IMPROVED ACCURACY OF VEHICLE COUNTER FOR REAL-TIME TRAFFIC MONITORING SYSTEM - Sciendo
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Transport and Telecommunication Vol. 21, no.2, 2020
Transport and Telecommunication, 2020, volume 21, no. 2, 125–133
Transport and Telecommunication Institute, Lomonosova 1, Riga, LV-1019, Latvia
DOI 10.2478/ttj-2020-0010
IMPROVED ACCURACY OF VEHICLE COUNTER FOR
REAL-TIME TRAFFIC MONITORING SYSTEM
De Rosal Ignatius Moses Setiadi1, Rizki Ramadhan Fratama2,
Nurul Diyah Ayu Partiningsih3
1,2,3
Department of Informatics Engineering, Dian Nuswantoro University
207 Imam Bonjol Street, Semarang 50131, Indonesia
1
moses@dsn.dinus.ac.id, 2riskiramadhan0397@gmail.com, 3nuruldyah35@gmail.com
This research proposes a background subtraction method with the truncate threshold to improve the accuracy of vehicle
detection and tracking in real-time video streams. In previous research, vehicle detection accuracy still needs to be optimized, so it
needed to be improved. In the vehicle detection method, there are several parts that greatly affect, one of which is the thresholding
technique. Different thresholding methods can affect the results of the background and foreground separation. Based on the results
of testing the proposed method can improve accuracy by more than 20% compared to the previous method. The thresholding
method has a considerable influence on the final result of vehicle object detection. The results of the average accuracy of the three
types of time, i.e. morning, daytime, and afternoon reached 96.01%. These results indicate that the vehicle counting accuracy is very
satisfying, moreover, the method has also been implemented in a real way and can run smoothly.
Keywords: Traffic Monitoring, Background Subtraction, Truncate Threshold, Real-time tracking, Vehicle Detection
1. Introduction
Technology in the world of transportation has been advancing in the last few decades. Currently,
computer vision has been implemented in intelligent transportation systems (ITS)(Gaidash & Grakovski,
2016) to process video data that is usually taken from CCTV. CCTV installed on the streets to monitor
traffic in an integrated place to facilitate the authorities in managing traffic in the region. From this
transportation, data can be used to make regulations and new rules to overcome transportation problems,
such as traffic jams and traffic violations (Moutakki et al., 2017; Setiadi et al., 2019; Sun et al., 2017).
From year to year the number of motorized vehicles in the world is increasing (Sperling & Gordon,
2008), even in some countries such as China, Indonesia, and India, the number of motor vehicles has
more than doubled in a decade (Davis et al., 2018). Congestion is one of the problems experienced in
many countries due to the increase in the number of motorized vehicles that are not matched by the
increase inroads. In a country with a high population density and weak rules for private vehicle
ownership, sales of new vehicles continue to increase while old vehicles are still being used, so that the
streets are increasingly congested and add to the points of congestion. Indonesia is the fourth most
populous country in the world, with a population of more than 260 million in 2018(Badan Pusat Statistik,
2020), while the number of motor vehicles reached 138 million in 2017 whereas in 2007 there were no
more than 62 million, this means an increase in the number of vehicles which was very significantly more
than doubled (Badan Pusat Statistik, 2017).
Particularly in the problem of congestion, statistical data on the level of traffic density is needed by
observing the number of vehicles that pass the road, thus it can be used to determine policies for open and
close access or to determine the length of red and green lights to reduce traffic congestion. This
observation was initially done manually, but with the development of existing technology, observations
can be made automatically using certain methods. Previous research has discussed how to detect,
motorized vehicles that cross the highway. You do this by processing video data taken from cameras
mounted on the streets. In some of these studies the background subtraction method is used (Barcellos et
al., 2015; Mandellos et al., 2011; Moutakki et al., 2017; Setiadi et al., 2019), even the classification of
vehicle types was also carried out in research (Arinaldi et al., 2018). Background subtraction is a method
that is done by comparing the background image with the image produced from the frame by frame video
to detect the value of moving pixels (Bouwmans et al., 2019; Yang & Pun-Cheng, 2018). One application
that is useful for building intelligent transportation systems to help overcome congestion is vehicle
125
Transport and Telecommunication Vol. 21, no.2, 2020
counting (Barcellos et al., 2015; Moutakki et al., 2017; Setiadi et al., 2019; Sun et al., 2017). The
counting process can be done by starting the process of vehicle detection, tracking, and counting. Many
things are very influential on the accuracy of vehicle counting results, i.e. video input quality, pre-
processing, detection and classification of vehicle, the tracking vehicle, and the counting process. Internet
speed, camera location, road density, video resolution, road contours (straight or winding or at an
intersection), vehicle speed, light intensity due to changes in time (morning or day time or afternoon) and
weather are also things that are greatly affect accuracy when the application is actually implemented later,
although this will give researchers a challenge to improve accuracy.
2. Related Work
In the research conducted by (Barcellos et al., 2015) the vehicle counting method is proposed with
the main stages of the process of reading the video and frame foreground, followed by obtaining particles
or objects, afterward, it is carried out with the region verification process. The segmentation process to
get the foreground scene is done by the Gaussian mixture model method, at the end of this process we
will get particles to be processed at the clustering stage. In the clustering process, the k-means method is
used to obtain three types of regions, i.e. regions with unlabeled particles, regions with labeled particles
and vehicle regions. Regions with unlabeled particles are carried out with initial clustering, cluster
splitting, cluster merging, and vehicle detection, then they will be verified until they are labeled with an
iterative process, while regions with labeled particles are carried out with the same process without
passing through initial clustering. Whereas the detection of the vehicle region will be carried out by
looking at the labeled particles which are assumed to be vehicles, their characteristics are the particles that
are close to each other, moving congenial, but this is not necessarily directly considered as a vehicle
region, a verification process needs to be done its characteristics by measuring its area, location, and
shape of the cluster. Then in the tracking and counting stages, the vehicle region will be checked whether
moving through the specified line will be counted as a vehicle. This research conducted experiments on
six types of offline videos where the proposed method has the most accurate calculation results when
compared with previous research, namely 1096 of the original value of 1081 but there are 40 vehicles that
were not detected correctly and 55 vehicles were detected twice.
Other research conducted by (Sun et al., 2017) proposed a traffic counting method using a multi-
channel and multi-task convolutional neural networks (CNN) network method on still images. In this
way, not only vehicles that pass but vehicles that are parked or may break down in the middle of the road
will be detected. This idea is very good because congestion is not only caused by the volume of vehicles
that pass a road but with a car parked on the road or maybe a car that might strike in the middle of the
road can make traffic flow stagnate. Some important steps proposed in this method begin with RGB
image input and then converted into two images, namely grayscale and illumination invariance. Then the
learning process, classification and finally the vehicle calculation data and density level are generated.
This research also used the camera display classification to improve method performance. Experiments
carried out on the extraction of images from many videos in the city, wherefrom the sample data all use
images and then traffic on relatively straight roads. Experiment results show an increase in accuracy
based on calculating the absolute deviation and relative deviation values.
The two studies above are not done in real-time and certainly require relatively heavier computing
because there is a clustering process in research (Barcellos et al., 2015) and the classification process in
research (Sun et al., 2017). Implementing traffic counting on real-time video is certainly more challenging.
The conclusions from the two studies above also stated that in future research it is necessary to implement
the method in real-time video. This is certainly more complex and must pay attention to the
computational time needed, the proposed method must also be wiser because more things need to be
considered, so it may be necessary to trim the algorithm that has no significant effect. In research
conducted by (Moutakki et al., 2017) vehicle counting method is implemented in the GRAM Road-
Traffic Monitoring dataset which is designed for real-time video. In this research, it is proposed that
occlusion handling is applied to improve the accuracy of vehicle classification based on the background
subtraction method using the codebook model. There are three main stages in this research, namely the
process of segmentation, classification and counting. The segmentation process is used to search for the
region of interest (ROI) at this stage the background subtraction, filtering and contour detection methods
are used. At the classification stage, histogram of oriented gradient (HOG) and support vector mechine
(SVM) are used which are associated with occlusion method horizontally and vertically. At the last stage,
vehicle counting is done when the object moves through the specified zone. Experiments carried out on
the GRAM Road-Traffic Monitoring dataset, which obtained detection accuracy of 99.45%.
126
Transport and Telecommunication Vol. 21, no.2, 2020
Other studies conducted by (Setiadi et al., 2019) In this research a real-time vehicle counting
system was built based on inputs from CCTV from the Semarang City, Indonesia Transportation Agency
(DISHUB). The system is built based on web applications with the Python programming language. Flask
microframework is also used to process video streaming as input and display on the system. Background
subtraction is a segmentation method used to detect vehicles. In detail, the process of segmentation after
background subtraction is thresholding using a binary model, the erosion and the dilation process. Then
the object is detected using region bound based on the chain code method, then the detected object is
marked with active contour. Then the object tracking process is carried out to do the counting process
when passing the specified path. Based on testing, the proposed method only produces an accuracy of
71.38%. This is caused by many factors because this application is implemented in realtime. In addition
to the need for improved methods, CCTV placement factors, video quality, and internet connections are
very influential matters. The location of CCTV in the area of Tugu Muda Semarang, Indonesia, monitors
the road that has five intersections with very high-density levels at certain hours. From some of the
related research above, this research will propose an increase in vehicle counter accuracy using the
background subtraction method in real-time traffic monitoring.
3. Proposed Method
This research was built to improve the accuracy of the real-time traffic monitoring system that was
proposed earlier by (Setiadi et al., 2019), where the proposed method is background subtraction as the
main method in the segmentation stage. This method is also still widely proposed in various researches in
the last five years as in research (Fernández-Sanjurjo et al., 2019; Huang et al., 2017; Moutakki et al.,
2017; Pun & Lin, 2016). In several articles a review of object detection especially vehicles written by
(Bouwmans et al., 2019; Yang & Pun-Cheng, 2018) it is said that the determination of the threshold is
one of the things that greatly influence the results of background and foreground separation in the
background subtraction method. Where the pixel value is greater than the threshold will be detected as a
foreground area and vice versa is detected as a background area so that it will produce objects that will be
detected in binary images. In this case, the foreground area is a candidate for the vehicle object. The
quality of the results of the segmentation will determine the accuracy of detection, so in this research, the
use of the Threshold method will be modified. In detail, the stages of the proposed method will be
described in Figure 1.
Access the CCTV URL
Split video frame
by frame Perform background
subtraction on each frame
using truncate thresholding
Perform dilation to Perform erosion to
emphasize the object minimize noise
shape
Use active contour and chain
code to detect objects
Performs object tracking
Perform counting if the object
passes the specified path
Figure 1. Proposed method
127
Transport and Telecommunication Vol. 21, no.2, 2020
4. Implementation and Analysis
At the implementation stage, the application is built using the Python programming language and
OpenCV as a tool, the video is taken directly from the CCTV of the Dinas Perhubungan (DISHUB)
Semarang City located in the area around Tugu Muda when viewed on google maps located at the point
(-6.984394, 110.409470). Please note that this area has an intersection that connects five main roads in the
Semarang city, i.e. Pemuda, Imam Bonjol, Mgr. Soegijapranata, Pandanaran, and dr. Sutomo. Figure 2 is a
description of the traffic around the Tugu Muda area and one of the capture frames taken from CCTV on
the Pandanaran road used in this research. Due to a large number of intersections and their location in the
middle of Semarang city, the level of traffic density is very high during rush hour, so that it becomes a
challenge in building the vehicle counting system.
(a)
(b)
Figure 2. (a) Description of traffic around the Tugu Muda area (b) sample of capture frame from CCTV used
Live stream video can be accessed via rtsp://www.lalinsemarang.info:1935/live/tugumuda.stream,
using the OpenCV video library can be processed and processed for the next step described in detail
below.
4.1. Background subtraction and truncate threshold
The video taken from CCTV has a resolution of 352 × 288 pixels. In the initial stages of the video
will be separated frame by frame to do background subtraction. The background subtraction process uses
the adaptive Gaussian mixture (MOG2) method, this method was chosen because it has good and fast
performance (Trnovszký et al., 2017). Furthermore, the thresholding process uses the truncate method
which can be calculated by Eq. (1)(Bradski & Kaehler, 2008).
(1)
128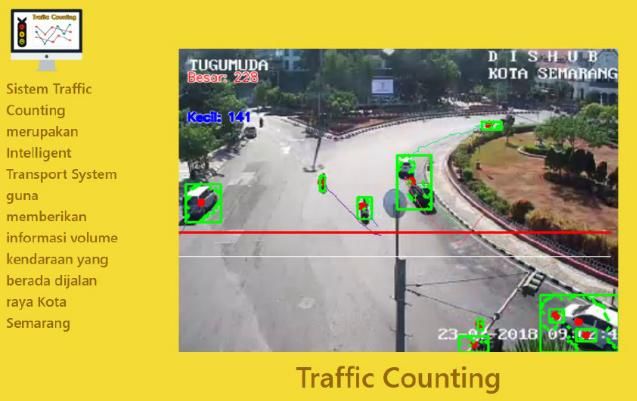
Transport and Telecommunication Vol. 21, no.2, 2020
Where is the threshold, and are the pixel coordinates, is the destination pixel, is the
source pixel, and is the maximum intensity value.
The result of this stage is a binary image, where the sample results of this process are presented in
Figure 3.
Figure 3. Sample frame result after background subtraction and truncate thresholding
4.2. Morphology using Erosion and Dilation
At this stage two morphological operations are used, namely erosion and dilation which function
to obtain a more optimal object. Erosion operations are performed first, functioning to remove noise and
objects that are considered useless, while dilation operations are used to thicken the area of the object to
facilitate the detection process. In Figure 4 the results of the erosion and dilation process are presented.
Figure 4. Sample result after erosion (left) and dilation (right)
4.3. Detecting Vehicle
Figure 5. Detecting object using chain code and region bound (left) then added bounding rectangle (right)
129
Transport and Telecommunication Vol. 21, no.2, 2020
At this stage, the object detection process is used using chain code and active contour, where the
system looks for the shape of objects that are found using bound regions by detecting each corner so as to
form a chain pattern. After the object is found and marked in the form of a chain pattern the object will be
marked with a green box to make it clear that the object is a vehicle. At this stage the object area is also
limited to a certain size, to eliminate small objects instead of passing vehicles, whether it be pedestrians
or other smaller objects. This size also needs to be adjusted to the size of the frame resolution and
repeated observations at the experimental stage.
4.4. Tracking and Counting Vehicle
After the object is found and marked with a green bounding rectangle, every movement of the
object will be tracked. This aims to validate that the object captured is a vehicle if the moving object
starts from the white line (the initial tracking line) and crosses the red line (the final tracking line) then
will be counted as a vehicle object, if it does not cross the red line then the object is not counted as a
vehicle. For the record, because of the location of the CCTV, the video captured passes through several
branches of the road, so in order to facilitate tracking the white and red lines are placed in such a way as
to track the vehicle from the direction of the Pandanran road towards Tugu Muda, in detail, see the
sample frame tracking in Figure 6.
(a) (b)
(c) (d)
Figure 6. Sample frame tracking
4.5. Application GUI and Results
All the methods described above are implemented in a web-based application built with the Python
programming language. Because tracking is real-time, the tracking results are summarized in some vehicle
calculation statistics every hour. For example, the data presented in Figure 7 during office hours there are a
total of more than 1000 vehicles that pass every hour. Where vehicles are classified into two based on their
sizes, such as cars, trucks, and buses are large vehicles and small vehicles are motorcycle.
Due to the large amount, from this data real-time video then samples are taken to calculate the
accuracy. This video sample is divided into three times: traffic in the morning, day time, and afternoon.
System calculations will be compared with calculations based on manual observations. The calculation
accuracy results are presented in Table 1.
Tabel 1. Accuracy Testing
Video Duration (in Proposed Accuracy
Time Real Count Error
seconds) Method Count percentage
Morning 54 164 160 4 97.56%
Day time 24 66 64 2 96.97%
Afternoon 44 123 115 8 93.50%
130Transport and Telecommunication Vol. 21, no.2, 2020
Figure 7. Web-based system traffic monitoring (left) and statistic report (right)
4.6. Comparison
As previously discussed, the proposed method is the result of developing a system that has been published
previously in research (Setiadi et al., 2019). The basic difference is the implementation of thresholding, which
uses the truncate threshold. With the same data set the results are compared, where a very significant increase in
results is shown in Figure 8.
Comparison with Previous Method
180
160
140
Vehicle Counter
120
100
80
60
40
20
0
Morning Daytime Afternoon
Real Count Method in (Setiadi et al., 2019) Proposed Method Count
Figure 8. Comparison with Previous Methods
Besides this method is also compared with other methods with different datasets and road traffic, presented
in Table 2.
Tabel 2. Comparison with previous method (different dataset and road traffic)
Average accuracy
Method Segmentation method Background Model Vehicle Type
percentage
(Lei et al., 2008) Background subtraction Adaptive background Cars only 84.77%
estimation
(Mohana et al., 2009) Optical Flow × Cars only 94.04%
(Huang et al., 2012) Background subtraction Adaptive background Cars and bikes 96.9%
estimation
(Moutakki et al., 2017) Background subtraction Codebook Model Cars, bikes, and trucks 99.45%
Proposed Background subtraction Adaptive Gaussian Small vehicles (bikes) 96.01%
mixture (MOG2) and big vehicles (cars,
trucks, and bus)
131Transport and Telecommunication Vol. 21, no.2, 2020
5. Conclusions
This research proposes a method for calculating the number of vehicles with implementation in
real-time data. In the implementation process not only is the accuracy of the method required, but the
speed of computing must also be adjusted to the internet connection and available hardware. This
research was built with the aim to be real implemented so that the proposed method is also adapted to
various conditions in the field, even though testing has not been done in rainy weather or night. In normal
circumstances that are in the morning, day time and afternoon produced relatively very good accuracy,
although not the best when compared with previous research. But it should also be noted that traffic in
Indonesia, especially in large cities is very dense and even quite chaotic, so the implementation of
methods in applications is relatively difficult and challenging. Using background subtraction based on
truncate thresholding can provide a very significant increase in accuracy when compared to binary
thresholding (standard). Increased accuracy by more than 20% so that vehicle counter accuracy reaches
96.01%. In further research, this method certainly still needs improvements such as the addition of
occlusion handling and a more detailed vehicle classification.
References
1. Arinaldi, A., Pradana, J. A., & Gurusinga, A. A. (2018). Detection and classification of vehicles for
traffic video analytics. Procedia Computer Science, 144, 259–268. DOI:10.1016/j.procs.2018.10.527
2. Badan Pusat Statistik. (2017). Perkembangan Jumlah Kendaraan Bermotor Menurut Jenis, 1949-
2017. DOI:10.1055/s-2008-1040325
3. Badan Pusat Statistik. (2020). Sensus Penduduk 2020 - Satu Data Kependudukan Indonesia.
Retrieved January 6, 2020, from https://www.bps.go.id/sp2020/slide-1.html#slide=7
4. Barcellos, P., Bouvié, C., Escouto, F. L., & Scharcanski, J. (2015). A novel video based system for
detecting and counting vehicles at user-defined virtual loops. Expert Systems with Applications,
42(4), 1845–1856. DOI:10.1016/j.eswa.2014.09.045
5. Bouwmans, T., Javed, S., Sultana, M., & Jung, S. K. (2019, September 1). Deep neural network
concepts for background subtraction: A systematic review and comparative evaluation. Neural
Networks, Vol. 117, pp. 8–66. DOI:10.1016/j.neunet.2019.04.024
6. Bradski, G., & Kaehler, A. (2008). Learning OpenCV (First Edit; M. Loukides, Ed.). Retrieved from
https://www.bogotobogo.com/cplusplus/files/OReilly Learning OpenCV.pdf
7. Davis, S. C., Williams, S. E., & Boundy, R. G. (2018). Transportation Energy Data Book. Retrieved
from https://tedb.ornl.gov/
8. Fernández-Sanjurjo, M., Bosquet, B., Mucientes, M., & Brea, V. M. (2019). Real-time visual
detection and tracking system for traffic monitoring. Engineering Applications of Artificial
Intelligence, 85, 410–420. DOI:10.1016/j.engappai.2019.07.005
9. Gaidash, V., & Grakovski, A. (2016). “Mass Centre” Vectorization Algorithm for Vehicle’s
Counting Portable Video System. Transport and Telecommunication Journal, 17(4), 289–297.
Retrieved from
https://content.sciendo.com/view/journals/ttj/17/4/article-p289.xml?rskey=vMNxen&result=6
10. Huang, D.-Y., Chen, C.-H., Hu, W.-C., Yi, S.-C., & Lin, Y.-F. (2012). Feature-based vehicle flow
analysis and measurement for a real-time traffic surveillance system. 3(3), 282–296.
11. Huang, D. Y., Chen, C. H., Chen, T. Y., Hu, W. C., & Feng, K. W. (2017). Vehicle detection and
inter-vehicle distance estimation using single-lens video camera on urban/suburb roads. Journal of
Visual Communication and Image Representation, 46, 250–259. DOI:10.1016/j.jvcir.2017.04.006
12. Lei, M., Lefloch, D., Gouton, P., & Madani, K. (2008). A video-based real-time vehicle counting
system using adaptive background method. SITIS 2008 - Proceedings of the 4th International
Conference on Signal Image Technology and Internet Based Systems, 523–528.
DOI:10.1109/SITIS.2008.91
13. Mandellos, N. A., Keramitsoglou, I., & Kiranoudis, C. T. (2011). A background subtraction
algorithm for detecting and tracking vehicles. Expert Systems with Applications, 38(3), 1619–1631.
DOI:10.1016/j.eswa.2010.07.083
14. Mohana, H. S., Ashwathakumar, M., & Shivakumar, G. (2009). Vehicle detection and counting by
using real time traffic flux through differential technique and performance evaluation. Proceedings -
International Conference on Advanced Computer Control, ICACC 2009, 791–795.
DOI:10.1109/ICACC.2009.149
15. Moutakki, Z., Ouloul, I. M., Afdel, K., & Amghar, A. (2017). Real-Time Video Surveillance System
for Traffic Management with Background Subtraction Using Codebook Model and Occlusion
132Transport and Telecommunication Vol. 21, no.2, 2020
Handling. Transport and Telecommunication Journal, 18(4), 297–306. Retrieved from
https://content.sciendo.com/view/journals/ttj/18/4/article-p297.xml?rskey=vMNxen&result=8
16. Pun, C. M., & Lin, C. (2016). A real-time detector for parked vehicles based on hybrid background
modeling. Journal of Visual Communication and Image Representation, 39, 82–92.
DOI:10.1016/j.jvcir.2016.05.009
17. Setiadi, D. R. I. M., Fratama, R. R., Partiningsih, N. D. A., Rachmawanto, E. H., Sari, C. A., &
Andono, P. N. (2019). Real-time multiple vehicle counter using background subtraction for traffic
monitoring system. Proceedings - 2019 International Seminar on Application for Technology of
Information and Communication: Industry 4.0: Retrospect, Prospect, and Challenges, ISemantic
2019, 23–27. DOI:10.1109/ISEMANTIC.2019.8884277
18. Sperling, D., & Gordon, D. (2008). Two Billion Cars Transforming a Culture.
19. Sun, M., Wang, Y., Li, T., Lv, J., & Wu, J. (2017). Vehicle counting in crowded scenes with multi-
channel and multi-task convolutional neural networks. Journal of Visual Communication and Image
Representation, 49, 412–419. DOI:10.1016/j.jvcir.2017.10.002
20. Trnovszký, T., Sýkora, P., & Hudec, R. (2017). Comparison of Background Subtraction Methods on
Near Infra-Red Spectrum Video Sequences. Procedia Engineering, 192, 887–892.
DOI:10.1016/j.proeng.2017.06.153
21. Yang, Z., & Pun-Cheng, L. S. C. (2018, January 1). Vehicle detection in intelligent transportation
systems and its applications under varying environments: A review. Image and Vision Computing,
Vol. 69, pp. 143–154. DOI:10.1016/j.imavis.2017.09.008
133You can also read