PLANNING FOR AUTONOMOUS MOBILITY - pas report 592 Jeremy Crute, William Riggs, aicp, Timothy S. Chapin, and Lindsay Stevens, aicp - City of Waco ...
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

p a s r e p o r t 592 PLANNING FOR AUTONOMOUS MOBILITY Jeremy Crute, William Riggs, aicp, Timothy S. Chapin, and Lindsay Stevens, aicp

ABOUT THE AUTHORS
APA RESEARCH MISSION
Jeremy Crute has been the senior planner in Florida State University’s Depart-
ment of Urban and Regional Planning for the last four years. There he has man-
APA conducts applied, policy-relevant research that
aged a wide range of applied and scholarly research projects on community
advances the state of the art in planning practice. redevelopment, transportation, and land-use issues. He has prior professional
APA’s National Centers for Planning—the Green community development experience in Chattanooga, Tennessee, and Atlanta,
Communities Center, the Hazards Planning Center, Georgia. He holds a master of science degree in urban and regional planning
and the Planning and Community Health Center— from Florida State University, and bachelors degrees in economics and com-
guide and advance a research directive that address- munity development from Covenant College.
es important societal issues. APA’s research, educa-
William (Billy) Riggs, aicp, phd, leed ap, is a global expert and thought leader
tion, and advocacy programs help planners create in the areas of future mobility and smart transportation, housing, economics,
communities of lasting value by developing and dis- and urban development. He is a professor at the University of San Francisco
seminating information, tools, and applications for School of Management, and an advisor to multiple companies and start-ups on
built and natural environments. technology, smart mobility, and urban development. This follows two decades
of work as a planner, economist, and engineer. He has written more than 100
publications; been featured in multiple global media outlets such as the Econo-
mist, Wall Street Journal, Washington Post, and The Atlantic; and is the author of
Disruptive Transport: Driverless Cars, Transport Innovation and the Sustainable
Since 1949, the American Planning Association’s Planning Advisory Service has City of Tomorrow (Routledge, forthcoming). He sits on Palo Alto, California’s
provided planners with expert research, authoritative information on best prac- Planning and Transportation Commission.
tices and innovative solutions, and practical tools to help them manage on-the-
Timothy S. Chapin, phd, is the dean of the College of Social Sciences and Pub-
job challenges. PAS Reports are produced in the Research Department of APA.
lic Policy and a professor in the Department of Urban & Regional Planning
James M. Drinan, jd, Chief Executive Officer; David C. Rouse, faicp, Managing
at Florida State University, where he has studied the effectiveness of Florida’s
Director of Research and Advisory Services; Ann F. Dillemuth, aicp, Editor. APA growth management regime, assessed the success of planning efforts in shaping
membership includes access to all PAS publications, including PAS Reports, PAS development outcomes, and evaluated the role of sports facilities in the pro-
Memo, and PAS QuickNotes. Learn more at planning.org/pas. motion of urban redevelopment. His current research interests revolve around
how autonomous vehicles and national demographic trends will influence ur-
ban development and transportation activities in Florida and the United States.
Recipients of print editions of PAS Reports with missing or damaged copies:
Over his career, he has secured more than $3 million in funding from federal,
Contact APA Customer Service 312-431-9100 or susbcriptions@planning.org) state, and local governments to support his research. Chapin has also served as
within 90 days of the publication date. interim editor, senior associate editor, and review editor for the Journal of the
American Planning Association.
©September 2018 American Planning Association, which has offices at 205
N. Michigan Ave., Suite 1200, Chicago, IL 60601-5927, and 1030 15th St., NW, Lindsay Stevens, aicp, is the land program manager for the Florida Chapter
of The Nature Conservancy, where she provides strategic leadership for land
Suite 750 West, Washington, DC 20005-1503; planning.org. All rights reserved.
protection efforts including implementation of conservation real estate transac-
No part of this publication may be reproduced or utilized in any form or by any tions and planning for the protection of critical areas in Florida. Prior to joining
means without permission in writing from APA. The Nature Conservancy, Stevens was planner-in-residence for the Florida State
University Department of Urban and Regional Planning, where she worked
on a wide variety of land-use and transportation planning projects, includ-
ISBN: 978-1-61190-200-6 ing the potential impact of automated vehicles on development of urban areas
in Florida. Stevens has also worked for Wakulla County, Florida, as assistant
county administrator, with The Trust for Public Land on conservation real es-
Email: pasreports@planning.org tate and planning projects, and as a land-use and real estate attorney with Baker
& Hostetler LLP.
ON THE COVER
Preparing cities for autonomous (self-driving) transportation re-
search project, Chicago’s West Loop (Stantec’s Urban Places)
TABLE OF CONTENTS
INFOGRAPHIC 2
EXECUTIVE SUMMARY 3
CHAPTER 1 INTRODUCTION 6
Planning, Uncertainty, and the Revolution 8
About This Report 9
CHAPTER 2 AUTONOMOUS VEHICLES 101 14
The Technology: What Is It and How Does It Work? 15
AV Ownership and the Rise of Shared AVs 20
Timeline for AV Adoption 21
Conclusion 24
CHAPTER 3 PLANNING OPPORTUNITIES AND CHALLENGES IN AN AV WORLD 26
AV-Related Planning Opportunities 27
AV-Related Planning Challenges 32
Other Secondary Impacts of AVs 34
Conclusion 39
CHAPTER 4 POTENTIAL IMPACTS OF AVS ON THE BUILT ENVIRONMENT 40
Rights-of-Way 41
Access Management 43
Signage and Signalization 43
Interface With Bicycles and Pedestrians 45
Parking 46
Redevelopment Opportunities 49
New Design Paradigms 51
Conclusion 51
CHAPTER 5 CONSIDERATIONS FOR POLICY MAKING AND INFRASTRUCTURE INVESTMENTS 52
Addressing Planning Opportunities and Challenges 53
Transitioning to an AV-Dominated System 67
Addressing AV in Community Planning Processes 70
Conclusion 71
CHAPTER 6 CONCLUSION: THE TRANSFORMATIVE IMPACTS OF AVS 72
REFERENCES 77
ACKNOWLEDGMENTS 84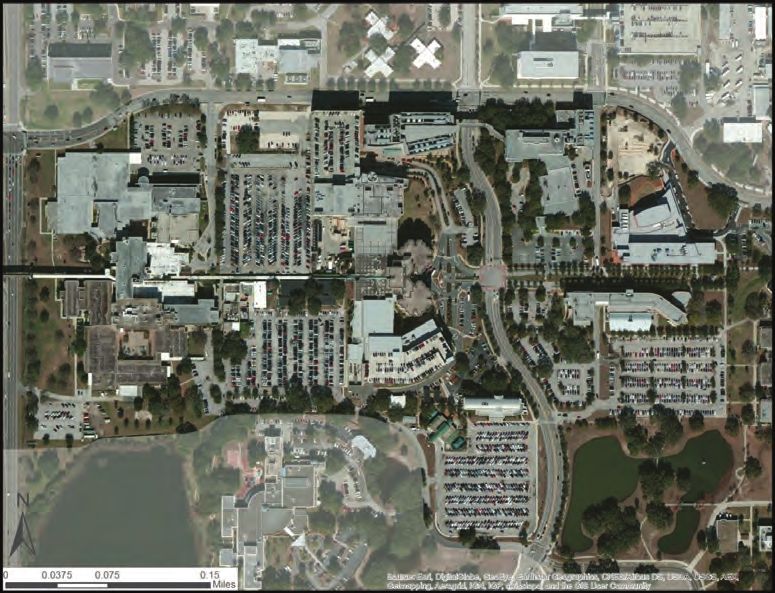
PLANNING FOR AUTONOMOUS MOBILITY
PA S 592, I N F O G R A P H I C
AVs:
Coming to a community near you
A future with autonomous vehicles (AVs) is
closer than you may think. PAS Report 592,
Planning for Autonomous Mobility,
will help you prepare for the
implications and changes.
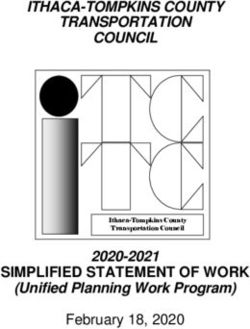
THE FUTURE IS HERE BIG CHANGES MORE PLANNING IS NEEDED
The earliest year an
automaker projects
1 shared AV policies
2020 they will have a fully AV in action
autonomous car Of the 500 largest US cities,
available for how many of them have
the public AV policies?
could replace
between 9 and 11
privately-owned
vehicles.
2040 43 %
or more:
expected
reduction
rate in vehicles
Estimated privately owned
year when
50 %
of cars will
be AVs Parking,
automotive
uses, transit, ■ No AV policy: 95%
biking, and
■ AV in the comprehensive
walking will
plan: 3%
all be affected
by this shift ■ AV ordinance: 2%
on our roads. Source: Riggs, Steins, and Chavan 2018
2 AMERICAN PLANNING ASSOCIATION www.planning.org
PLANNING FOR AUTONOMOUS MOBILITY
PA S 592, E X E C U T I V E S U M M A RY
EXECUTIVE SUMMARY
PAS Report 592, Planning for Autonomous Mobility, serves as a call to action for professional planners, especially those
working in the public sector in the transportation and land-use arenas. Autonomous vehicles (AVs) will transform the built
environment in the coming decades, and communities must begin planning for AVs now to ensure that this new technol-
ogy is harnessed in beneficial ways. The primary goals of this PAS Report are to (1) provide planners and policy makers
with the foundational knowledge necessary to anticipate potential impacts of AVs on communities, and (2) support and
spur development of policy solutions and infrastructure investments that ensure attractive, people-friendly, equitable, and
safe urban environments.
This PAS Report explores the many benefits that AVs However, this transformative potential does not come
may provide, but also looks at the challenges that AVs will solely from AV technology. The convergence of technological
bring to communities. The many potential impacts of AVs in- advances with the rise of the shared economy and ride-sharing
clude the following: services like Lyft and Uber could transform the predominant
• altering the design of rights-of-way mobility paradigm from privately owned to shared vehicles. A
• changing access management practices transition to shared mobility would have significant implica-
• influencing the form and function of traffic signage tions for the size of the vehicle fleet, traffic congestion, parking,
and signalization and urban design. Ultimately, shared AVs could lead to a much
• bringing massive changes to pedestrian and bicycle smaller vehicle fleet as each vehicle completes more trips.
networks The timeline for AVs’ arrival will help determine how
• reducing the demand and altering the design and planners need to respond, but predicting AV adoption rates
location of parking is a difficult task. The technology is advancing rapidly and
• creating redevelopment opportunities in urban and several companies anticipate having AVs available for sale in
suburban locales the early 2020s. The novelty and convenience of autonomous
driving could speed adoption, and highly, if not fully, autono-
It is imperative for planners to begin considering how mous vehicles could easily represent at least a quarter of the
AVs will affect our built environment and how this technol- vehicles on the road in less than 15 years. However, vehicle
ogy can contribute to community livability, efficient trans- prices, regulatory delays, and uncertainties surrounding in-
portation systems, and vibrant public spaces. surance, legal liability, testing and validation procedures, and
cybersecurity could delay AVs’ market availability.
As AVs take on a greater share of the vehicle fleet over
WHAT ARE AVS AND WHEN time, there will be a complex and messy transition period
WILL THEY GET HERE? where autonomous and human-driven vehicles share the
road. Regardless of the exact timeline, AVs are coming, and
Autonomous vehicles encompass a wide range of emerging they will irrevocably change transportation systems, the built
technologies that had previously been the stuff of science fic- environment, and our communities.
tion. Already, advanced driver assistance systems are improv-
ing safety by controlling specific driving functions; fully au-
tonomous vehicles will be capable of driving without human HOW WILL AVS CHANGE TRANSPORTATION
operation. Connected vehicle technologies will enable these AND THE BUILT ENVIRONMENT?
vehicles to communicate and coordinate amongst themselves
and the surrounding infrastructure, further improving travel Like the changes to society already brought by shared mo-
safety and efficiency. Advancements in electric vehicle and bility and digital ride-hailing services, AVs will disrupt the
traffic management systems will complement the emergence way that citizens travel and businesses operate. The technol-
of AVs and magnify the benefits they promise to provide. ogy brings both promise and peril.
www.planning.org AMERICAN PLANNING ASSOCIATION 3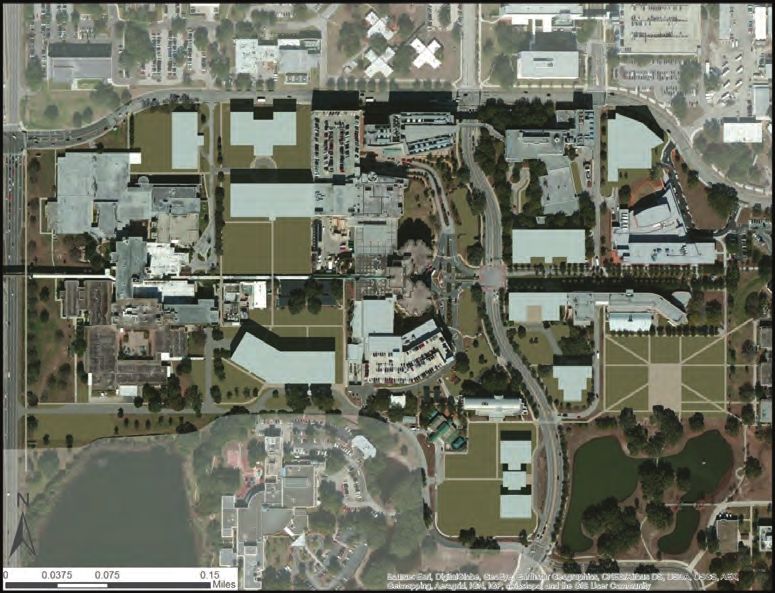
PLANNING FOR AUTONOMOUS MOBILITY
PA S 592, E X E C U T I V E S U M M A RY
This PAS Report explains how AVs have the potential to and productive landscapes, encouraging a diversity of hous-
improve the safety and efficiency of transportation systems, ing types and densities, promoting a range of travel modes,
reduce vehicle emissions, and improve the mobility of trans- and serving the built environment with quality infrastruc-
portation-disadvantaged populations. However, AVs will not ture in core urban and suburban areas. Planners must pre-
solve all planning problems and will create new ones, such as pare their communities for the wide range of possible impacts
the need for drop-off zones, vehicle storage or circulators for that AV technology may have on transportation and the built
vehicles as they await users, and expensive new transporta- environment, integrating AV considerations into community
tion infrastructure to maximize the benefits of the technol- planning practices through techniques such as visioning and
ogy. AVs may also reinforce urban sprawl by reducing the scenario planning.
monetary and perceived costs of travel, further decreasing This report offers important recommendations for ac-
the friction of distance for households and businesses. In ad- tion. First, parking standards and requirements require im-
dition, AVs will have important ramifications on several oth- mediate attention, as parking demand and need is changing
er key planning areas, including transit, public health, and with each passing day. While this has been the case for a
social equity. In each of these areas, proactive steps will be long while, it is of heightened importance in an autonomous
required for planners and policy makers to capitalize on the future. Second, cities must bolster transportation demand
opportunities while mitigating the challenges. management efforts and link those more overtly to a shared
Two of the most significant areas this report identifies and autonomous mobility future. These efforts can be en-
in the planning realm are (1) parking and (2) the curb. Plan- hanced by curbside pick-up and drop-off policies, with this
ners and policy makers have seen significant changes in re- report illustrating some visions for how that can occur.
cent years in parking inventory and curbside management. Third, planners must rethink the right-of-way for al-
These shifts to reduced parking demands and ride sharing ternative modes, recognizing that AVs offer an opportunity
with curbside pick-up and drop-off will only become more to “right-size” roads at the human scale. Building upon the
pronounced with the rise of AVs. complete streets movement, in the longer run AVs offer the
AVs will also affect the built environment in a myriad of potential for aggressive road diets that reallocate space pre-
ways, including new right-of-way designs, changes to access viously used for automobiles back to human-powered and
management practices, reconsideration of signage and sig- active travel modes. Communities should prioritize these
nalization, new models for pedestrian and bicycle networks, modes in their comprehensive and general plans and begin
and reductions in demand and changes to the location of to experiment with new roadway typologies that provide ac-
parking. The report also forecasts redevelopment opportuni- commodation to these modes. Right-of-way reallocation also
ties in urban and suburban locales from former auto-serving holds the potential to provide new space for green infrastruc-
uses, while narrower rights-of-way, enhanced bicycle and ture, public gathering places, and other features that can help
pedestrian facilities, and redevelopment may create excellent achieve various community goals.
opportunities to revitalize urban centers. Finally, communities should pursue the opportunities
However, by making travel easier and more convenient, that AVs bring to improving transit service. Transit plan-
AVs could undermine these opportunities by encouraging ners must welcome this change and seek opportunities to
sprawl, expanding the already voracious metropolitan de- pilot transit-specific applications of AV technology. Nu-
velopment that exists in the United States. Careful planning merous jurisdictions are piloting or implementing fully
and policy will be required to shape these built environment autonomous transit routes on public roads across the coun-
impacts to ensure the creation of vibrant, sustainable, and re- try. These efforts showcase the power of AV technology to
silient communities. provide transit services that provide accessibility to under-
served portions of communities.
WHAT CAN PLANNERS DO NOW?
CONCLUSION
The key takeaway from this PAS Report is this: There is no
substitute for quality, comprehensive, long-term oriented The private automobile has played a major role in shaping
planning. It is imperative that the profession remain commit- the built form of cities and suburbs. In almost all commu-
ted to its foundational principles of protecting sensitive land nities, development and land-use patterns during the 20th
4 AMERICAN PLANNING ASSOCIATION www.planning.org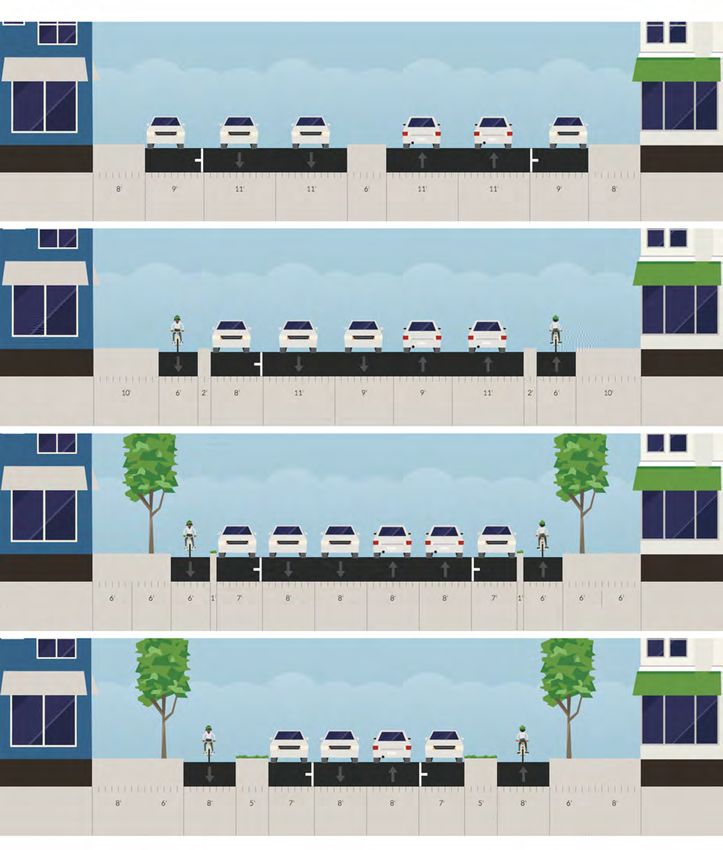
PLANNING FOR AUTONOMOUS MOBILITY
PA S 592, E X E C U T I V E S U M M A RY
century reflect policies and planning that prioritized it over
alternative means of transportation. Although the auto-
mobile was originally seen as a technological advance that
would improve society as a whole, market conditions and
policies yielded a sprawling development pattern with nega-
tive environmental, social, and economic impacts—issues
that planners still wrestle with every day.
Today, AVs are poised to disrupt the built environment
and planning practices in ways that may be hard to imag-
ine and will be difficult to immediately determine. While
the private automobile yielded a 20th century dominated
by suburban expansion, this report makes the case that AV
technology has the potential to support and promote ur-
ban (re)development for the next century. With planners
leading the way, a sustainable AV future can be made pos-
sible through thoughtful visioning, quality planning, and
smart investment. Now is the time to begin embracing the
transformative power of autonomous vehicle technology to
change our communities for the better.
www.planning.org AMERICAN PLANNING ASSOCIATION 5
CHAPTER 1 INTRODUCTION

Just over a century ago, the mass production and rising affordability of the private automobile contributed to massive changes
in transportation networks, individual travel behaviors, and the built environment (Chapin, Stevens, and Crute 2017). The
private automobile provided greater mobility, allowing drivers and their passengers to escape dense, complicated, and pol-
luted urban centers. In the following decades, federal, state, and local governments supported this increased mobility through
massive investments in road networks, state highways, and ultimately a massive interstate system that allows for high-speed
travel over long distances.
This increased mobility brought about long-term chang- Stevens, and Crute 2016; Riggs forthcoming). This rapidly
es in the built environment as well. At the metropolitan level, advancing technology offers the promise of increased safety
reduced travel times and costs contributed to the suburban- for users and greater efficiency in systems operation. AVs also
ization of upper-class households in the 1920s, and then mid- allow riders to be productive and entertained during their
dle-class households starting in the 1940s. These moves took travel times, provide mobility to populations that are unable
shape for a number of reasons, from middle-class families to drive (children and the elderly), and will almost certainly
of returning GIs looking for larger homes to historic racial contribute to changes in vehicle ownership patterns. They
tension resulting in concentrations of minorities in and afflu- offer the potential to launch a wide range of new mobility
ent suburban flight from many large cities. In any case, these options that serve targeted populations ranging from urban
new suburbanites consumed far-flung single-family hous- communities to isolated lower-income populations.
ing at extremely affordable rates, contributing to America’s Alongside this potential, AVs (and artificial intelli-
sustained economic boom in the post-World War I and post- gence in general) offer possible challenges. They could lead
World War II eras. to changes in historical housing settlement patterns, caus-
As these wealthier households left the city, retail centers ing sprawl to spread farther into exurban areas. In a rapidly
followed. Whereas the early 1900s saw most retail outlets lo- aging society with growing social and economic disparities,
cated in downtowns and urban neighborhoods, by the 1960s they may exacerbate spatial and cultural separation. As e-
the suburban shopping mall and strip mall had come to dom- commerce and workplace automation continue, they could
inate the retail market. The rise of the automobile brought reshape how, where, and when community members live,
about changes at the corridor and site levels as well. Urban and work, play, and shop.
suburban arterials were designed to promote speed and safety Beyond these very important improvements in safety
for automobiles, and mobility concerns came to dominate and mobility, not to mention the possible quality-of-life
roadway design. At the site level, buildings were pushed back benefits for a variety of users, AVs have great potential to
to make room for automobile parking, and parking standards impact and alter the built environment in the coming de-
for the busiest parking day of the season came to dominate cades. While these impacts—positive or negative—are not
local codes. In a few decades, the American landscape was fully predictable, all indications are that the impact of AVs
largely redesigned to ensure that the private automobile could on roadway design, urban form, and site design may be of
travel at speed, over long distances, and with easy ingress and a magnitude similar to those that occurred during the rise
egress to the vast majority of land uses in the city. of the private automobile in the early 20th century. As de-
The central contention of this report is that autonomous tailed in the report, there is strong evidence that AVs could
vehicles (AVs) will cause the next great transformation in our enable narrower rights-of-way and travel lanes; influence the
transportation systems and the built environment (Chapin, location, form, and amount of parking; impact the mobility
www.planning.org AMERICAN PLANNING ASSOCIATION 7
PLANNING FOR AUTONOMOUS MOBILITY
PA S 592, C H A P T E R 1
of bicyclists and pedestrians; declutter urban environments need to harness the opportunities AV technology provides,
through reduced signalization and signage; and provide op- mitigate potential concerns, and ensure sustainable and peo-
portunities for redevelopment on excess parking lots and ple-oriented communities. Autonomous vehicles will cause
rights-of-way. the next great transformation, impacting not only transpor-
Nonetheless, it is important to recognize that AVs will tation systems, but the built environment of our cities. How
not solve all community problems. If increases in driving we respond will shape this impact.
continue and household car ownership remains as it is, more
cars driving more miles each year will only worsen conges-
tion issues. AVs bring the possibility of making biking and PLANNING, UNCERTAINTY, AND
walking more difficult, because AVs require more frequent THE REVOLUTION
stops and free-flow intersections may become ubiquitous.
Lastly, AVs may spell real problems for already challenged The adoption of and planning for AVs is surrounded by a
mass transit systems, and bus drivers, taxi drivers, and truck- large degree of uncertainty. All of the major car manufactur-
ers may see their work opportunities disappear. Planners will ers are actively working on AV technology and several have
need to anticipate and mitigate these new challenges to con- already tested vehicles on the roads. Technology companies
tinue building better communities. Consequently, planners such as Google and Apple also have vehicles, with others such
TABLE 1.1. POTENTIAL MANUFACTURERS, FUNDING, AND PLATFORM NOTES
Approximate Level 3 Level 4/5
Company Shared / Fleet Notes
Funding Availability Availability
BMW 2021 2025 Y Shared at first; partnership with Intel and Mobileye
Daimler /
TBD TBD Y Partnership with Uber; freight introduced first
Mercedes
Ford $1–2B 2021 TBD Y Potential partnership with Waymo or Lyft
Fiat-Chrysler 2021 TBD Potential partnership with Waymo or Lyft
GM $581M 2018 TBD Partnership with Lyft
Honda 2020 TBD Potential partnership with Waymo or Lyft
Hyundai $1.7B 2020 TBD Level 3 (highway capable) by 2020
Renault-Nissan 2020 TBD Partnership with Nissan
Claims Level 3 capability with autopilot and that Level 4 can
Tesla 2017 2020 N
be achieved without Lidar
Toyota $1B 2020 TBD TBD Being led by Toyota Research Institute
Waymo 2020 TBD May develop vehicles independently
Volvo $300M 2021 TBD Partnership with Uber; will self-insure for liability
Sources: Venture Beat.com, IDC, BMW
8 AMERICAN PLANNING ASSOCIATION www.planning.orgPLANNING FOR AUTONOMOUS MOBILITY
PA S 592, C H A P T E R 1
as Tesla claiming that their vehicles could be autonomous in expanded roadways and parking garages, but AVs may
(Crothers 2016; Harris 2015). change the demand for parking and spatial siting variables.
There are still questions about when vehicles will be de- City planners and leaders should begin asking questions and
ployed and ready for purchase. While much of these are spec- preparing for this potential future. By looking at different
ulation, as shown in Table 1.1 (p. 8), synthesized data from AV-future scenarios, planners can develop plans that are flex-
numerous sources suggest the most basic form of AVs will ible and adaptable.
be widely available in three to five years. This basic level of
autonomous driving is called Level 3 technology, which is the
equivalent of “lane assist” or systems that correct a vehicle’s ABOUT THIS REPORT
course when it drifts out of its lane. (More detail about the
different “levels of autonomy” is provided in Chapter 2.) The primary goals of this PAS Report are to (1) provide plan-
While this report provides more information about these ners and policy makers with the foundational knowledge
levels of autonomy, ultimately, the availability of AVs and necessary to anticipate potential impacts of AVs on commu-
when they will become fully autonomous is subordinate to nities and (2) support and spur development of policy solu-
how they will be owned and used in the future. This relates to tions and infrastructure investments that ensure attractive,
three concepts that will be discussed as a part of this report— people-friendly, equitable, and safe urban environments.
what researchers have referred to as the “three revolutions In this report we attempt to envision the impact of AVs
in urban transportation” (3Rs) (Fulton, Mason, and Meroux on communities as a starting point for planning agencies to
2017). Planners have speculated that three key revolutionary begin preparing and planning for the emergence of AV tech-
aspects of AVs (that they will be autonomous, electric, and nology. This report focuses on issues and policy interven-
shared) will impact cities. Yet, the future is uncertain and a tions for planners to consider so that they can develop more
3R scenario is highly dependent on the decisions automak- thoughtful, robust, and adaptable plans to prepare for the
ers (sometimes called original equipment manufacturers, or adoption of AVs. Planners can begin rethinking things such
OEMs) and land-use planners make now. as parking, street design and engineering, streetscape and ur-
In light of this, this report argues that the current un- ban design, asset investment, municipal finance, transit and
certainty is not an excuse for inaction. There has been very bikes, and land use, among others.
little policy development addressing the potential benefits or The emergence of AVs is almost upon us, and how the AV
limitations of the AVs of the future. Moreover, the policy that revolution takes hold largely depends on the actions planners
has been developed is highly speculative. and policy makers take now. Consequently, planners have an
The planning and infrastructure projects that planners important opportunity to shape sustainable, resilient urban
provide guidance on shape the form of cities every day, and forms where AVs contribute to a successful multimodal sys-
these recommendations and insights have long-term impli- tem. The structure and content of the report is outlined below.
cations. Agencies like the World Economic Forum already Chapter 2 provides a primer of baseline information on
speculate that the technology is developing faster than ex- the state of AV technology today. For planners to make in-
pected and that cities will likely not be prepared for self-driv- formed policy decisions, they need to understand the capabili-
ing vehicles (Abrams 2016). Work by Guerra (2015a, 2015b) ties and limitations of the technology. To this end, this chap-
found that in 2015, only two of the 25 largest metropolitan ter describes what AV technology is and is not capable of. It
areas mentioned autonomous or connected vehicles in their then outlines the implications of several other advancements
planning documents. This work cites (1) the uncertainty of in transportation technology, such as connected vehicles and
the impact of AVs and (2) the disconnect between present in- advanced traffic management systems that could complement
vestments and future technology as two of the primary rea- AVs and amplify their benefits. The convergence of autono-
sons why governments are not planning for the AV systems mous technology with car- and ride-sharing trends could shift
of the future. See the sidebar on pp. 10–11 for examples of the predominant model of automobile use from private own-
planning policy language addressing AVs that does exist. ership to shared mobility, particularly in urban areas. This
Planners and policy makers should be anticipating a chapter highlights how the use of shared AVs could further
changing and uncertain future by practicing scenario plan- their impacts on travel behavior and the built environment.
ning and providing incremental guidance. For example, Finally, Chapter 2 draws from professional and academic pro-
many communities are making significant investments jections to provide an expected timeline for AV adoption.
www.planning.org AMERICAN PLANNING ASSOCIATION 9PLANNING FOR AUTONOMOUS MOBILITY
PA S 592, C H A P T E R 1
AV POLICY LANGUAGE FROM EXISTING PLANNING DOCUMENTS
Austin, TX, Smart Mobility Roadmap: 13. Create a regional New Mobility Work- 2. Collaborate regionally to promote in-
Austin’s Approach to Shared, Elec- force Training task force for new job teroperability.
tric, and Autonomous Vehicle Tech- training and educational opportuni- 3. Launch a taskforce on data monetiza-
nologies (2017) ties for those with legacy occupations tion strategies.
www.austintexas.gov/smartmobility 4. Advocate for new approaches to fi-
roadmap Boston Transportation Department, nancing infrastructure projects.
Go Boston 2030 Vision and Action TODAY (0–2 years)
Autonomous Vehicles Recommended Plan (2017) 1. Develop a business plan for a city AV
Actions: w w w. b o s to n . g o v/d e p a r t m e nt s / fleet.*
1. Engage citizens, businesses and transportation/go-boston-2030 2. Create a dedicated staff position fo-
visitors on how this technology can cused on connected and automated
meet their needs and address com- Goal: Flexibility to accommodate disrup- vehicle tech.
munity issues tive mobility technologies 3. Implement blind spot detection sys-
2. Hire an Executive Level Officer of EV/ The arrival and adoption of new tems for public transit vehicles.*
AV Transportation technology—such as autonomous 4. Expand LADOT connected bus tech-
3. Develop a Master Plan roadmap for cars, electric tricycles, and self-driving nologies fleet-wide.
emerging electric–connected and buses—is imminent. Boston will ac- 5. Invest in lane markings that enhance
autonomous vehicle (E-CAV) tech- commodate these and other emerging effectiveness of lane departure warn-
nologies vehicle types by creating infrastructure ing and prevention systems.
4. Create an interdisciplinary AV Work networks that can be easily repurposed. TOMORROW (3–5 years)
Group Car and curbside lanes on major corri- 1. Create better access to ATSAC data
5. Create an infrastructure task force to dors like Columbia Road or in dense ar- and enhance transparency of net-
examine electric, technology and eas such as the Theater District will offer work prioritization for planning.
land use infrastructure requirements parking at some times and bus or bike 2. Develop an AV road network along
6. Test Dedicated Short Range Commu- lanes at others and serve as designated transit and enhanced vehicle net-
nication (DSRC) technology for ve- pick-up and drop-off locations for pas- works.
hicle to infrastructure (V2I) reciprocal sengers and parcels. Traffic signals will 3. Launch a Data as a Service program
safety messages adapt automatically, relying on sensors to provide real-time infrastructure
7. Test 5G technology for vehicle to and algorithms to optimize the move- data to connected vehicles.
infrastructure (V2I) reciprocal safety ment of people. New buses will be com- FUTURE (6+ years)
messages; compare to DSRC patible with older fleet vehicles while • Convert the public transit vehicle
8. Increase public awareness of electric leveraging emerging technology. fleet to fully automated.
autonomous (E-AV) shuttles in vari- ———
ous Austin locations through EV/AV Los Angeles Department of Trans- * Action already planned or underway.
pilots portation, Urban Mobility in a Digital
9. Increase public awareness of last mile Age (2016) Portland, OR, Draft Connected and
E-AV delivery robots www.urbanmobilityla.com/download Autonomous Vehicles Policy (2017)
10. Establish an EV/AV Commercialization www.portlandoregon.gov/transporta-
Opportunities/ Economic Develop- Transportation Technology Strategy 5: tion/article/643814
ment Work Group Prepare for an automated future
11. Create Shared/EV/AV focused team Policy 9.xx Connected and Autono-
12. Increase public awareness of electric Policy Recommendations mous Vehicles. Ensure that connected
and autonomous vehicle benefits 1. Call for mobility innovation in California. and autonomous vehicles advance
10 AMERICAN PLANNING ASSOCIATION www.planning.orgPLANNING FOR AUTONOMOUS MOBILITY
PA S 592, C H A P T E R 1
Portland’s Comprehensive Plan mul- Policy EA6: Acknowledge and miti- privacy, open, anonymized data can im-
tiple transportation goals and policies, gate the labor implications of automat- prove the City’s decisionmaking and
including vision zero, climate pollution ed mobility, particularly in the for-hire, help to develop more informed policies
reduction and cleaner air, equity, physi- freight, and public transit industries, and plans.
cal activity, economic opportunity, great among others. » Introduce polices that can influ-
places, cost effectiveness, mode share, Policy EA7: Conduct a publicly-vis- ence how driverless vehicles can affect
and reducing vehicle mile traveled. ible community consultation and out- VMT, urban sprawl, and/or parking re-
reach process to understand concerns, quirements. Examples include tolls for
Seattle Department of Transporta- needs, and opportunities related to the single-occupancy vehicles, new HOV/
tion, New Mobility Playbook, Appen- impending automated mobility para- HOT lanes, create and enforce urban
dix C: Preliminary Automated Mobil- digm. growth boundaries, reduce (or even sub-
ity Policy Framework (2017) Policy EA8: Establish a City-owned sidize) costs and parking fees for shared
https://newmobilityseattle.info transportation network company digi- ride services, and explore parking re-
tal platform to incubate smaller shared quirements in zoning laws and encour-
EQUITY AND ACCESSIBILITY automated vehicle fleet businesses, miti- age more pick-up/drop-off locations at
The following policies ensure that auto- gating the risk of mobility monopolies in developments.
mated mobility and other future trans- Seattle
portation innovations are designed with [Other policies address regula- San Jose, CA, Smart City Vision
a racial and social justice lens, accommo- tion and parameters, infrastructure and www.sanjoseca.gov/index
dating the wide cross section of Seattle- street design, pilots and partnerships, .aspx?NID=5289
ite’s abilities and backgrounds. mobility economics, and land use and
Policy EA1: Ensure the benefits of building design.] Demonstration City: Reimagine the City
automated mobility are equitably dis- as a laboratory and platform for the most
tributed across all segments of the com- San Antonio, TX, SATomorrow Multi- impactful, transformative technologies
munity and that the negative impacts of modal Transportation Plan (2016) that will shape how we live and work in
automated mobility are not dispropor- www.satransportationplan.com the future.
tionately borne on traditionally margin- Fully develop the city’s transporta-
alized communities. The City of San Antonio should consider tion innovation zone to test new prod-
Policy EA2: Ensure shared auto- the following planning and policy activi- ucts and services, such as autonomous
mated vehicle fleets consider the safety ties to manage the impact of CV/AV on vehicles, that will dramatically shape
needs of vulnerable populations and the city: transportation in the future and mitigate
loading needs of seniors, families with » Update the City’s travel demand traffic congestion.
children, and individuals with mobility model. The City’s travel demand mod- Build an “Internet of Things” plat-
impairments. els should ideally reflect updated infor- form employing transit vehicles and in-
Policy EA3: Establish equitable per- mation regarding who is traveling (e.g., frastructure by using smart sensor tech-
formance standards and penalty struc- elderly and disabled may travel more nologies to improve safety, mobility, and
tures for shared automated vehicle fleet due to AVs), where people are living and optimize our transit system.
wait time and declined rides as a way to working, how many trips they are taking, Create pathways for start-ups and
eliminate discriminatory practices. people’s value of time while traveling, innovators to easily access opportuni-
Policy EA4: Require a percentage of what level of shared rides are occurring, ties to pilot and test new products and
shared automated vehicle fleet vehicles and the vehicle ownership model. It services with the City, such as by hosting
to be ADA-compliant to meet the needs should also capture any changes asso- “demo days” to highlight the most inno-
of people with disabilities. ciated with freight delivery. This update vative “smart city” companies in Silicon
Policy EA5: Identify and require needs to be on the City’s horizon as the Valley, and sponsoring public competi-
shared automated vehicle fleets to serve industry matures its approach to fore- tions to encourage crowdsourcing of
markets that are underserved by transit casting this new future. innovative solutions to civic challenges.
and focus on connecting people to high » Encourage open data sharing.
quality transit spines. While it is important to preserve people’s
www.planning.org AMERICAN PLANNING ASSOCIATION 11PLANNING FOR AUTONOMOUS MOBILITY
PA S 592, C H A P T E R 1
Chapter 3 outlines the major opportunities and chal- opted, this chapter also emphasizes the need for nimble plan-
lenges likely to emerge as AV technology becomes ubiquitous ning processes and policies that proactively accommodate the
in communities around the country. AVs have the potential technology’s rapidly evolving capabilities. Key considerations
to improve the safety and efficiency of transportation sys- to incorporate into infrastructure investments and redevel-
tems, reduce vehicle emissions, and improve the mobility of opment decisions moving forward are also highlighted. Fi-
transportation-disadvantaged populations. Unfortunately, nally, Chapter 6 wraps up the report with a final call to action.
AVs will also bring challenges that threaten to negate their
potential benefits. In particular, AVs may reinforce auto-
oriented sprawl, which could increase vehicle miles traveled
(VMT) and congestion. Without careful planning, AVs could
also compromise bicycle and pedestrian mobility. Further,
AVs will have important ramifications for several key urban
issues, such as public transit, public health, and social equity.
Since private companies are investing so many resources in
developing the technology itself, these secondary effects of
AVs will be the main concern for planners to ensure the tech-
nology does not have adverse ramifications for placemaking
or quality of life. This chapter summarizes each of these is-
sues to identify how they will shape AVs’ impact on the built
environment and appropriate policy responses to capitalize
on the important opportunities the technology provides.
Building on the findings of the first three chapters, Chap-
ter 4 makes the case that AV technology will catalyze the next
great transformation in the built environment. This section
draws heavily upon a Florida Department of Transportation-
funded study completed at Florida State University (Chapin,
Stevens, and Crute 2016) to identify six major areas where
AVs may impact the built environment: (1) new designs of
rights-of-way, (2) changes to access management practices,
(3) reconsideration of the form and function of signage and
signalization, (4) new models for pedestrian and bicycle net-
works, (5) reductions in demand and changes to the location
of parking, and (6) new redevelopment opportunities in ur-
ban and suburban locales. Each of these is explored in detail
to develop a potential vision of the future in an AV world.
Chapter 5 then provides guidance on how planners
should prepare for and respond to these far-reaching chang-
es. This will provide a place for communities to start to ad-
dress the planning opportunities and challenges identified
in Chapter 3 and the ways AVs will shape the built environ-
ment described in Chapter 4. Throughout this discussion, the
chapter highlights the need for proactive planning efforts to
ensure that future development patterns and urban form are
shaped by sound planning principles rather than by the tech-
nology. In other words, cities should be designed for people
and not for technology to be attractive, people-friendly, eq-
uitable, and safe urban environments. Given the uncertainty
surrounding how and when AVs will be developed and ad-
12 AMERICAN PLANNING ASSOCIATION www.planning.orgPLANNING FOR AUTONOMOUS MOBILITY
PA S 592, C H A P T E R 1
www.planning.org AMERICAN PLANNING ASSOCIATION 13CHAPTER 2 AUTONOMOUS VEHICLES 101
Autonomous vehicle technology is a rapidly developing technology that promises to revolutionize the form and function of
our urban spaces. To understand how it will do that, it is important to become familiar with what the technology is and how it
works. AV technology is often presented as an easy solution to many of our planning problems. Understanding what the tech-
nology is and is not capable of will enable planners to more effectively use it as a tool to improve their communities without
expecting it to solve safety and congestion issues or neglecting sound planning practice.
AV technology is advancing so rapidly that it is vital for is published. Therefore it is important that this chapter is
planners to stay up to date on the latest in technological ad- viewed not as the definitive guide to AVs but as a first step in
vancements. This is especially important because, as will be a continuous learning process.
described in more detail later, the exact form and capability
of the technology will ultimately be a major determinant of
its impact upon the transportation system and the built en- THE TECHNOLOGY: WHAT IS IT AND
vironment. For example, the size of AVs may determine lane HOW DOES IT WORK?
width and other roadway design features. Consequently, this
section will provide an overview of the current state of the AVs have captured the public’s imagination and have been the
technology, but given the speed at which the technology is main focus of the media’s discussion of intelligent transpor-
advancing, this may be out of date by the time this report tation systems. However, recent advancements in technology
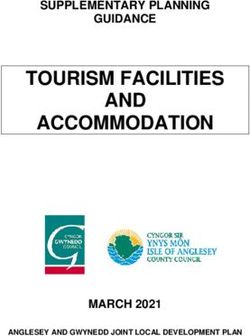
Figure 2.1. Diagram
of automated vehicle
GPS (global positioning system) technologies (adapted
combined with readings from Lidar (light detection and ranging)
tachometers, altimeters and monitor the vehicle’s surroundings (road, from BCG 2015)
gyroscopes to provide the most vehicles, pedestrians, etc.)
accurate positioning
Video cameras
monitor the vehicle’s surroundings
Ultrasonic sensors to (road, vehicles, pedestrians, etc.) and
measure the position of objects read traffic lights
very close to the vehicle
Odometry sensors to
complement and improve
GPS information
Central computer analyzes all sensor input, Radar sensors
applies rules of the road and operates the steering, monitor the vehicle’s surroundings
accelerator and brakes (road, vehicles, pedestrians, etc.)
www.planning.org AMERICAN PLANNING ASSOCIATION 15PLANNING FOR AUTONOMOUS MOBILITY
PA S 592, C H A P T E R 2
have included much more than just AVs. The development
DEFINITIONS AND ACRONYMS of advanced driver assistance systems and connected vehicle
technology has quietly provided growing opportunities to
Autonomous Vehicle (AV)— A vehicle that improve the safety and efficiency of the transportation sys-
is capable of driving itself without hu- tem. Ultimately, the greatest benefits will come from having
man intervention all these technologies and systems working together in har-
mony, but while fully autonomous vehicles are being tested
Advanced Driver Assistance Systems and piloted, these additional technologies may provide excit-
(ADAS)—A range of vehicle technolo- ing opportunities, particularly in the near term. Consequent-
gies that enhance driver safety by tak- ly, it is important for planners to be aware of the full range of
ing temporary control of one or more available technologies to make informed decisions as to what
driving functions (speed, lane position, will provide the most benefit for their communities. The side-
braking, etc.) bar on this page offers a list of definitions and acronyms as a
resource for planners on AV terminology.
Connected Vehicle (CV)—Features that
enable vehicles to communicate with
Automated Vehicle Technology
other vehicles, the infrastructure, or pe-
Automated vehicle technology is an umbrella term that in-
destrians
cludes a wide variety of features and technologies that enable
Vehicle to Vehicle (V2V)—CV technol- vehicles to take control of some or all of the major driving
ogy that enables vehicles to commu- functions normally completed by the driver (Figure 2.1, p.
nicate with other vehicles 15). This includes fully autonomous vehicles that no longer
require a human driver to operate them, as well as a range
Vehicle to Infrastructure (V2I)—CV
of advanced driver assistance systems (ADAS) that enhance
technology that enables vehicles to
driver safety by taking temporary control of one or more
communicate with the smart infra-
driving functions (speed, lane position, braking, etc.).
structure
A fully autonomous vehicle no longer requires a human
Vehicle to Pedestrian (V2P)—CV tech- operator to drive. Instead, the vehicle navigates streets safely
nology that enables vehicles to com- and efficiently through a complex mix of software and hard-
municate with nearby pedestrians ware that combines remote sensing, recognition algorithms,
network analysis, and “experience” drawn from millions
Vehicle to Everything (V2X)—CV tech-
of hours of driving that is shared across AVs. The vehicle’s
nology that enables all vehicles and
combination of sensors, cameras, light detection and ranging
infrastructure to be interconnected
(Lidar or light radar), high-definition maps, and advanced
Intelligent Transportation System (ITS)— software create a digital picture of its surroundings and make
Advanced technologies that improve
the safety and efficiency of the transpor-
tation system by collecting, analyzing,
and communicating information in real
time
Connected Autonomous Vehicle (CAV)—A
vehicle that has both connected and au-
tonomous capabilities
Shared Autonomous Vehicle (SAV)—An
autonomous vehicle that is available on
a short-term, “as-needed” basis
Figure 2.2. Example of a Lidar cloud (source: Waymo)
16 AMERICAN PLANNING ASSOCIATION www.planning.orgPLANNING FOR AUTONOMOUS MOBILITY
PA S 592, C H A P T E R 2
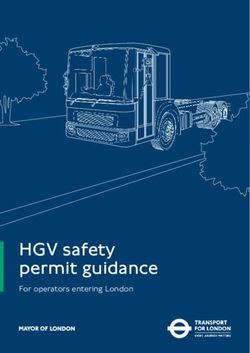
intelligent driving decisions on routing and maneuvering vehicle automation (Figure 2.3, p. 18). These range from “0,”
without any input from an operator or information broadcast where the driver is in complete control of all driving tasks at
by infrastructure or other vehicles. all times, to “5,” where the vehicle is designed to perform all
More specifically, just as radar does with radio waves, Li- driving tasks without an operator (SAE International 2016).
dar shoots pulses of light and measures how long it takes for the With Level 1 automation, the driver remains in control
light to return to the sensor to assess how far away an object is. of the vehicle, but the technology can assist the driver by con-
As seen in Figure 2.2 (p. 16), placing an array of rotating lasers trolling one of the vehicle’s functions, either its speed or lane
on top of an AV provides a continual 360-degree “point cloud” position. Level 2 takes this a step further by allowing the ve-
or picture of the vehicle’s surroundings. The vehicle’s central hicle to control two driving functions at the same time. A ve-
computer can then be programmed to recognize specific Lidar hicle with Level 3 automation can take full control of the ve-
returns as another car, a pedestrian, or even a stop sign. hicle for certain parts of a trip, but the driver must be ready to
Lidar systems are typically supplemented by cameras take back control of the vehicle when the vehicle prompts her.
and other sensors to provide redundant detection systems The vehicle takes full control of all major driving functions in
that will not fail to detect objects that Lidar could miss, par- Level 4. Level 4 vehicles can even drive themselves for the en-
ticularly in the area immediately surrounding the vehicle. tire trip, but they are only able to do so under specific condi-
More sophisticated systems add another layer to this by as- tions. Finally, Level 5 automation refers to fully autonomous
sessing how surrounding vehicles and pedestrians are mov- vehicles that can operate without an operator in all conditions
ing and predicting where they will go next. In the case of a and without the capability for a human to retake control.
pedestrian crossing the street, the vehicle can predict the Automated driving features that aid the driving process
pedestrian’s movements and begin slowing down before the but do not fully control the vehicle (Levels 0, 1, and 2) are gen-
pedestrian enters the street instead of waiting until the pedes- erally referred to as ADAS. Even though fully autonomous
trian is directly in the vehicle’s path. vehicles have received most of the attention and are the focus
Unfortunately, whether an AV uses Lidar or cameras or of this report, ADAS can significantly improve driver safety,
both, it is very difficult for these systems to work properly in thereby improving user mobility. For example, one of the
inclement weather conditions and poor visibility. Rain and most common crash scenarios among aging drivers is mis-
snow can refract the laser returns and cameras struggle to judging oncoming traffic while making a left turn. Simula-
identify objects accurately through precipitation, function- tor studies have shown that even a simple Level 0 automation
ally blinding the AV. However, using both technologies in feature that informs drivers when they have enough space to
tandem could overcome this problem as the technology con- turn left could significantly improve the safety of aging driv-
tinues to advance. ers, thereby enabling them to continue driving and maintain
Most of the attention on AVs is centered around fully their personal mobility later into life (Davidse 2006).
autonomous vehicles because many of the technology’s most Most of the first applications of AV technology will be
significant effects on the transportation system and the built increasingly sophisticated ADAS. Even Tesla’s Autopilot fea-
environment will only be viable when fully autonomous ve- ture, introduced in 2015, would be classified as Level 2 auto-
hicles are adopted. However, AV technology includes a range mation, as it only controls the vehicle’s speed and lane posi-
of levels of automation. It is important for planners to be fa- tion and requires the driver to be “in control of the car” at
miliar with the full array of AV technology, because many all times (Tesla 2015). Consequently, it is vital for planners
semiautonomous features and applications are already avail- to be aware of the development and use of these features to
able today and will likely play a major role in the transition to take advantage of the benefits they can provide and to effec-
a fully autonomous world. tively manage the transition from human-driven vehicles to
In addition to fully autonomous vehicles, there is a wide vehicles equipped with ADAS to fully autonomous vehicles.
range of automated technologies that can operate as stand-
alone features. These range in sophistication and complex- Connected Vehicle Technology
ity from cruise control to autopilot. To classify these ever- Connected vehicle (CV) technology includes the vehicles and
evolving technologies, the National Highway Traffic Safety infrastructure that enable vehicles to communicate with other
Administration (NHTSA) and the Society of Automotive vehicles, infrastructure, or pedestrians to make better driving
Engineers (SAE) International developed a classification decisions. CV technology relies on information gathered by
system that divides automated technologies into six levels of vehicles and the transportation infrastructure about real-time
www.planning.org AMERICAN PLANNING ASSOCIATION 17PLANNING FOR AUTONOMOUS MOBILITY
PA S 592, C H A P T E R 2
Figure 2.3. The levels
of vehicle automation
Five Levels of Vehicle Autonomy
(SAE and NHTSA)
Level 0 Level 1 Level 2 Level 3 Level 4 Level 5
No automation: Driver Assistance: Occasional Limited Full self-driving Full self-driving
the driver is in the vehicle can self-driving: self-driving: under certain under all
complete control assist the driver or the vehicle can take the vehicle is in full conditions: conditions:
of the vehicle at take control of control of both the control in some the vehicle is in the vehicle can
all times. either the vehicle's speed and situations, full control for the operate without
vehicle's speed, lane position in monitors the road entire trip in these a human driver
through cruise some situations, for and traffic, and conditions, such or occupants.
control, or its lane example on will inform the as urban
position, through limited-access driver when he or ride-sharing.
lane guidance. freeways. she must take
control. Source: SAE & NHTSA
operations of the transportation network. Based on a specific they begin slowing down or turning. This would enable AVs
vehicle’s location, information is broadcast to the vehicle so to travel in even safer harmony.
the driver is able to make informed decisions regarding rout- Like ADAS, applications of CV technology will be im-
ing and maneuvering. Yet, by itself, this technology does not plemented well before fully autonomous vehicles are adopt-
impact safety-critical functions of the vehicle and the driver ed. In 2016, the U.S. Department of Transportation awarded
must remain in full control of the vehicle at all times. New York City, Tampa, and Wyoming more than $45 million
Simple examples of CV technology include transmit- in collective funding to “design, build, and test” operational
ting information typically given on street signs to a heads- CV systems through the CV Pilot Development Program
up display in the vehicle. For instance, a sensor embedded (U.S. DOT 2016). As part of this program, Tampa will have
in the roadway could tell the vehicle what the speed limit is 10 buses, 10 streetcars, and 1,600 personal vehicles equipped
at all times or it could provide a warning whenever the ve- with CV technology on the road by 2018 (Tampa Hillsbor-
hicle begins traveling the wrong way down the road. More ough Expressway Authority 2017). In addition, companies
sophisticated examples could include an ambulance warning such as Peloton and Daimler are already piloting connected
other vehicles to move out of the way or platooning, in which semi-truck applications on highways across the country that
two or more vehicles “link” and travel together like a train. promise to significantly improve the fuel efficiency of the
The driver remains responsible for using this information to trucking industry.
operate the vehicle, but the information provided helps the CV technology is generally divided into three major
driver to make safer and better-informed driving decisions. types: Vehicle-to-Vehicle (V2V), Vehicle-to-Infrastructure
AV and CV technology could each provide positive safety (V2I), and Vehicle-to-Pedestrian (V2P) communication.
and efficiency benefits to the transportation system on their These technologies are not mutually exclusive, meaning that
own, but it is commonly accepted that the most significant a single vehicle can be equipped with more than one type of
benefits will only be achieved by vehicles that are both au- CV. Vehicles equipped with all three are considered to have
tonomous and connected. For example, a fully autonomous Vehicle-to-Everything (V2X) capabilities, as these vehicles
vehicle can safely navigate a traffic jam, but a connected AV would be able to communicate with anything that may affect
could avoid the traffic jam altogether by finding the fastest their operation in real time. In many cases, several redundant
alternative route in real time. In addition, CVs could inform systems will likely need to be in place to ensure uninterrupted
other vehicles they intend to brake or change lanes before communication in the event of a system failure.
18 AMERICAN PLANNING ASSOCIATION www.planning.orgYou can also read