Linear Frequency Domain Method for Aerodynamic Applications - ECCOMAS 11 - January 2021, Paris - DLR
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

1 ECCOMAS 11. - 15. January 2021, Paris Linear Frequency Domain Method for Aerodynamic Applications M. Widhalm, P. Bekemeyer, R. B. Seidler, S. Marten Institute of Aerodynamics and Flow Technology Braunschweig, Germany
2
Flight
Derivatives of Unsteady air loads Dynamic
Motivation Analysis
Air load derivatives in form of
Integral values
Surface distributions Aeroelasti many
city more, …
Used as input for many applications
Rigid/Flexible a/c
Extend flight envelope
Stability &
Actuation
Excitation signals Control
Damped harmonic oscillation
Gust response (1-cos)
Pulse
Remain compressibility and viscosity
Input Signal
DLM(VLM) - URANS - Frequency
periodic/a-periodic
Domain Method
s
3
Linear Frequency Domain Solver (LFD)
Numerical approach
Small perturbation approach, periodic motion, harmonic response
W … conservative flow state vector
AAAES3icjVPdbtMwFE7XDUYZbINLbiwqUCdBlZRVTAKkSfSCy4HWdVJTKsd2OmvOj+zTLZXlR+A1eBsegOfgDnGBnUaMtBPCUqLj8/3kS3wS5YIr8P3vjY3m5tadu9v3Wvd3Hjzc3dt/dKayuSRsSDKRyfMIKyZ4yobAQbDzXDKcRIKNosv3Dh9dMal4lp7CImeTBM9SHnOCwbame19HHThAL1GYWZYz0SOD3qHwmlMGXFC3d4znIc5zmRUoBFaA/sSwMJ2SdYHBadhnza1LwmYYgTlohWGrqKwjLHVRui4di384Ordi3W261/a7frnQehFURdur1sl0f+NLSDMyT1gKRGClxoGfw0RjCZwIZlrhXLEck0s8Y2NbpjhhaqLLD2rQM9uhKM6kvVJAZfdvhcaJUosksswEw4VaxVzzVsx1IMuEqgegVzxXVYRimaEmU3yecihWUkN8NNE8zefAUrIMHc8Fggy5k0aUS0ZALGyBieT2vRG5wBITsPPQClN2TbIkwSnVIeWx0aELJxNNjamjgxtsYLE6CLSghRn3JjqMrXfphdqBqYreqhnQGwH9L8Xp6hMGS/bgFu4qNXfnjcVS8GezLlvLpADVxbVGaUBZbP+X8rS0YngmGUuNlrPIaL8bHL2w89nvu/urQ+MGOFgd1/XirNcN+l3/42H7uFeN8rb3xHvqdbzAe+0dex+8E2/okcZOo9d403jb/Nb80fzZ/LWkbjQqzWOvtja3fgONsG7j
W (t) f (t) ⇡ Real(W
W =W c ei!t )
x(t) x̄ = x̃(t) ⇡ Real(x̂ei!t ) x … grid-node vector
Semi-discrete URANS (Spalart-Allmaras one equation turbulence model)
M … mass (cell volume) matrix
d(M(x)W )
AAAG7HiclVRdaxNBFJ1WG2v8avXRl8FQSGgMu0FR0UrBPPgiVLFJIRvKZHY2GTr74cxsumXZHyH4Jr4K/gJf9Wf4b7z7kba7WUUXAnfuPefMnDuTOw0EV9owfq2tX7m60bi2eb154+at23e2tu8OlR9Kyg6pL3x5NCWKCe6xQ821YEeBZMSdCjaanrxK66MFk4r73nt9FrCJS2YedzglGlLHW7uWtiM7ittv2lFn1ElineBd/A63R10cdbFl+zqOkg7ew0bzeKtl9Izsw6uBWQQtVHwHx9sb30CAhi7zNBVEqbFpBHoSE6k5FSxpWqFiAaEnZMbGEHrEZWoSZ64SvAMZGzu+hJ+ncZa9zIiJq9SZOwWkS/RcVWtpsq42DrXzdBJzLwg182i+kRMKrH2ctgjbXDKqxRkEhEoOZ8V0TiShGhpZ2iXV1r4vVNLE1Xyg3aicHitKBLP3es+MSTxnYsF0hUfhWjmTkMWWx06p77rEs2PL5k4SW6mqdGM7WakPLtcHUC9VHc6EnYzNSQ6ZTuOWmYBtLNmHELwqDN1Ke6zKvABIfSA5YB1W6a0RAdSLuF/dSpcocGyc4bNgBaxK4MESPFiCy+gF3ElmonDhZC6qqOw1/8cZqvDCGb5ss46WsswqywrmxNO+m52spLVC/zs/WqE3d9rp6yESB9K3Q6q7+MXLh56vs/9xpa8ATFG5L8EcbQnizQQDqW6rjy3JZ3NtySxXvZOCu8jJy2XW/sJWFkFH4AVxj4rQhgeUXg78UYmU/qmqVxzWKOoLSZ1rNndyqXOfq4+gbK0NprClOUwOfO6tk9TTClfL5R9c4X+xtdQY1kjW2ZpJYnOYg10ss0tjXRgvMJlnkOOsrD1Iwfn70CzSyomzhNVtmdbzirUBqJSg6boeCRuXkOl6iUyHu1kd5avBsN8zH/eMt49a+/1izG+i++gBaiMTPUH76DU6QIeIoo/oO/qBfja8xqfG58aXHLq+VnDuodLX+Pob8mByeA==
+ R(W, x, ẋ) = 0
dt R … spatially discretised residual
Consistent linearisation - complex-valued linear system of equations
✓ ◆
∂R b ∂R ∂R ∂M
AAAHqXiclVTbbhMxEN0AJSXcCjzyYhFVKmqoshEIEBQVkQdeigqiF5ENleP1JhbeS+3ZNtVq+R8+iT/gMxh7N013ExCsFMken3PGxzOZUSKFhm73Z+PK1Wsr15urN1o3b92+c3ft3v0DHaeK8X0Wy1gdjajmUkR8HwRIfpQoTsOR5Iejb+/M+eEpV1rE0Wc4T/gwpONIBIJRwNDx2i9P8gAGRHhxyMf0a+ZpoConXowsI5rt5mSTeP7Un2af8uwQj5QYT2BIvDPh8wkFE9smT0ih1Jpjp4a5IGxQG3OQ58eAyJyYLBdJTRqL2LUyRcrH89QmrYmfpNQvo1Sp+KyMZG/z2vVGx2vt7lbXfmRx4ZaLtlN+e8f3Vn7g3Vga8giYpFoP3G4Cw4wqEEzyvOWlmieUfaNjPsBlREOuh5ktSU7WMeKTIFb4i4DY6GVGRkOtz8MRIkMKE10/M8FlZ4MUghfDTERJCjxiRaIglQRiYupLfKE4A3mOC8qUwLsSNqGKMsAuqGQx2hDHUudYs1o8gXBaDQ80o5L721svu8NswuUphxqPYU8KrjBKvIifsTgMaeRjgUWAZTaqKsz8fOG8f/m8j+eV00Bw6ecDd1hARqOs7WK3rBPFT1L0qgm+lnljXeUlSOohKUDruDNVoxKp83WvngoqFLw2sXi7WADrCrg/A/dn4Cr6FGtiTZQuAuuijgLT8v9xhzq8dEYu21xGMyy3zvKSCY0gDu3NKloL9L/zpwv01vqG6R6qSKJiP2XQIa/fPIlisEOo9q4INKjClxkWnqTRWHKU6rR75Z/dUzZWr0nJPS3Is619/tKWXeGLYAeJiMnUxwYyxcE/qh0gerniwRJFmEtCodlaL6QufC42QdXaBpoiHgicHOTC2+N8Oa10Ndv+wRX5F1szjYMlkstsjRX1Bc7BDlG2aLyD4wVn9Rhjgle1+wZc9AfwKeggswGv03a9VzVrfVSpQM1+ORITV5BmP0O2cLi79VG+uDjobbnPtrofn7Z3euWYX3UeOo+cDcd1njs7zntnz9l3WONDAxp543tzs/mxedT8UkCvNErOA6fyNdlvoPe6fg==
iw ? M + W= + iw ? +W x̂ ! b =b
AW
∂W ∂x ∂ ẋ ∂x
Solution scheme: Direct solver, ILU-preconditioner, Krylov-GMRes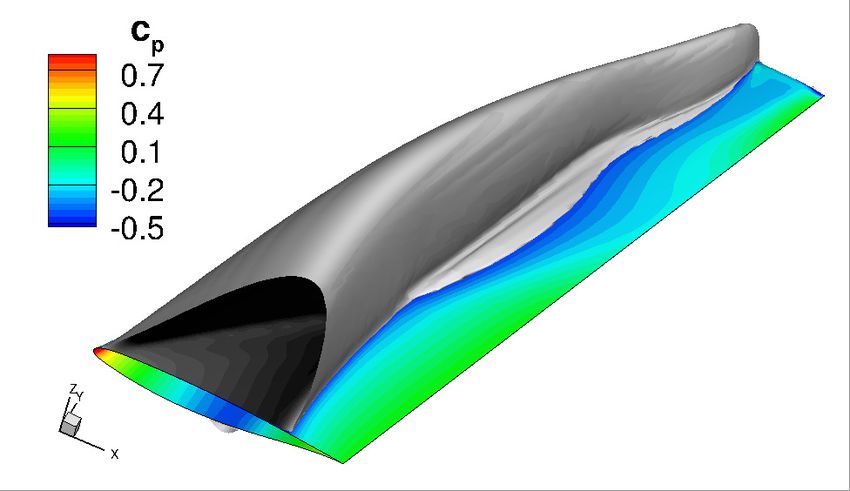
4
Input for Aeroelasticity Analysis
Complex-valued Surface Distributions
LANN CT9 - transonic/partly separated flow
M = 0.82, Re = 7.3x106, α = 2.6°, red. f = ω* = 0.2
Harmonic pitch oscillations, α(t) = α0 sin(ω t)
LFD/URANS - Experiments, y/b = 0.2
LFD LFD
-25 URANS, amp=0.01 -25
URANS, amp=0.01
URANS, amp=0.25 URANS, amp=0.25
-20 EXP, upper side -20 EXP, upper side
EXP, lower side EXP, lower side
-15 -15
-10 -10
Re Cp
-5 Im Cp -5
0 0
5 5
10 10
0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1
x/c x/c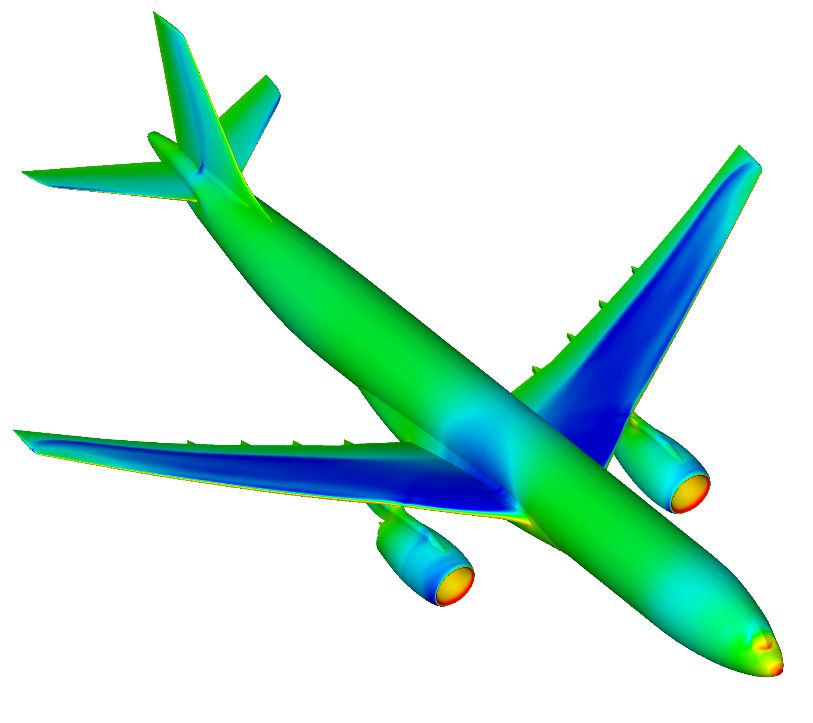
5
Stability & Control
Steady-state static and dynamic Derivatives
DLR-F12 wind tunnel experiment
U = 70 m/s, Re = 1.28x106, α = 0° 0
Clβ
2.5
Cnβ
0
CYβ
Sinusoidal, f = 3 Hz, ω* = 0.068 Exp., DNW-NWB
LFD, yaw
-0.5 2 -0.2
FD RANS, yaw
Pitch - Roll/Yaw
-1 1.5 -0.4
-1.5 1 -0.6
-2 0.5 -0.8
-2.5 0 -1
-1 0 1 2 3 4 5 6 7 -1 0 1 2 3 4 5 6 7 -1 0 1 2 3 4 5 6 7
α [deg] α [deg] α [deg]
Clr - Clβ. Cnr - Cnβ. CYr - CYβ.
8 2 5
7
0 4
6
Exp., DNW-NWB
-2 LFD, yaw 3
5 URANS, yaw
4 -4 2
3 -6 1
2
-8 0
1
-10 -1
0
-1 -12 -2
-1 0 1 2 3 4 5 6 7 -1 0 1 2 3 4 5 6 7 -1 0 1 2 3 4 5 6 7
α [deg] α [deg] α [deg]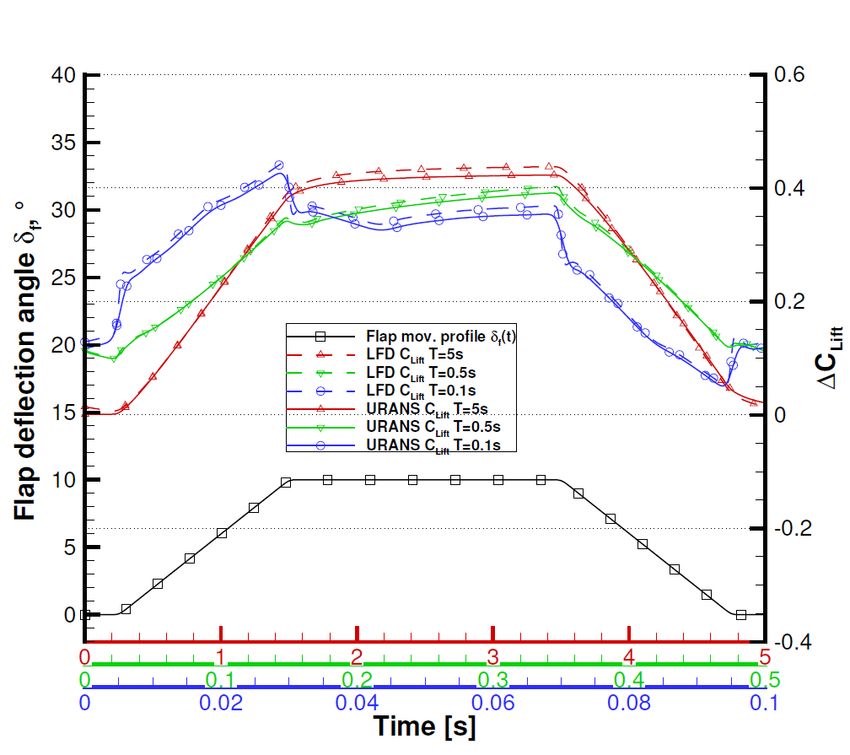
6
Stability & Control
Flight dynamic stability
DLR-F12 wind tunnel experiment
U = 70 m/s, Re = 1.28x106, α = 0°
Longitudinal and lateral/directional
aircraft modes
Comparison between Vortex-Lattice
(VLM) and LFD method obtained
aircraft modes
VLM
Inviscid + incompressible
LFD
Viscous + compressible7
Stability & Control
Control surface derivatives
Fowler and a plain flap
M = 0.18, Re = 20x106, α = 0°
Deflection of the flap is implemented
as a deformation in the mesh for the
LFD-Solver
Frequencies from 0 to 40 Hz Lead
Magnitude describes the Control
derivative of the flap Lag
Phase shift describes the Time Lead Increased
and Lag of the flap efficiency
LFD gives full frequency response and
Reduced
allows the computation for arbitrary efficiency
flap deflections in the time domain
Frequency response of the aileron8
Stability & Control
Control surface derivatives
Arbitrary flap deflections
M = 0.2, Re = 25x106, α = 2°
A-periodic predefined flap motion -
black
Different time scales
t = 5 s, t = 0.5 s, t = 0.1 s
Steady/Unsteady effects
Linear combination of n times LFD(f)
solutions
Good agreement in terms of
accuracy even for strong unsteady
aerodynamic effects in the flow9 A-periodic signals - Gust XRF1 Gust Response simulations Results over reduced frequency range Transonic flow conditions featuring a shock Lift and pitching moment coefficient
10
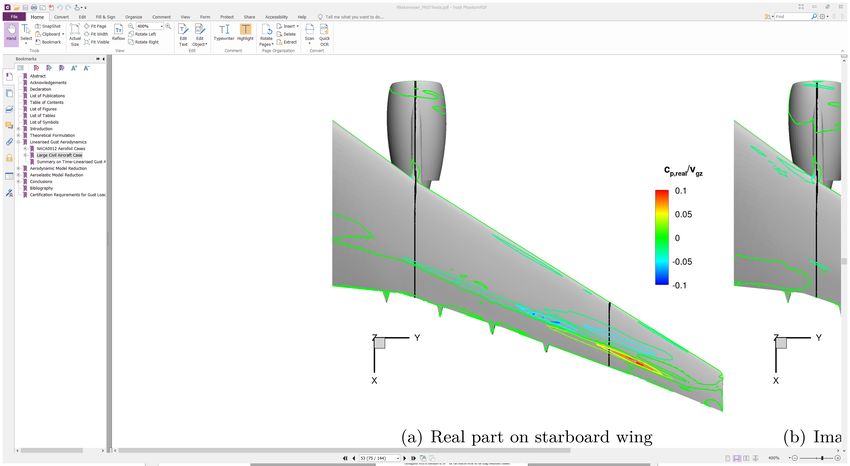
A-periodic signals - Gust
XRF1 Gust Response simulations
Complex surface pressure distributions
for reduced frequency of 0.53
Slice for Cp11
A-periodic signal - Actuation
Constant and Sinusoidal blowing
Blowing NACA4412 - single slot
Static/Dynamic derivatives
α [deg] U [m/s] T [K] p [Pa] Re c
0/6/12 92.6 288 101325 6.3 x 106 1
Static Dynamic12
Application - Actuation
Pulsed blowing - Pulse Train
Blowing NACA4412 - single slot
Time signal recovery with 15 LFD
simulations for pulse train
Linear combination of each single
harmonic LFD simulation based on
Discrete Fourier Transform (DFT) -
weights
LFD relies on small perturbations
approach
Shape is well resolved
Magnitude of lift decrease is over-
predicted13 > LFD > Markus Widhalm > 2020
Conclusion
Linear Frequency Domain method (LFD) - Small perturbation approach
LFD provides a speed-up of about 2 orders of magnitude with the
accuracy of URANS for small perturbations of motions
RANS (viscosity) properties remain
Good agreement of LFD results in comparison with URANS for harmonic
oscillations
Consistent linearisation of the Jacobians
Linearization of turbulence model is a key feature
Robust method, almost inherent of excitation frequency
Preconditioner and Krylov-GMRes dramatically increase the
robustness compared with multigridding
Direct solver: Trade off between robustness and memory usage
Viscosity/Turbulence
Important to be included - Separation14 > LFD > Markus Widhalm > 2020
Outlook
Damped harmonic oscillator - LFD
Problem reduction of complex aerodynamic system important for many
unsteady applications
Further applications of small disturbance RANS-based LFD method
Control circuits - Frequency response functions/modulation
Control surfaces - ailerons, rudder, elevator, ….
Air load alleviation - Active flow control - Energy efficiency
Optimisation including Stability & Control
MDO - air loads (LFD - ROM) - Uncertainty quantificationYou can also read