Real-time 3D flight track and flight simulation based on Google Earth
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Real-time 3D flight track and flight simulation based on Google Earth
TANG Yong, WU Honggang, LIU Pengfei, SI Quan
Real-time 3D flight track and flight simulation based on Google Earth
1,2
TANG Yong, 2WU Honggang, 2LIU Pengfei, 2SI Quan
1
Civil Aviation College, Nanjing University of Aeronautics and Astronautics, Nanjing, China
2
R&D Center, The Second Research Institute of CAAC, Chengdu, China
tangyong1979@126.com
Abstract
This paper proposed a novel method of real-time 3D flight track and 6-DOF flight simulation based
on secondary development of Google Earth. Real-time 3D flight track and 6-DOF flight simulation,
described by KML markup language, were presented by introducing real-time surveillance data of
flight into Google Earth via its extendable interface. The system was built on B/S architecture, and the
entire development was put on the server while the clients used Google Earth browser directly.
Because there were no flight attitude in surveillance data, An algorithm to extract flight attitude from a
space vector, which was connected by two pre and post track points, was proposed. The results show
that 3D flight track derived by this way is simple and intuitionistic, which can be applied to the
research and analysis of 3D flight track, real-time flight track and 6-DOF flight simulation.
Keywords: 3D Flight Track, 6-DOF Flight Simulation, Google Earth, Attitude Extraction
1. Introduction
3D flight track has important significance for flight conflict research, airspace layout, flight
simulation and flight accident investigation. Usually, OpenGL is used to draw 3D track [1,2],
Creator is used to create 3D building and Vega is used to generate 3D visual scene in 3D flight
track simulation [3,4], and the 3D flight simulation is aimed at a special area.
In this paper, Google Earth is used as a development platform. Google Earth is a virtual
globe, map and geographical information program that was originally called EarthViewer 3D,
and was created by Keyhole, Inc. Google Earth lets you fly anywhere on Earth to view satellite
imagery, maps, terrain, 3D buildings, from galaxies in outer space to the canyons of the ocean.
Google Earth provides satellite imagery, maps, terrain, 3D buildings and real-time weather.
Google Earth is a well-known interactive software application for viewing maps of the Earth
that is free and easily available from the Google website. Google Earth can be used as a tool and
software development platform in many applications, because it also provides secondary
development interface [5-9]. And Google Earth has been used in some science research [10,11].
This paper introduces a novel method to realize 3D flight tracking and 6-DOF (Six degrees
of freedom) flight simulation based on Google Earth, which does not need to construct 3D
terrain model, generate 3D visual scene and draw 3D track. The flight track will be described by
KML markup language and the system is built on B/S architecture. 6-DoF refers to motion of a
rigid body in three-dimensional space, namely the ability to move forward/backward, up/down,
left/right (translation in three perpendicular axes) combined with rotation about three
perpendicular axes (heading, pitch, roll) [12].
2. System design
2.1. KML language
Keyhole Markup Language (KML) is an XML notation for expressing geographic annotation
and visualization within Internet-based, two-dimensional maps and three-dimensional Earth
browsers. KML was developed for use with Google Earth, which was originally named Keyhole
Earth Viewer. It was created by Keyhole, Inc, which was acquired by Google in 2004. KML is
an international standard of the Open Geospatial Consortium. Google Earth was the first
program able to view and graphically edit KML files [13, 14].
International Journal of Digital Content Technology and its Applications(JDCTA) 385
Volume6,Number19,October 2012
doi:10.4156/jdcta.vol6.issue19.47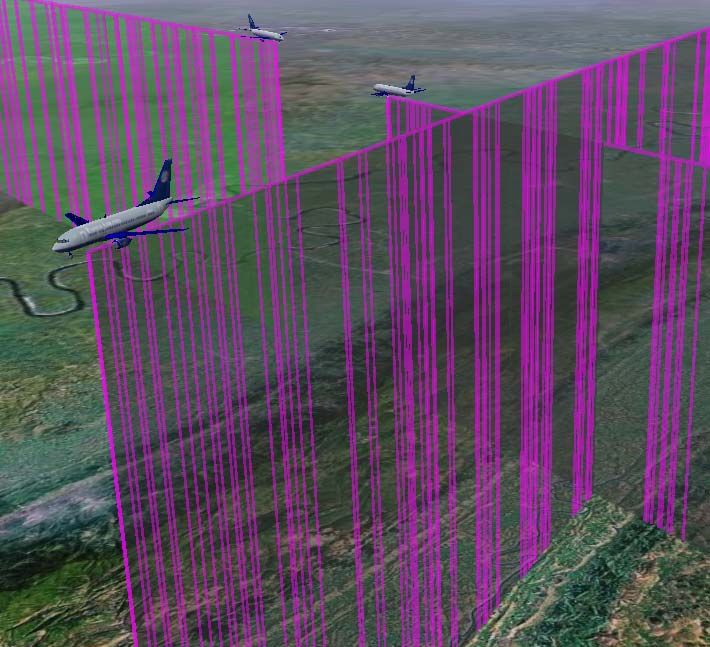
Real-time 3D flight track and flight simulation based on Google Earth
TANG Yong, WU Honggang, LIU Pengfei, SI Quan
KML files are very often distributed in KMZ files, which are zipped files with a .kmz
extension. The contents of a KMZ file are a single root KML document (notionally "doc.kml")
and optionally any overlays, images, icons and 3D models referenced in the KML including
network-linked KML files. Here is an example of KML file which describes a point (longitude=
-1.82675, latitude=51.179045, altitude=0):
Simple placemark
-1.82675, 51.179045, 0
Geographic features can be presented by several lines of KML codes because KML file is
text-formatting. Layers are an important feature of Google Earth, which provide access to all
kinds of other data for Google Earth. All kinds of information including videos, photos, real-
time weather, 3D building and more can be presented by KML and displayed in different Layers.
Google Earth processes KML files in a way that is similar to how web browsers process
HTML and XML files. KML syntax tells Earth browsers like Google Earth how to display
geographic features such as points, lines, images, polygons, and models. KML file is a kind of
interface for Google Earth secondary development [13,14].
2.2. System structure
Fig.1 shows the system structure. Real-time flight track data can come from SSR (Secondary
surveillance radar) and ADS-B (Automatic Dependent Surveillance-Broadcast).ADS-B is an
advanced technique that integrates data communication, satellite navigation and surveillance
technique. The aircraft equipped with ADS-B airborne avionics regularly broadcast position,
velocity and identification data obtained from GNSS (Global Navigation Satellite Systems).
SSR locates aircraft through measuring range and direction of aircraft by transmitting
enquiry signal to aircraft and receives reply signal from aircraft's transponder[15-17].
KML UDP UDP
Google Earth Data Source
Interface
Browser Web Server/CGI (ADS-B, SSR,
Program
etc.)
Figure 1. System Structure
Flight track data from surveillance source (such as SSR, ADS-B etc.) are sent to interface
program with UDP protocol. Interface program extracts flight number, position (longitude,
latitude and altitude) from flight track data and extracts attitude from position. The flight
number, position, attitude, etc. of an aircraft are coded and sent to web server. When web server
received UDP message, CGI program will process surveillance data, creates visualization
objects, and exported them to KML files which can then be displayed by Google Earth..Clients
will obtain real-time 3D flight track and 6-DOF flight simulation if they access web server.
386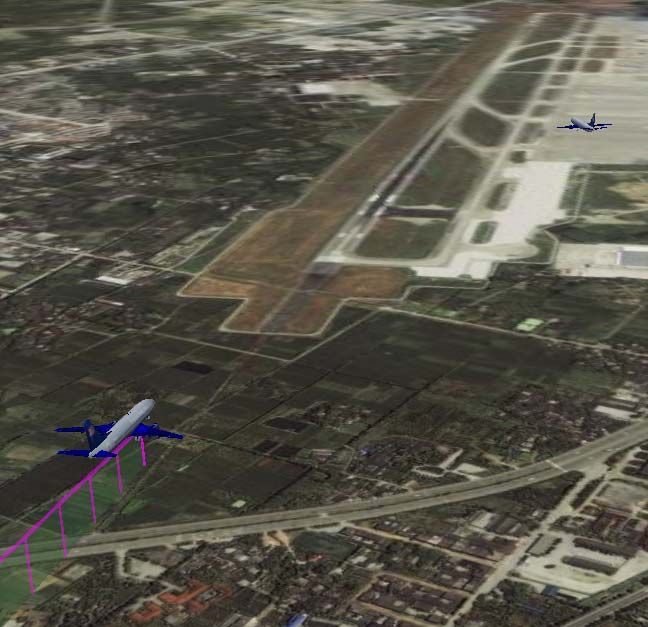
Real-time 3D flight track and flight simulation based on Google Earth
TANG Yong, WU Honggang, LIU Pengfei, SI Quan
2.2. Attitude extraction
Surveillance data (ADS-B or SSR) only contain aircraft position coordinates (longitude,
latitude, altitude) without attitude coordinates (heading, pitch, roll). But the 6-DOF flight
simulation needs attitude, so attitude coordinates must be extracted from position coordinates.
Roll can be set zero because strong rolling motions of civil aircrafts seldom happens. Especially
on airport surface, there is no rolling motion. As shown in Fig.2, pitch and yaw can be extracted
by the connection of two pre and post track points to compute the space vector.
A mathematical figure approximating the shape of the Earth is an ellipsoid. Tangent plane to
the Earth ellipsoid at the aircraft position must be computed firstly. In Fig.2, O is the origin
point of the Earth ellipsoid, OZ points North Pole. Suppose the two pre and post track points
are P1 {x1 , y1 , z1 } , P2 {x 2 , y 2 , z 2 } , respectively, S is the tangent plane to the Earth
ellipsoid at point P1 , vector N points due-north and P3 is the projective point of point P2 . The
angle h between place P1 P3 and N is heading, and the angle p between place P1 P3 and
P1 P2 is pitch.
Z
P2
ZO
N
P3P3
p E
h
S
P1
O
Figure 2. Pitch and roll computation
Here is the calculation formula:
(1) Computation of vector N
The intersection Z O of N and Z-axis can be computed firstly,
Z O OP1 / cos( ) , where is the angle between OZ and OP2
Then,
N OZ 0 OP1
387
Real-time 3D flight track and flight simulation based on Google Earth
TANG Yong, WU Honggang, LIU Pengfei, SI Quan
(2) Computation of point P3
Because line P2 P3 / / OP1 , point-direction form straight-line equation of line P2 P3 is:
( x x 2 ) / x1 ( y y 2 ) / y1 ( z z 2 ) / z1 t ○
1
Point-normal form place equation of tangent place at point P1 is:
x1 ( x x1 ) y1 ( y y1 ) z1 ( z z1 ) 0 ○
2
P3 can be obtained by solving the simultaneous equations ○
1 and ○
2 .
(3) The angle p between place P1 P3 and P1 P2 is pitch, then
p arccos P1 P3 , P1 P2
(4) The angle h between place P1 P3 and N is heading, then
h arccos P1 P3 , N
(5) Heading quadrant
As shown in Fig.3, the angle between vector P1 P3 and vector E (due-north) will
determine in which quadrant will heading lie.
Because E N OP1 , then
If the angle between P1 P3 and E < 90 degrees,
heading h .
If the angle between P1 P3 and E > 90 degrees,
heading 360 h . o
N
P3 P3
h >90°Real-time 3D flight track and flight simulation based on Google Earth
TANG Yong, WU Honggang, LIU Pengfei, SI Quan
3. Application
The Second Research Institute of CAAC has developed 1090ES ADS-B ground station and
installed 8 ground stations at Chengdu Shuangliu International Airport(ICAO code: ZUUU) and
around. ZUUU surface and 300Km airspace surrounding can be ADS-B coveraged. ADS-B data
have been used as surveillance data source in simulation. The real-time 3D track and 6-DOF
flight simulation are shown in Fig.4~7.
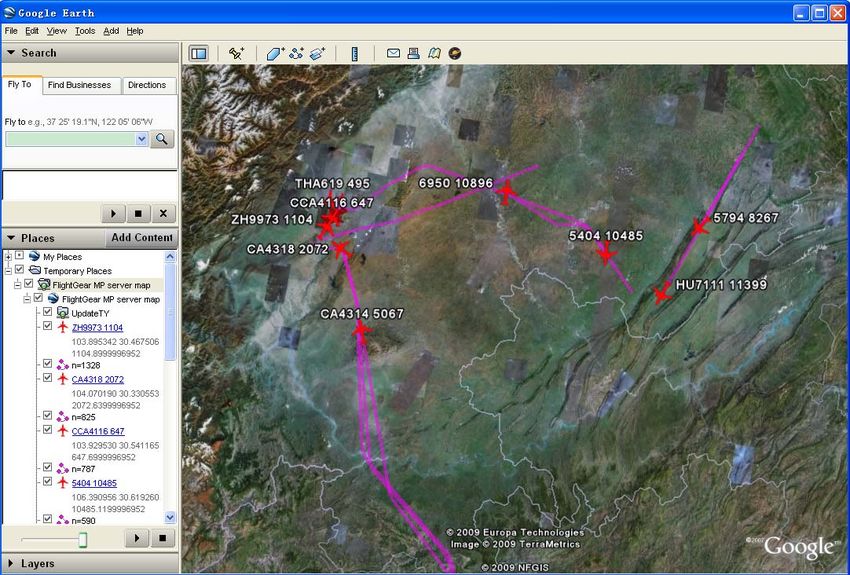
Fig.4 shows 2D tracks, aircrafts are presented by red image. 2D tracks are used to display
regional air traffic situations. Fig.5~7 show 3D flight tracks, the 3D tracks are presented by
space lines which are connected by track points. In Fig.5, an aircraft is taking off at airport
ZUUU. In Fig.6, an aircraft is landing. Fig.7 shows en rout aircrafts.
The flight attitudes, showed in Fig.5~7, are consistent with aircraft motions which indicate
that attitude extraction algorithm is correct and effective.
Figure 4. 2D flight track
Figure 5. Taking off aircraft at airport ZUUU
389Real-time 3D flight track and flight simulation based on Google Earth
TANG Yong, WU Honggang, LIU Pengfei, SI Quan
Figure 6. Landing aircraft at airport ZUUU
Figure 7. En route aircrafts
4. Conclusion
This paper introduces a novel method to realize 3D real-time flight track and 6-DOF flight
simulation base on Google Earth secondary development. The system is built on B/S
architecture, and the entire development is put on the server. Google Earth is used as Client
390Real-time 3D flight track and flight simulation based on Google Earth
TANG Yong, WU Honggang, LIU Pengfei, SI Quan
software, which makes the system universal. It doesn’t need to construct 3D terrain model,
generate 3D visual scene and draw 3D track.
The main works and results obtained are as follows:
(1) Use Google Earth as a simulation platform. 3D flight track can be described by KML
language.
(2) Real-time aircraft surveillance data are introduced into Google Earth to display.
(3) Aircraft attitude is extracted from aircraft position by connecting of two pre and post
track points to compute the space vector.
(4) Real-time 6-DOF flight simulation, aircraft presented by 3D model.
The system can be used in 3D flight track analysis, real-time flight track and 6-DOF flight
simulation. Live weather is now available in Google Earth. The system can help public
understand flight delay because of bad weather. 3D flight track derived by this way is simple
and intuitionistic, which could not only be applied to the research and analysis of 3D flight
track, real-time flight track, 6-DOF flight simulation, but also be used as a new query tool of
flight information.
5. Acknowledgements
This research is supported by the National Science and Technology Pillar Program of
China (Grant No.2011BAH24B05, 2011BAH24B06) and the National Natural Science
Foundation of China (Grant No.61079006, 61179060).
6. References
[1] ZHU Zhifeng, YU De-yi, “3D Animation of Aircraft with OpenGL Technology”, Computer
Simulation, vol.22, no3, pp.194-196, 2005
[2] TIAN Tian, CAO Ning. “3D Dynamic Simulation of Radar Target Track Based on OpenGL”,
Journal of Hohai University Changzhou, vol.20, no.2, pp.30-33, 2006
[3] LIANG Wei, LI Xinguo, “3D trajectory planning and visualization simulation for helicopter”,
Computer Aided Engineering, vol.17, no.2, pp,73-76, 2008
[4] QIU Zhenyu, ANG Hong-yu, LIU Qiang, “Optimal Flying Trail Simulation on Three-dimensional
Terrain”, Computer Simulation, vol.25, no.2, pp.59-62, 2008
[5] Martin C Brown, Hacking Google Maps and Google Earth, Wiley Pub., USA, 2006
[6] Aydin Eresenl, Nevrez Imamoglu, Mehmet OEnder Efe, “Autonomous quadrotor flight with
vision-based obstacle avoidance in virtual environment”, Expert Systems with Application, vol.39,
no.1, pp.894-905, 2012
[7] Tsuyoshi Honjo, Kiyoshi Umeki, Darhsiung Wang, Pinan Yang, Hanching Hsieh, “Landscape
Simulation and Visualization on Google Earth”, The International Journal of virtual Reality, vol.
10, no.2, pp.11-15, 2011
[8] Luca Postpischl, Peter Danecek, Silvia Pondrelli, “Standardization of seismic tomographic models
and earthquake focal mechanisms data sets based on web technologies, visualization with keyhole
markup language”, Computers & Geosciences, vol.37, no.1, pp.47-56, 2011
[9] Dan Namowitz, “Google Earth helps tackle Kansas airport obstructions”, AOPA Pilot, vol.54,
no.9, pp.17-17, 2011
[10] LI Chengfan, YIN Jingyuan, BAI Chunsong, ZHAO Junjuan,YE Feiyue, "An Object-oriented
Method for Extracting City Information based on High Spatial Resolution Remote Sensing
Images", IJACT: International Journal of Advancements in Computing Technology, vol.3, no.5,
pp.80-88, 2011
[11] LI Chengfan, YIN Jingyuan, ZHAO Junjuan, YE Feiyue, "An Improved Independent Component
Analysis Method for Ground Targets Information Identification", JCIT: Journal of Convergence
Information Technology, vol.6, no.9, pp.169-177, 2011
[12] YUAN Yanwei, ZHANG Xiaochao, MAO Wenhua, ZHAO Huaping, “Virtual Reality Technology
of Ultra-low Altitude UAV”, Transactions of the Chinese Society for Agricultural Machinery,
vol.40, no.6, pp.147-152, 2009
391Real-time 3D flight track and flight simulation based on Google Earth
TANG Yong, WU Honggang, LIU Pengfei, SI Quan
[13] Lisa M. Ballagh, Bruce H. Raup, Ruth E. Duerr, Siri Jodha S. Khalsa, Christopher Helm, Doug
Fowler, Amruta Gupte, “Representing scientific data sets in KML: Methods and challenges”,
Computers & Geosciences, vol.37, no.1, pp.57-64, 2011
[14] Declan G. De Paor, Steven J. Whitmeyer, “Geological and geophysical modeling on virtual globes
using KML, COLLADA,and Javascript”, Computers & Geosciences, vol.37, no.1, pp.100-110,
2011
[15] Air Traffic Management Bereau of Civil Administration of China, “Future development plan of
Chinese civil air traffic management”, 2007
[16] ZHANG Xuejun, ZHANG Qishan, “Data fusion of ADS-SSR in air traffic management”,Journal
of Beijing University of Aeronautics and Astronautics, vol.27, no.4, pp.24-27, 2001
[17] BAI Song Hao, “Variable period updating algorithm of multiradar and ADS data fusion”,Journal
of Traffic and Transportation Engineering,vol.2,no.2, pp. 19-23, 2007
392You can also read