance between the robot and the barrier is less than 15 cm. Floor cleaning
performance on various types of dirt is quite good with only leaving dirt on the floor less than
20%.
1. Introduction
Cleaning the floor from dust is one of the routine activities carried out every day. This activity is not
only at home but also in offices and shopping centers. Sometimes because the activity of cleaning the
floor takes a long time then there are other activities that are overlooked. Floor cleaning activities in
public spaces even have to be done all the time is not enough to be scheduled in the morning or evening,
this requires the janitor to always be ready at all times to clean the floor.
Various types of technology have been created to facilitate human activities in their work every day.
One of them is the technology developed in robotics technology. Robots are able to replace human
activities that regularly or occasionally have to be done at unscheduled times. In terms of cleaning the
floor, it is necessary to develop robots as a substitute for floor cleaning officers.
In 2002 in the United States a robot named Roomba was developed. Roomba's automatic robot
vacuum cleaner is produced by iRobot. Introduced in September 2002, Roomba has several sensors that
enable it to do the job of cleaning the floor. For example, Roomba is able to change direction when
facing obstacles and detect dirty spots on the floor. But there are some things that need to be improved
from Roomba's robot, which is because the robot's body is circular, there are some points on the corner
of the floor that cannot be reached. Moreover, this Roomba robot can only suck up dust and does not
have components that polish the floor so that there are still dirty stains on the floor left behind.
Content from this work may be used under the terms of the Creative Commons Attribution 3.0 licence. Any further distribution
of this work must maintain attribution to the author(s) and the title of the work, journal citation and DOI.
Published under licence by IOP Publishing Ltd 1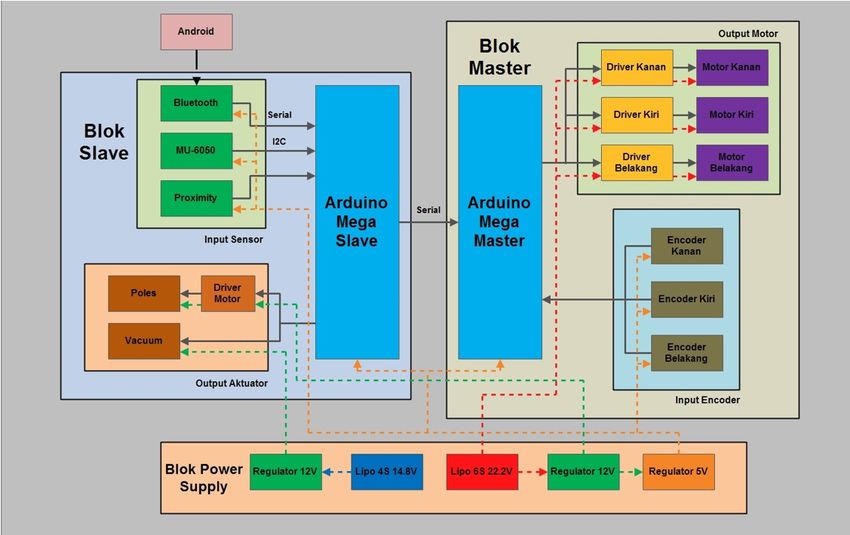
ICE-ELINVO 2019 IOP Publishing
Journal of Physics: Conference Series 1413 (2019) 012014 doi:10.1088/1742-6596/1413/1/012014
Ajay P John (2017) makes Arduino-based floor cleaning robots and is controlled using a GSM
telephone[4]. In that study, the robot that was developed was equipped with a vacuum cleaner motor,
sensors and control systems based on SMS messages from mobile phones. After receiving a message to
turn on the robot, the robot will move forward and if there is a barrier in front of the robot will turn right.
The robot will rotate 180 degrees and move forward if it does not receive navigation control messages
so robot's navigation controls are inflexible. The robot will stop if there is a Stop message from a GSM
mobile phone.
Departing from this, in this study developed an intelligent robot floor cleaners shaped box with an
obtuse angle at the edges so that it can reach a wider angle of space. In addition to the motor is attached
to a vacuum cleaner, a robot developed also include floor polishes motors so that not only vacuuming
but also clean the stain. Developed operating mode there are two moving robot automatically follow the
pattern already set and will navigate with the aid of ultrasonic sensors to avoid obstacles and semi-
automatic mode with the help of Android smartphone based control. The communication system
developed using Bluetooth and come with Android GUI display that can be easily operated via Android
smartphones.
2. Research Method
The development of floor cleaning robot using research and development (R & D) method, which refers
to the method developed by Pressman[6]. The stages that must be passed are: analysis, design,
implementation and testing. Analysis phase is to identify and obtain data about the needs of what is
required in the design and implementation of systems.
a. Analysis of user needs, analysis of what needs are needed by users to be applied to the robot
system that was developed such as a vacuum cleaner, motor polish, and robot navigation
control components.
b. Job analysis, i.e. analysis of data performance to be carried out by the system to be designed.
c. Data analysis, i.e. analysis of what data will be processed either as input or as an output.
d. Technology analysis, i.e. analysis of what technology will be used in the system to be
designed.
Design is the stage carried out to achieve the most effective and efficient system implementation
with the help of data obtained at the analysis stage. In the design we will get a framework for
implementing the system. There are several stages in design, namely:
a. The design of a mechanical system consisting of a robot body chassis, a controller module, a
Bluetooth module and a smartphone interface with Arduino.
b. The design of electronic circuits that will be used in the design of robot motion navigation
systems.
c. Program flowchart design is a chart with special symbols that describe the sequence of
processes and the relationships between processes in detail in an Arduino-based robot control
program. In this case also made an Android-based GUI programming application design.
Implementation is the stage of translating the design into an actual circuit. The design of the
placement of the wheel motor, vacuum cleaner and polishing motor are arranged in the most optimal
placement configuration. Supporting circuits such as Arduino microcontroller circuits, motor drivers,
and Bluetooth receivers are placed in the robot's body without disturbing the robot's movements. The
implementation of the Android-based robot navigation control application is also made as needed.
Hardware testing is done by activating the robot's navigation sensor (ultrasonic sensor) and then
measuring the distance of the robot's navigation barriers which are then compared to a predetermined
distance, whether the distance obtained is still within the specified tolerance limits. The next test is the
Omni Wheel Control Performance Test, Vacuum Cleaner Performance Test, and Floor Polish
Performance Test.
Software testing is the process of implementing a program to find errors. Before a program is
implemented, it must be error free. Therefore, the program must be tested to find errors that might occur.
Testing is done for each module and continued with testing for all modules that have been assembled.
2ICE-ELINVO 2019 IOP Publishing
Journal of Physics: Conference Series 1413 (2019) 012014 doi:10.1088/1742-6596/1413/1/012014
3. Result and Discussion
The results of the analysis of the needs of the floor cleaning robot system developed include:
a. Robot can work with maneuvering in all directions with the conditions of various shapes of
the room
b. Robots that are built have a cleaning system in the form of polishing machines and vacuum
cleaners
c. The robot motor operates with a 12V DC voltage
d. Minimum battery voltage of 12 V with a current of 20Ah
e. Wireless control is needed to reach in all directions
The hardware and software design developed in the floor cleaning robot includes the design of
locating the drive wheel, vacuum cleaner motor and floor polish. It also developed the design of
Bluetooth communication devices between robots and smartphones along with the design of the Android
application interface.
Robot drive wheel consists of three motors that form a triangular configuration. The motor is placed
at the end of the triangle to move the angle of the omniwheel wheel so it is easy to move. The design of
the placement of the robot motor is shown in Figure 1.
Z
X
Y
Figure 1. The design of robot’s wheels placement
The results of the placement of the wheel design are also used as a reference to place a vacuum
cleaner and motor polish. The placement of the vacuum motor and the polishing motor are placed on
the back or base of the triangle from where the wheels are placed. A vacuum cleaner is placed in front
of two polishing motors so that the floor is free of dust before being polished by a polishing motor. The
results of the placement of the motor wheel, motor vacuum cleaner and second floor polisher motor are
shown in Figure 2.
Wheel drive
motor
Vacum cleaner
Polish motor
Figure 2. The design of the vacuum motors and polishes
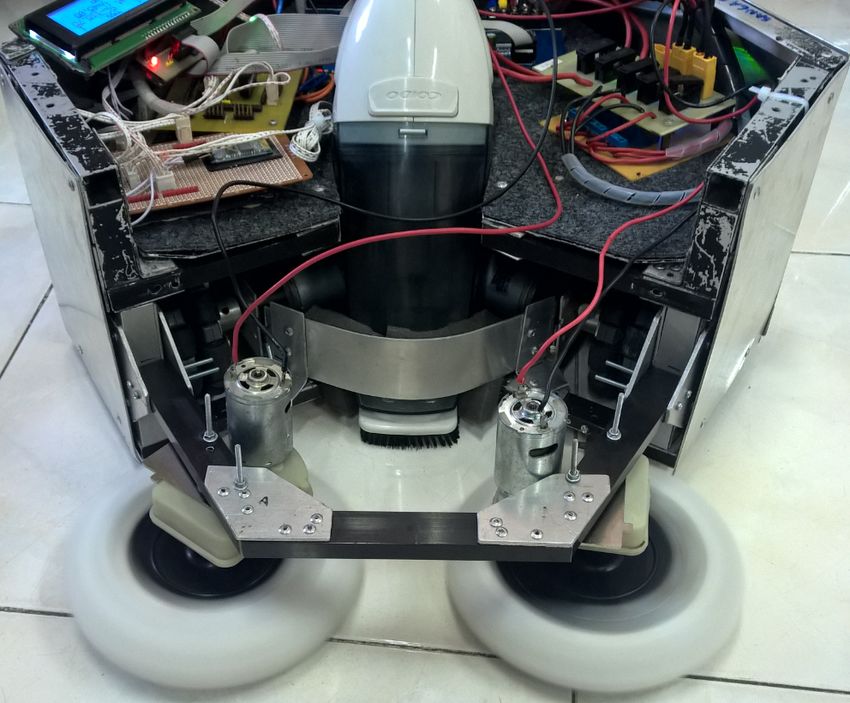
In accordance with the results of the design, implementation placement of wheel drive motors,
vacuum cleaner and the polisher motor can be seen in Figure 3.
3ICE-ELINVO 2019 IOP Publishing
Journal of Physics: Conference Series 1413 (2019) 012014 doi:10.1088/1742-6596/1413/1/012014
Figure 3. Display layout robot motors
The hardware placement such as the Arduino microcontroller circuit, motor driver, LCD, and power
supply are designed so that together the Bluetooth receiver is divided into two sub-systems. The first
system is the master block which consists of Arduino control, rotary encoder input and wheel motor.
While the second sub-system is a slave block consisting of Arduino control, sensors, Bluetooth
communication, motor polish and vacuum cleaner. The component placement scheme design can be
seen in Figure 4.
Figure 4. Design series robotic system
The implementation of robot motion control application design uses an Android-based application
that is based on predetermined needs. There are two system condition settings that must be met for the
application to function properly. The first arrangement is determining the length and area of the room
to be cleaned. The second is the determination of buttons to control the direction of movement and
activate vacuum and polish. Implementation of the appearance of the developed Android application
can be seen in Figure 5.
Figure 5. Display Android app
4ICE-ELINVO 2019 IOP Publishing
Journal of Physics: Conference Series 1413 (2019) 012014 doi:10.1088/1742-6596/1413/1/012014
The results of hardware and software implementation of floor cleaning robots are tested using the
blackbox testing method. System function tests and floor cleaning robot movements are performed via
an Android-based control application input. The test is carried out on the basis of the robot's navigation
movement that is forward, backward, right and left shear and motor pole activation. Test results are
shown in Table 1.
Table 1. Functional test application button
Result
Button Action
1st 2nd 3th 4th 5th
The robot moves forward by
Forward always maintaining heading 0 Ok Ok Ok Ok Ok
degrees
The robot moves backward by
Backward always maintaining heading 0 Ok Ok Ok Ok Ok
degrees
The robot moves swipe right by
Swipe right always maintaining heading 0 Ok Ok Ok Ok Ok
degrees
The robot moves swipe left by
Swipe left always maintaining heading 0 Ok Ok Ok Ok Ok
degrees
rotate right and when stopped
turn right Ok Ok Ok Ok Ok
will set heading 0 degrees
rotate left and when stopped will
turn left Ok Ok Ok Ok Ok
set heading 0 degrees
turn on the arduino and bluetooth
power on Ok Ok Ok Ok Ok
systems
turn on and off vacum cleaner and
On /Off motor Ok Ok Ok Ok Ok
polish motor
The experimental results show that the robotic navigation control can run well according to the
keypress input developed on the Android application. During the five trials showing the same thing, the
robot movement was observed in accordance with the specified key control function. Full activation of
the motor and polishing system also gets the same result that the main system and the vacuum motor
can be turned on and off remotely via the Android application control button.
The next test results are the results of the robot motion algorithm test if it finds a barrier in front of
the robot. In accordance with the algorithm that has been implanted in the robot's slave motor control
block, then if during moving the robot finds objects that block its movement, then the robot will move
to avoid these obstacles. Table 2 shows the results of testing the robot maneuvering movement towards
the presence of solid objects.
Table 2. Test distance of barrier
Barrier Distance Test Result Maneuver
5 cm able to avoid move to the left of the barrier
10 cm able to avoid move to the left of the barrier
15 cm able to avoid move to the left of the barrier
20 cm can't escape
25 cm can't escape
30 cm can't escape
35 cm can't escape
40 cm can't escape
The test results show that the robot will detect the distance of the object between the front of the
robot and the barrier. If the distance of the barrier object is still more than 15 cm, then the robot will
move straight ahead. If the detected distance is less than 15 cm the robot will move to the left of the
5ICE-ELINVO 2019 IOP Publishing
Journal of Physics: Conference Series 1413 (2019) 012014 doi:10.1088/1742-6596/1413/1/012014
barrier. The results of this test are carried out if the robot uses an automatic control mode based on
ultrasonic sensor data placed on the robot's body.
Subsequent tests were carried out to get the performance of the floor cleaning robot. Testing is done
by putting a kind of dirt in front of the robot. Performance test results obtained are shown in Table 3
below.
Table 3. Test performance floor cleaning robot
Type of Dirt Before Result After
suck less power
Dust so there is still
dust left
suck less power
Sand so there is still
sand left
suck less power
Paper so there is still
paper left
suck less power
Carpet fur so there is still
fur left
The results of the floor cleaning robot performance tests on the types of impurities such as dust, fine
sand, pieces of paper and fur rugs show good results. There is still some dirt left after the cleaning robot
has passed the floor. This is possible because the motor power is not strong enough. In addition, there
is no algorithm to detect the presence of dirt that is still left on the floor. However, based on observations
of the pictures shown in Table 3, it shows that the amount of dirts left is only around less than 20% .
The test results, can be used as a basis for stating the performance and specifications of the floor
cleaning robot that has been developed. Based on the results of tests that have been done, the floor
cleaning robot specifications developed in this study have the following product specification values:
• Weight robot: 10.2 kg
• Size Length, width, height robot: 55cm x 48cm x 36cm
• Robot battery capacity: 5200mAh LiPo 4S and 6S LiPo 5200mAh
• The ability of the robot working life time: ± 45 minutes
• Total current consumption of the robot: Motor 2A
• The current consumption control system and sensor 2A
• Polishing motor current consumption 4A (2 x 2A) + Vacuum 8A = 16A
• Robot Working Voltage: Motor 24Volt,
• Working Voltage Vacuum and Polishing 12volt, control systems and sensors 5volt
6ICE-ELINVO 2019 IOP Publishing
Journal of Physics: Conference Series 1413 (2019) 012014 doi:10.1088/1742-6596/1413/1/012014
4. Conclusion
Based on the results of the design and testing of the floor cleaning robot system developed, it can be
concluded as follows:
a. Floor cleaning robot consists of hardware which is composed of a series of robot control and
mechanical components and Android application software as a robot motion controller. The robot
control hardware component consists of two master and slave sub-systems, each of which consists
of an Arduino control component, sensors as inputs and motor drivers. The motor wheel is controlled
by the master block and the cleaner and polishing motor are controlled by the slave block.
b. Android's performance as a manual robot controller can function according to the set of buttons. To
use the automatic mode the ultrasonic sensor robot can avoid obstacles with an object distance of
less than 15 cm.
c. Floor cleaning performance for various types of dusty dirt, fine sand, pieces of paper and fur carpet
shows that the remaining less than 20% of the dirt on the floor.
5. References
[1] Anonymous, Built-in Examples, Arduino.cc, 2017
[2] Hari Santoso, Arduino Practical Guide for Beginners, www.elangsakti.com , 2015
[3] Hari Santoso, Monster Arduino, www.elangsakti.com, 2017
[4] John, Ajay P, Implementation of an Automated Smart Robotic Floor Cleaner, International
Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering Vol. 6,
Issue 4, April 2017
[5] Singh, Satyinder, Robotic Vacuum Cleaner, International Journal of Engineering Science and
Computing, May 2017
[6] Pressman, Roger S., "Software Engineering: a practitioner approach (Book 1)", Andi,
Yogyakarta, 2002
[7] Shemanuev, Evgeny, Manage the Arduino-robot using the G-sensor on your smartphone,
remotexy.com, 2017
7You can also read