Feldkamp and circle-and-line cone-beam reconstruction for 3D micro-CT of vascular networks
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Phys. Med. Biol. 43 (1998) 929–940. Printed in the UK PII: S0031-9155(98)90633-9
Feldkamp and circle-and-line cone-beam reconstruction for
3D micro-CT of vascular networks
Roger H Johnson†‡§, Hui Huk, Steven T Haworth‡¶, Paul S Cho+ ,
Christopher A Dawson†‡¶ and John H Linehan†‡¶
† Biomedical Engineering Department, Marquette University, PO Box 1881, Milwaukee,
WI 53201, USA
‡ Research Service, Zablocki VA Medical Center, Milwaukee, WI 53295, USA
§ Departments of Radiology and Biophysics, Medical College of Wisconsin, 9200 West
Wisconsin Avenue, Milwaukee, WI 53226, USA
k Applied Science Laboratory, GE Medical Systems, PO Box 414, NB-922, Milwaukee,
WI 53201, USA
¶ Department of Physiology, Medical College of Wisconsin, Milwaukee, WI 53226, USA
+ Departmnet of Radiation Oncology, University of Washington School of Medicine, Seattle,
WA 98195, USA
Received 31 July 1997
Abstract. Detailed morphometric knowledge of the microvascular network is needed for
studies relating structure to haemodynamic function in organs like the lung. Clinical volumetric
CT is limited to millimetre-order spatial resolution. Since evidence suggests that small arterioles
(50 to 300 micrometres) dominate pulmonary haemodynamics, we built a micro-CT scanner,
capable of imaging excised lungs in 3D with 100 µm resolution, for basic physiology research.
The scanner incorporates a micro-focal (3 µm) x-ray source, an xyzθ stage and a CCD-coupled
image intensifier detector. We imaged phantoms and contrast-enhanced rat lungs, reconstructing
the data with either the Feldkamp or the circle-and-line cone-beam reconstruction algorithm. We
present reconstructions using 180 views over 360 degrees for the circular trajectory, augmented
with views from a linear scan for the circle-and-line algorithm. Especially for platelike features
perpendicular to the rotation axis and remote from the midplane, the circle-and-line algorithm
produces superior reconstructions compared with Feldkamp’s algorithm. We conclude that the
use of nonplanar source trajectories to perform micro-CT on contrast-enhanced, excised lungs
can provide data useful for morphometric analysis of vascular trees, currently down to the
130 µm level.
1. Introduction
Since vascular disease constitutes the most serious health problem in western society, there
is widespread interest in methods to image the vascular tree. We are particularly interested
in pulmonary hypertension, a condition most often afflicting neonates (‘blue babies’) but
also affecting all age groups. Currently, there are no effective treatments for the disease,
in large part because the pathogenic mechanisms are so poorly understood (Harris and
Heath 1977). To address questions about the effect vascular network geometry has on the
haemodynamic function of the lung, we require detailed information about the morphometry
of the asymmetric, branching arterial tree. Quantification of important morphometrics of
this complex structure, including vessel segment order number, length, diameter, parent–
daughter diameter ratios and branching angles, has traditionally been accomplished using
0031-9155/98/040929+12$19.50 c 1998 IOP Publishing Ltd 929930 R H Johnson et al
tedious, destructive techniques like serial section histology (Finlay et al 1986) and corrosion
casting (Horsfield 1978, Yen et al 1984, Nettum et al 1995, Schraufnagel 1987). The recent
evolution of cone-beam reconstruction methods (Feldkamp et al 1984, Grangeat 1991, Clack
and Defrise 1994, Kudo and Saito 1994a), coupled with the use of microfocal angiography
systems for projection data acquisition (Clough et al 1997), should make it possible to
obtain the same information nondestructively and with less tedium and error.
Conventional angiographic studies provide planar views of the contrast-enhanced
vasculature, typically of the heart or brain. Recently, methods for 3D cardiac imaging have
been explored using either biplane angiograms (Wahle et al 1996) or a larger number of
views (Saint-Felix et al 1994). These methods, usually developed with clinical application
in mind, are not capable of providing adequate spatial resolution to visualize or measure
the small muscular arterioles implicated in a number of vascular pathologies including
hypertension. Dynamic 3D imaging with today’s technology must be performed with a very
small number of projections. Such limited data sets generally contain information adequate
for reconstruction of vessel medial axes or, at best, synthesis of a binary representation of
the vascular network. While many studies require dynamic information and can benefit from
these binary images, in some applications it is desirable to make accurate measurements of,
for example, vessel diameters, or to visualize intraluminal manifestations of disease such as
plaque. For some such studies, low-contrast, high-resolution imaging is the most suitable
of currently available methods, even though the temporal dimension must be sacrificed. We
report on static volumetric imaging of the pulmonary vascular tree. Our goal is to develop
high-resolution volumetric imaging methods for basic vascular research. In this work, we
compare reconstructions from the Feldkamp algorithm with those from our implementation
of the circle-and-line algorithm for cone-beam reconstruction of microvascular networks.
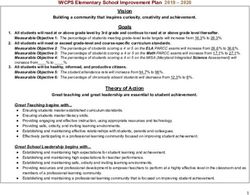
Figure 1. Schematic of the micro-CT scanner.
2. Methods
2.1. The x-ray microtomograph
We acquire transmitted x-ray projections from the dedicated microangiography system
shown in figure 1 consisting of a microfocal x-ray source, four-axis specimen3D micro-CT of vascular network 931
micromanipulator and an image intensifier detector coupled to a video CCD camera. The
source is of the demountable (turbo-pumped) type, and is operable over the 9–100 kVp
and 10 to several hundred microamp ranges (Guburick 1993). A magnetic electron lens
system focuses the electron beam with optical axis tangent to a cylindrical tungsten anode.
Focal spots as small as three by four micrometres can be attained, depending upon the tube
current. The beam, with central axis inclined 60 degrees relative to the electron optical
axis, emerges through a 500 µm beryllium window and is used without further filtration.
The computer-controlled specimen manipulator repeatability is one micrometre in
translation and 0.001◦ in rotation. The 9, 7, 5 in image intensifier provides 6 lp mm−1
resolution in the 7 in mode used for this study. The 25 mm output window is dual-optically
coupled to a room-temperature CCD camera which outputs a standard RS-170 (640 by 480
pixels; 8 bits/pixel) video signal. Image data may be acquired to SVHS tape for dynamic
studies, but we utilize direct frame-averaging digitization to collect projection data for cone-
beam reconstruction.
Figure 2. Source trajectories for the circular (left) and circle-and-line (right) orbits.
2.2. Cone-beam reconstruction
Because of its modest computational requirements and relative ease of implementation,
Feldkamp’s algorithm (FDK) has been the most widely implemented method for 3D
conebeam reconstruction from transmitted x-ray projections (Feldkamp et al 1984). Planar
projections P8 (Y, Z) of an object f (r) are obtained at a number of angles 8 using the
single circular source trajectory shown in the left panel of figure 2. The detector plane,
with coordinates Y, Z, is scaled and shifted to coincide with the rotation axis as shown
in figure 3. In our notation the subscript C0 is associated with the FDK algorithm. The
reconstruction fC0 (r) is obtained by first convolving the weighted projection data in the Y
(horizontal) direction with the Shepp–Logan or other filter kernel, h, of choice (Shepp and
Logan 1974):
Z
d
pC0 (Y, Z) = dY 0 √ P8 (Y 0 , Z)h(Y − Y 0 )
d 2 + Y 02 + Z 2
then backprojecting the filtered data from every angle:
I
1 d2
fC0 (r) = d8 pC (Y0 , Z0 )Y0 =dr·ŷ0 /(d+r·x̂ 0 ), Z0 =dz/(d+r·x̂) .
4π 2 (d + r · x̂0 )2 0
Although qualitatively informative and useful for many purposes, images reconstructed
with the FDK algorithm suffer from well known artefacts arising from the approximate932 R H Johnson et al
Figure 3. Geometry and parameters for reconstruction algorithm.
nature of the algorithm. These problems (inability to fully recover object densities and
spatial distortions remote from the midplane, which Feldkamp called vertical smearing)
become more severe the larger the cone angle. The failure of the circular orbit, to which
Feldkamp’s method is applicable, to satisfy the completeness condition is the source of the
artefacts in the reconstruction. The original completeness, or data-sufficiency, condition
states that every plane intersecting the object to be reconstructed must intersect the source
orbit (Tuy 1983). Except for points in the plane containing the source trajectory (the
‘midplane’), this condition is clearly not satisfied for the circular orbit. In the FDK
algorithm, object points off the midplane are considered to lie in the midplane of another,
hypothetical orbit, and a first-order geometric correction is made to account for the difference
between the actual and hypothetical orbits. The density of each voxel in the reconstruction
is calculated by summing up the incremental contributions to these quasi-midplanes from
data acquired over a full 360◦ source rotation.
The circle-and-line conebeam reconstruction algorithm (Zeng and Gullberg 1992) largely
overcomes the deficiencies of FDK reconstruction. The right panel in figure 2 shows the
source trajectory for the circle-and-line orbit. Figure 4 depicts a cross-section through
Radon space and shows the object support and the data available from a single circular scan
(Grangeat 1991). The small heavy circle at the centre indicates the boundary of the object
support and the two large shaded circles contain the data available from a single circular
orbit. Line integrals are available for the shaded regions of the object, but the cross-hatched
regions represent the ‘shadow zone’, for which the circular orbit provides no data.
In circle-and-line scanning, the shadow zone data are supplied by a linear scan. After
rotating the object through 360 degrees, the line integrals missing from the circular
orbit geometry are acquired by translating the specimen parallel to the rotation axis,
supplementing the circular orbit with a finite, orthogonal line, and satisfying the data
sufficiency condition (Kudo and Saito 1994b). In our circle-and-line implementation (Hu
1995, 1996, see figure 3) the source S is located a distance d from the vertical axis of3D micro-CT of vascular network 933
Figure 4. Cross-section through Radon space showing the object support and the data available
from a circular orbit. The small heavy circle at the centre indicates the boundary of the object
support and the two large shaded circles contain the available data. The cross-hatched regions
represent the ‘shadow zone’, for which the circular orbit provides no data.
rotation. The reconstructed object function f (r) consists of three parts:
f (r) = fC0 (r) + fC1 (r) + fL (r).
The first term is equivalent to the FDK reconstruction given above. The second term is
computed, also from the circular-orbit data, using an analogous convolution-backprojection
procedure:
Z
∂ d
pC1 (Z) = dY √ P8 (Y, Z)
∂Z d + Y 2 + Z2
2
I
1 z
fC1 (r) = − 2 d8 pC (Z0 )Z0 =dz/(d+r·x̂0 ) .
4π (d + r · x̂0 )2 1
The third component of the reconstruction, fL (r), is obtained from the linear-scan data as:
Z Z π
1
fL (r) = − 2 dz 0 d2Hz0 (l, 2)l=[dr·ŷ0 /(d+r·x̂0 )] sin 2+[d(z−z0 )/(d+r·x̂0 )] cos 2
4π (d + r · x̂0 ) 0
where
2
d + l 2 ∂ 2 6z0 (l, 2) 2l ∂6z0 (l, 2)
Hz0 (l, 2) = | cos 2|wz0 (l, 2) +
d2 ∂ 2l d2 ∂l
ZZ
d
6z0 (l, 2) = dY dZ √ Pz0 (Y, Z)δ(Y sin 2 + Z cos 2 − l)
d 2 + Y 2 + Z2
and
(
1 when 2lz0 cos 2 + z02 cos2 2 − d 2 sin2 2 > 0
wz0 (l, 2) =
0 otherwise.
2.3. Data acquisition and processing
In order to exactly establish the system geometry and to demonstrate the quality of the
circle-and-line relative to FDK reconstruction, we first reconstructed the cube phantom
shown in figure 5. The phantom is a 5 × 5 × 5 cm3 cube with 3.2 mm Plexiglass faces934 R H Johnson et al
Figure 5. The 5 cm cube phantom.
and four, 6 mm diameter Plexiglass rods which serve as vertical pillars to support assorted
objects within the cube. Inside the cube are a number of metallic plates and two 9.5 mm
wire mesh cubes. Each of the six faces of the wire mesh cubes is a different grade of
steel mesh: mesh No 40, 60, 80, 100, 150 and 200. The original idea was to estimate
the high-contrast spatial resolution of the system by observing the modulation produced by
the various meshes. Also inside the cube were seven parallel thin metal plates, 6.3 mm
apart and oriented perpendicular to the rotation axis. From top to bottom, they were
0.390 mm aluminum, 0.216 mm steel, 0.127 mm brass, 0.216 mm steel (in midplane),
0.394 mm aluminum, 0.813 mm perforated aluminum and 0.813 mm perforated aluminum.
The perforated aluminum contained 0.813 mm holes on 1.4 mm centres. Several other plates
of the same materials were affixed inside the phantom at various angles, both orthogonal
and oblique, with respect to the seven parallel plates.
We acquired projection data of the cube phantom using the parameters in table 1.
Projection preprocessing consisted of the following steps: (1) 2D unwarping to correct the
image intensifier distortion; (2) cropping to centre the vertical projection of the rotation
axis onto the detector; (3) flood-field division to correct for the non-uniform illumination
intensity and (4) normalization of the intensity between projections to correct for temporal
drift.
An image of a ‘bb phantom’ (a precise grid of steel ball bearings press-fitted into a
Plexiglass plate attached to the input) was used to correct the image intensifier distortion.
The distortion correction algorithm consisted of two steps. First the y 0 z0 coordinates of
the bb’s centres of mass were detected in the distorted image of the phantom. These
coordinates were used to calculate a set of coefficients for two polynomial equations which
mapped y 0 z0 pairs into yz pairs globally, over the entire image, where yz were the known,
true coordinates of the grid vertices. Second, these stored coefficients were applied to
correct the image intensifier distortion in all the projections. Since the image intensifier3D micro-CT of vascular network 935
Table 1. Parameters for data acquisition.
Cube phantom Rat lung
kVp 90 56
Tube current (µA) 15 46
Number of projections (circular scan; 360◦ ) 180 180
Length of linear scan (mm) 80 52
Number of projections (linear scan) 41 27
Frames averaged per projection 10 10
Data collection time (min) 45 40
Source-to-centre distance (cm) 36 19.7
Source-to-detector distance (cm) 71.12 67.9
Detector dimensions used for reconstruction (cm) 15.13 × 15.13 14.87 × 14.87
Detector matrix size used for reconstruction (pixels) 467 × 467 457 × 457
Cone angle (degrees) 6.10 6.25
was fixed in space, the unwarping coefficients were not dependent on projection angle as
they are in simulator-CT and other situations in which the detector rotates around the object
(Cho et al 1995, Fahrig et al 1997).
The y coordinate of the rotation axis was located by forming a sinogram using lines
of the projections which contained the Plexiglass cylinder supporting the phantom cube.
The midpoint between the left- and right-most excursions of the tube’s projection in the
sinogram was taken as the y coordinate of the rotation axis projection. The z coordinate of
the central fan of rays was located by translating an annular object vertically through the
beam until the elliptical projection of the ring narrowed to a horizontal line coincident with
the central fan.
After each data acquisition session, besides imaging the bb phantom, a flood field was
acquired with the x rays on but no object in the beam. Fifty frames were averaged in order
to produce a smooth image of the domed illumination intensity. The distortion-corrected,
cropped projections were then divided by the flood field. Finally, four regions of interest
(ROIs) scattered around the image field were located which were never obscured by the
object in any projection. The ratio of the integrated intensity in these ROIs to that of
the same ROIs in the flood field was used to compute a scaling factor for each image to
correct for possible temporal drift in the overall illumination intensity or in the ADC gain.
This scaling step was probably not required, since the intensity variations have been less
than 0.1% for all data sets collected to date. FDK and circle-and-line reconstruction were
performed on the cube phantom data using the parameters shown in table 2.
Table 2. Parameters for image reconstruction.
Cube phantom Rat lung
Filter Shepp–Logan Shepp–Logan
Reconstruction matrix (voxels) 352 × 352 × 256 (x, y, z) 457 × 457 × 457
Reconstructed volume (cm) 7.7 × 7.7 × 5.6 3.5 × 3.5 × 3.5
To begin to address questions about the morphology of the pulmonary microvasculature,
we have reconstructed images of excised, contrast-enhanced, ferret, mouse and rat lungs.
Briefly, in the case of a 394 g male Sprague–Dawley rat used here for illustration,936 R H Johnson et al
Figure 6. Set-up for imaging the rat lung. The source is in the rear to the right, the white rat
lung suspended in the cylinder in the centre, and the image intensifier in the foreground to the
left. The airway and contrast agent tubing can be seen above the lung.
40 mg kg−1 sodium pentobarbital was administered prior to exposing and cannulating the
carotid artery. After administering 300 units of heparin through the inserted tube, the rat
was exsanguinated, the trachea intubated, the pulmonary artery cannulated and the heart
removed. The lung vessels were flushed with a physiological saline solution containing 5%
bovine serum albumin while ventilating the lung. Flushing was continued during several
cycles of hyperventilation until the lung was clear of blood (white). The lung was then
suspended by the tracheal and pulmonary arterial cannulae from the top of a thin-walled
polyacetate cylinder as shown in figure 6, and a proprietary, brominated perfluorocarbon
contrast agent introduced through the pulmonary arterial cannula to a pressure of 10 cm of
the contrast medium (specific gravity 1.9). The airway was held at a constant pressure of
11 cm H2 O throughout the imaging procedure. We acquired projection data of the rat lung
using the parameters given in table 1. After preprocessing as described above for the cube
phantom, images of the lung were reconstructed using the parameters in table 2.
3. Results
Figure 7 shows a yz (coronal, vertical) plane through the cube phantom, intercepting the
seven parallel plates and a wire mesh cube. The FDK result is on the left and the circle-
and-line reconstruction of the same plane on the right. None of the wire meshes were
resolved largely because the mesh cubes were assembled using solder which was so dense
that hollow projections resulted, even at this high kVp. The severe artefacts caused by the
solder dramatically reduced the quality of the reconstructed image in its vicinity. Though
the overall quality of the two reconstructions is similar, the ability of the circle-and-line
algorithm to more accurately recover densities and reduce distortions of thin, platelike
objects remote from the midplane is clearly evident: examination of the roof and floor of3D micro-CT of vascular network 937
Figure 7. Coronal plane through the cube phantom, intercepting the seven parallel plates and a
wire mesh cube. FDK on the left, circle-and-line on the right. The top and botom of the cube
and the peripheral plates are more accurately reconstructed with the circle-and-line algorithm.
Figure 8. Fully preprocessed zero and sixty degree projections of the rat lung. Scale
bar = 2 mm, diameter of inlet artery = 1.6 mm.
the box, and the thin metal plates away from the midplane in figure 7, shows that they
are more faithfully recovered by the circle-and-line reconstruction algorithm. The quality
of transaxial images reconstructed using FDK was visually indistinguishable from those
reconstructed using the circle-and-line algorithm.
Figure 8 shows fully preprocessed zero and sixty degree projections of the rat lung.
The intricacy and small size of the vascular structures are brought home by considering
the 4 cm size of these images referred to object space. Figure 9 shows twelve sagittal
planes, about 300 µm apart, near the centre of the rat lung. The smallest vessels seen
toward the bottom of the tree are approximately 100 µm in diameter. Figure 10 shows
surface-shaded renderings of the rat lung data segmented using three different thresholds.
With the lowest threshold, shown on the left, the smaller vessels are segmented into the
vascular compartment, at the cost of also including some background noise and obscuring
the main trunk of the tree. With an intermediate threshold, the vessel tree is pruned a bit938 R H Johnson et al
Figure 9. Twelve sagittal planes through the rat lung spaced about 300 µm apart.
Figure 10. Surface shaded rendering of the rat lung reconstruction using low (left), intermediate
(centre) and high thresholds for segmentation.
and the smallest vessels are lost. With the highest threshold shown on the right, the tree is
cut back further, exposing the trunk, but obliterating most of the smaller arterioles.
4. Discussion
Our results indicate that useful 3D images of the pulmonary vasculature can be obtained
using our microangiography imaging system and conebeam reconstruction methods. The
circle-and-line algorithm should produce superior and quantitatively more accurate results
than the FDK algorithm at high magnification when the cone angle is large. For the small
cone angles (∼ 6◦ ) used in this work, the slightly improved image quality produced by the
circle-and-line algorithm, though evident for the platelike features in the cube phantom, was
not subjectively observable in the lung images, where there is no preconceived mental notion
of how the tree ought to look. In general, the degree of inaccuracy of FDK reconstruction3D micro-CT of vascular network 939
is highly object dependent. As first pointed out by Feldkamp, the largest errors are to be
expected for flat objects parallel to and remote from the midplane. Feldkamp’s method is
adequate for many purposes if the (half) cone angle is kept less than ten degrees. Since the
circle-and-line algorithm is approximately twice as computationally intensive as FDK and
data collection is somewhat more complicated, there are probably situations appropriate for
both methods.
Image quality produced by our current system is limited by the CCD camera. The
spatial resolution is limited by the matrix dimension of the acquired projections, since in
general the usable portion of the imaged field is about 4602 pixels (230 lp), while the spatial
resolution of the image intensifier (II) is 7.2 lp mm−1 in the 5 in mode. Thus, the attainable
spatial resolution can be calculated by dividing 230 lp by the object diameter. For a 30 mm
object like the rat lung the resolution attainable in the projection data is about 130 µm, no
matter which image intensifier mode is used. For smaller objects imaged using the 5 in
II mode, the resolution limit imposed by the II is 7.2 lp mm−1 multiplied by the point
projection magnification. For example, the II would limit projections of a 10 mm object
to a spatial resolution of 91 lp mm−1 or 11 µm, but the limit imposed by the camera is
23 lp mm−1 or about 43 µm.
For imaging high-contrast objects like the cube phantom and contrast-enhanced lungs,
the 256:1 dynamic range of the camera is not the serious limitation it would be for low-
contrast objects. Theoretically, the current system should be capable of about 4% contrast
resolution. In fact we suspect it is worse than 10%, since the true bit depth of the data is
more likely six or seven than eight. If anything, the contrast agent used to produce the lung
images shown here was too dense. Although some soft-tissue detail like the large-airway
structures can be made out in figure 9, artefacts caused by the combination of very high-
frequency vessel edges and limited angular sampling caused most of the finer soft-tissue
detail to be obscured. Preliminary data from a mouse lung imaged with a far less attenuating
contrast medium indicates that considerably more physiologically relevant soft-tissue detail
should be available, even with the current detector system.
An important consideration for quantitative morphometric studies of the microvascula-
ture is the method used to segment the vessels from the image volume. Susceptibility of the
rendered volume of figure 10 to errors caused by selection of the binary threshold indicates
that simple thresholding is not an adequate method for image segmentation: if the smallest
vessels are to be successfully segmented, the diameters of the large vessels will be exagger-
ated, while a threshold suitable for accurate estimation of large vessel diameters would prune
the smallest vessels from the tree. The shape-based methods of grey-level mathematical
morphology (Haralick et al 1987) would seem to lend themselves as an image processing
method for volumetric vascular image segmentation.
Our near-term plan is to augment the angiography system with a non-intensified, cooled-
CCD based, 1 k2 - or 2 k2 -pixel, 16-bit digital detector optimized for static CT; to explore and
explain the relationship between our circle-and-line implementation and others which also
obtain the shadow-zone data from a linear scan (Kudo and Saito 1994b) and to investigate
the application of mathematical morphology and other more sophisticated image processing
techniques to volumetric segmentation.
The results presented here are promising enough that follow-up studies assessing
accuracy on phantoms appropriate to the vascular geometry are warranted. At present
available information on pulmonary vascular morphometry comes from plastic casts of one
or two lungs from four species, with none from lungs remodelled by pulmonary vascular
disease. The expectation is that this imaging approach will make it practical to carry out
quantitative morphometric studies to resolve questions relating to vascular disease.940 R H Johnson et al
Acknowledgments
We thank Klaus Mueller for help with the distortion correction algorithm and Christopher
Hanger, MD and David Roerig, PhD for technical assistance with the microangiography
apparatus. Supported in part by National Heart, Lung and Blood Institute grants HL-19298
and HL-24349, the Department of Veterans Affairs and the W M Keck Foundation.
References
Cho P S, Johnson R H and Griffin T W 1995 Cone-beam CT for radiotherapy applications Phys. Med. Biol. 40
1863–83
Clack R and Defrise M 1994 Cone-beam reconstruction by the use of Radon transform intermediate functions
J. Opt. Soc. Am. 11 580–5
Clough A V, Linehan J H and Dawson C A 1997 Regional perfusion parameters from pulmonary microfocal
angiograms Am. J. Physiol. 272 (Heart Circ. Physiol. 41) H1537–48
Fahrig R, Moreau M and Holdsworth D W 1997 Three-dimensional computed tomographic reconstruction using
a C-arm mounted XRII: correction of image intensifier distortion Med. Phys. 24 1097–106
Feldkamp L A, Davis L C and Kress J W 1984 Practical cone-beam algorithm J. Opt. Soc. Am. 1 612–9
Finlay M, Barer G R and Suggett A J 1986 Quantitative changes in the rat pulmonary vasculature in chronic
hypoxia—relation to haemodynamic changes Q. J. Exp. Physiol. 71 151–63
Grangeat P 1991 Mathematical framework of cone beam 3D reconstruction via the first derivative of the Radon
transform Mathematical Methods in Tomography ed G T Herman, A K Louis and F Natterer (Berlin: Springer)
pp 66–97
Guburick P 1993 Fundamentals of microfocus radiography FeinFocus Roentgen-Systeme Technical Report
Haralick R M, Sternberg S R and Zhuang X 1987 Image analysis using mathematical morphology IEEE Trans.
Pattern Anal. Machine Intell. 9 532–50
Harris P and Heath D 1977 The Pulmonary Circulation (Edinburgh: Churchill Livingstone)
Horsfield K 1978 Morphometry of the small pulmonary arteries in man Circ. Res. 42 593–7
Hu H 1995 A new cone beam reconstruction algorithm for the circle-and-line orbit Proc. 1995 Int. Meeting on
Fully 3D Image Reconstruction in Radiology and Nuclear Medicine (Aix-les-Bains, France, July 4–6, 1995)
ed P Grangeat (Grenoble: LETI) pp 303–10
——1996 An improved cone-beam reconstruction algorithm for the circular orbit Scanning 18 572–81
Kudo H and Saito T 1994a Derivation and implementation of a cone-beam reconstruction algorithm for nonplanar
orbits IEEE Trans. Med. Imaging 13 196–211
——1994b An extended completeness condition for exact cone-beam reconstruction and its application IEEE
Nuclear Science Symp. Medical Imaging Conf. (Norfolk, VA, 1994) (New York: IEEE) pp 1710–14
Nettum J A 1995 Combined vascular-bronchoalveolar casting using formalin-fixed canine lungs and a low viscosity
silicone rubber Anat. Rec. 243 479–82
Saint-Felix D, Tousset Y, Picard C, Ponchut C, Romeas R and Rougee A 1994 In vivo evaluation of a new system
for 3D computerized angiography Phys. Med. Biol. 39 583–95
Schraufnagel D E 1987 Microvascular corrosion casting of the lung. A state-of-the-art review Scanning Microsc.
1 1733–47
Shepp L A and Logan B F 1974 The Fourier reconstruction of a head section IEEE Trans. Nucl. Sci. 21 21–43
Tuy H K 1983 An inversion formula for cone-beam reconstruction SIAM J. Appl. Math. 43 546–52
Wahle A, Oswald H and Fleck E 1996 3D heart-vessel reconstruction from biplane angiograms IEEE Comput.
Graph. Appl. 16 65–73
Yen R T, Zhuang F Y, Fung Y C, Ho H H, Tremer H and Sobin S S 1984 Morphometry of cat’s pulmonary
arterial tree J. Biomech. Eng. 106 131–6
Zeng G L and Gullberg G T 1992 A cone-beam tomography algorithm for orthogonal circle-and-line orbit Phys.
Med. Biol. 37 563–77You can also read