Go-CHART: A miniature remotely accessible self-driving car robot - NSF-PAR
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
October 25-29, 2020, Las Vegas, NV, USA (Virtual)
Go-CHART: A miniature remotely accessible self-driving car robot
Shenbagaraj Kannapiran and Spring Berman
2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) | 978-1-7281-6212-6/20/$31.00 ©2020 IEEE | DOI: 10.1109/IROS45743.2020.9341770
Abstract— The Go-CHART is a four-wheel, skid-steer robot
that resembles a 1:28 scale standard commercial sedan. It is
equipped with an onboard sensor suite and both onboard and
external computers that replicate many of the sensing and
computation capabilities of a full-size autonomous vehicle. The
Go-CHART can autonomously navigate a small-scale traffic
testbed, responding to its sensor input with programmed con-
trollers. Alternatively, it can be remotely driven by a user who
views the testbed through the robot’s four camera feeds, which
facilitates safe, controlled experiments on driver interactions
with driverless vehicles. We demonstrate the Go-CHART’s
ability to perform lane tracking and detection of traffic signs,
traffic signals, and other Go-CHARTs in real-time, utilizing
an external GPU that runs computationally intensive computer
vision and deep learning algorithms.
I. I NTRODUCTION
In this paper, we propose a miniature mobile robot that can
emulate sensing and computation capabilities of a full-size Fig. 1. Small-scale driving testbed and a Go-CHART robot (inset).
autonomous vehicle, with the aid of an external GPU for
computationally intensive tasks. The Go-CHART can also
be driven remotely by a user with first-person views of the modular and can be upgraded with updated microcontrollers
robot’s environment through video feeds from its cameras. and microprocessors, as well as stereo cameras. It utilizes a
The Go-CHART can be used to conduct studies on conditions system architecture that supports an external GPU capable
and challenges that are likely to be experienced by real of handling computationally intensive deep learning and
autonomous vehicles, but are too difficult to realistically machine learning algorithms. In autonomous mode, the Go-
replicate in a driving simulator (e.g., crash scenarios with CHART is controlled by on-board Raspberry Pi computers
complex vehicle dynamics and impacts on surroundings, and Teensy microcontrollers, and external computers that
dynamic lighting and weather conditions) and too risky to replicate many of the sensing and computation capabilities of
physically implement at full scale. The Go-CHART can be a full-size AV; for example, lane tracking and object detec-
used to investigate interactions between human drivers and tion using deep learning algorithms. We have also developed
driverless vehicles; perform studies on cooperative driving a graphical user interface that enables a user to remotely
strategies; and test computer vision, deep learning, and drive the Go-CHART using a steering wheel and responsive
control algorithms for autonomous vehicles. It can also be pedals. Additionally, we have developed a small-scale testbed
used to collect a wide range of data sets in scenarios that are that resembles a U.S. driving environment, including roads,
difficult to reproduce on full-size vehicles for training deep traffic lights, signs, and other miniature scenery such as trees,
learning algorithms. which not only increase the realism of the testbed for human-
Deep learning and computer vision play a crucial role robot interaction experiments, but also provide feature points
in controlling autonomous vehicles and are essential for in the environment for performing experiments on monoc-
the vehicle to exhibit higher levels of autonomy. However, ular simultaneous localization and mapping (SLAM). In
existing miniature driving testbeds lack the capabilities to this paper, we experimentally demonstrate the lane-tracking,
support an external GPU. In this work, our contributions object detection, and decision-making capabilities of the Go-
include the design and development of the Go-CHART, a CHART on this testbed.
small four-wheel skid-steer robot that resembles a standard II. E XISTING P LATFORMS
commercial sedan. It is equipped with an ultra-wide night
The recently accelerated development of self-driving cars
vision front camera, side-view and rear-view cameras, an ul-
has motivated the need to validate controllers for these vehi-
trasonic sensor, and a 2D LiDAR sensor. The Go-CHART is
cles on experimental testbeds. Several full-scale testbeds with
This work was supported by the ASU Global Security Initiative. 5G-enabled infrastructure have been implemented for testing
Shenbagaraj Kannapiran and Spring Berman are with the School connected and autonomous vehicles, including University
for Engineering of Matter, Transport and Energy, Arizona State
University (ASU), Tempe, AZ 85281, USA {shenbagaraj, of Michigan’s Mcity [18], South Korea’s K-City [19], and
spring.berman}@asu.edu UK’s Millbrook Proving Ground [20]. In addition, Google
978-1-7281-6212-6/20/$31.00 ©2020 IEEE 2265
Authorized licensed use limited to: ASU Library. Downloaded on May 18,2021 at 05:13:24 UTC from IEEE Xplore. Restrictions apply.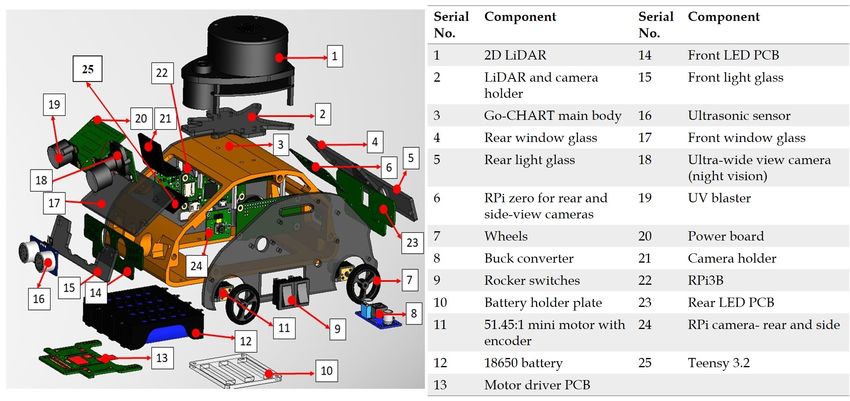
TABLE I
has created a miniature Google Street View in tiny realistic
I NTERNAL C OMPONENTS OF G O -CHART ROBOT
reproductions of various international sites and cities [17].
The paper [1] includes a list of robots costing less than Components Number Total Cost
US $300 that were developed within the last 10 years from of Units (US$)
Raspberry Pi 3B 1 32
the date of its publication. The work proposed a small Raspberry Pi Zero 3 15
educational robot that can drive autonomously through a RPLIDAR A1 2D LiDAR 1 99
traffic testbed. However, the robot lacks the sensors and Raspberry Pi camera 3 15
Raspberry Pi ultra-wide angle 1 11
processing capabilities that facilitate the implementation of night vision camera
decentralized robot controllers and computation-intensive Teensy 3.2 1 20
deep learning algorithms. TB6612 Adafruit motor driver 2 10
Polulu mini motors with encoders 4 36
The University of Delaware Scaled Smart City [8] is a SD cards (16GB) 4 16
small-scale testbed that has been used to replicate real-life Miscellaneous components - 10
traffic scenarios and optimize control strategies on mobile
systems. The testbed uses a Vicon motion capture system TABLE II
to localize and coordinate 35 vehicles simultaneously in a E XTERNAL C OMPONENTS OF G O -CHART ROBOT
centralized manner.
Components Number Total Cost
The paper [3] proposes a traffic testbed with a fleet of of Units (US$)
miniature vehicles with Ackermann steering. The testbed External GPU (1 per robot) 1 500
supports cooperative driving studies and multi-vehicle navi- LAN cables (2 ft) (1 per robot) 1 3
gation and trajectory planning. This paper includes a list of Miscellaneous components (per - 10
robot)
miniature robots that also use Ackermann steering. However, Dual-band router (1 per ∼60 1 200
the robotic platform used in [3] does not incorporate vision robots)
or range sensors and lacks the processing capacity to run
computationally intensive algorithms.
Several open-source and commercially available miniature the external hardware components of the Go-CHART, which
autonomous vehicle robots with onboard GPUs and vision- cost approximately US $513 in total (excluding the network
based control have been developed in recent years. The router, which can be used with multiple robots).
MIT Racecar [5], MuSHR [21], and Donkey Car [23] are The body of the Go-CHART is a 1:28 model of a
open-source self-driving race car platforms with a range of standard commercial sedan and features a modular design,
onboard processors and sensors. The AWS DeepRacer [22] allowing for easy replacement and addition of components
and NVIDIA Jetbot [24] are commercially available robots as necessary. The main body, labeled 3 in Fig. 2, is a single
with Ackermann and differential-drive steering, respectively. 3D-printed piece, while the remaining parts of the frame are
However, all of these platforms lack 360◦ camera views, and made from laser cut acrylic.
their restricted onboard processing capabilities preclude the Custom printed circuit boards (PCBs) were designed in
implementation of complex deep learning techniques. order to densely populate all the circuitry within the limited
In [9], it was demonstrated that small differential-drive volume of the Go-CHART. The PCBs provide several voltage
robots [2] can exhibit certain autonomous functions on levels (3.3V, 5V, and 12V) that can accommodate a wide
a driving testbed such as lane tracking and traffic light variety of sensors, microcontrollers, and microprocessors.
detection. However, the limited onboard processing power The PCBs have open ports for additional sensors, motor
of the robot caused delays in image processing, resulting in drivers, and microcontrollers as needed. Four custom PCBs
errors in navigation. Other differential-drive robots such as were fabricated: (1) a power supply board, which includes
[6], [7] can also emulate particular functions of autonomous the voltage regulators and the microcontroller board; (2) a
vehicles, but lack the processing power necessary for real- motor driver board, which includes the motor drivers and
time navigation and object detection. all sensors; and (3) front and (4) back LED boards, which
III. G O -CHART D ESIGN AND C APABILITIES control the headlights, tail lights, and turn indicator lights.
A. Mechanical design and circuit boards
B. Drive mechanism
Figures 2 and 3 show SolidWorks renderings of the Go-
CHART, with its components labeled in the exploded view The Go-CHART uses a four-wheel skid steering system,
in Fig. 2. The Go-CHART is built from both off-the-shelf which is powered by four standard micro metal gear motors
and custom-built components such as custom PCBs, 3D with a 51.45:1 gear ratio. The motors drive 32-mm-diameter
printed parts, and laser cut acrylic parts. As described in wheels and have Hall effect encoders with a linear resolution
Section III-D, we use the GPU on the NVIDIA Jetson of 0.163 mm/tick, enabling the Go-CHART to move at
TX2 module, which costs around US $500. However, the speeds between 4 cm/s and 42 cm/s. Two Adafruit TB6612
choice of GPU is flexible, depending on the application. motor drivers control each motor separately, using a PD
Table I lists the primary internal components of the robot controller to limit the overshoot and dampen the oscillations
and their costs, which total to about US $264. Table II lists in the robot’s heading angle.
2266
Authorized licensed use limited to: ASU Library. Downloaded on May 18,2021 at 05:13:24 UTC from IEEE Xplore. Restrictions apply.
Fig. 2. Exploded SolidWorks rendering of Go-CHART, with components labeled.
Robot Operating System (ROS) and the OpenCV library [16]
installed. The RPi Zero boards run the Raspbian OS and
are upgraded with external dual band USB wireless network
adapters, soldered directly to the motherboard, to enhance
video streaming performance. Low-level control of actuation
and sensor data processing are performed by a Teensy 3.2
microcontroller (MK20DX256VLH7 processor with ARM
Cortex-M4 core running at 96 MHz with 64kB RAM), which
can accommodate a large number of PWM and digital pins.
In addition to these onboard components, an external GPU
is used to train and implement the neural network models for
the deep learning algorithms described in Section V. The
Fig. 3. SolidWorks renderings of isometric view, top view, and front view external GPU’s capacity can be varied as needed, based on
of Go-CHART. the testing requirements. We used a GeForce RTX 2080 Ti
GPU to train the neural network models. To keep the system
low-cost and portable, we used a low-power NVIDIA Jetson
C. Power supply
TX2 module with 256-core PascalTM GPU architecture to
The Go-CHART has a custom-built battery pack with execute the deep learning algorithms using the trained model.
four 18650 batteries that deliver 7.4V at 7000 mAh, which
provides enough power to drive the robot for almost an hour. E. Communication capabilities
The battery pack circuit is composed of four batteries, a 2S
battery management system (BMS), the battery protection Experiments on cooperative driving and multi-robot con-
circuit, voltage regulators, a buck converter, fuses, and 3.5 trol will often require ad hoc communication between pairs
mm barrel connectors. of Go-CHARTs. To implement this communication, the
RPi3B onboard the Go-CHART can act as a Wifi router node,
D. Computational capabilities enabling limited-bandwidth, two-way information transfer
The Go-CHART is equipped with commercially available with a nearby robot. Since this is a short-range weak signal
microprocessors and microcontrollers that are supported by with limited bandwidth, usage of the external GPU is not
extensive online resources. High-level control and front-view possible (higher bandwidth is required for video streaming
camera video streaming are performed by one Raspberry Pi with minimal latency), which prevents the implementation
3 Model B (RPi3B) computer (1.2 GHz quad-core ARM of deep learning algorithms that require the GPU. The Go-
Cortex-A53 with 1GB LPDDR2) onboard the robot and CHART can also operate independently, without communi-
three RPi Zero W computers (1 GHz single-core CPU, 512 cating with other Go-CHARTs. In this case, the robot must
MB RAM) dedicated for video streaming from the side and have access to the external GPU in order to run controllers
rear-view cameras. The RPi3B runs Ubuntu MATE with the that utilize deep learning algorithms.
2267
Authorized licensed use limited to: ASU Library. Downloaded on May 18,2021 at 05:13:24 UTC from IEEE Xplore. Restrictions apply.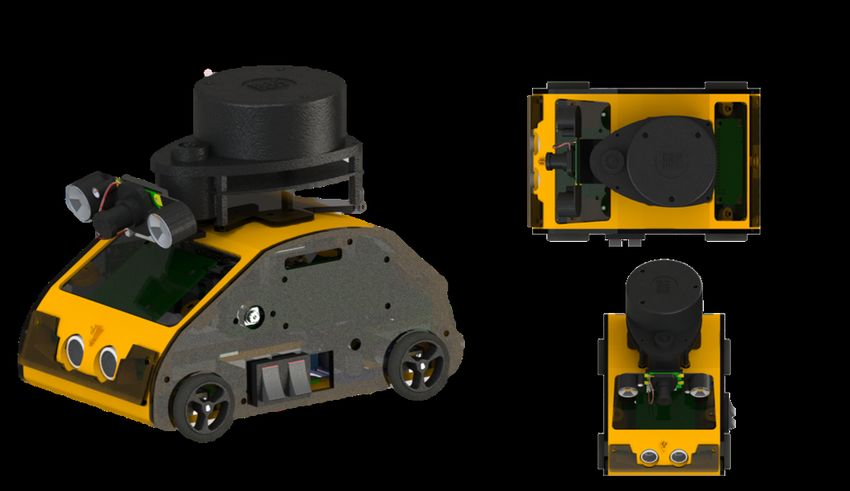
In addition, multiple Go-CHARTs can be connected to a socket communication protocol to the RPi3B onboard the
common dual band router (multiple routers in the case of Go-CHART, which controls the Teensy board to steer the
a large testbed environment), which are in turn connected robot in real-time (see next section). A demonstration of
to the same LAN network and operate at different channels driving the Go-CHART in Remote-Control mode is shown in
between 2.4 GHz and 5 GHz so as to reduce interference the supplementary video, which can also be viewed at [24].
between the routers and increase bandwidth to accommodate
multiple video streams from the Go-CHARTs. The external B. Control architecture
Jetson TX2 GPU (one for each Go-CHART) is manually The control architecture of the Go-CHART is illustrated
connected to the routers through the LAN to reduce wireless in Fig. 5. The RPi3B and Teensy boards transfer informa-
network traffic, and the video stream is processed on the tion wirelessly using a two-way USB serial communication
external GPU. protocol. The Teensy board controls the two motor drivers,
each of which drives two motors. All sensors are connected
F. Onboard sensors to the Teensy board, which transmits the sensor data in real-
The Go-CHART integrates a variety of vision and range time to the RPi3B. The steering angle values obtained by the
sensors, shown in Fig. 4, to enable lane tracking, object external computer, either from the lane-tracking algorithm in
detection, collision avoidance, and mapping. There are four Autonomous mode or the steering wheel inputs in Remote-
RPi cameras (Sony IMX219 8-megapixel sensor) on the Control mode, are sent wirelessly to the RPi3B, which
robot: one ultra-wide angle front-view camera with night transmits the commands to the Teensy board to drive the
vision, one camera on each side of the robot, and one rear- motors. The RPi3B wirelessly transmits sensor data in real-
view camera. The front-view camera, which has a viewing time, including the camera feeds, to the external GPU for
angle of 160◦ , is mounted 9 cm above the bottom of the processing. The GPU runs the deep learning algorithms
Go-CHART main body and is tilted downward by an angle in Section V for lane tracking and object detection. The
of 30◦ . This placement was chosen so that the camera’s field GPU then reports the commanded Go-CHART heading and
of view contains the entirety of a 30-cm-tall traffic light identified objects of interest in the environment to the RPi3B
when the robot is at least 20 cm from the light, so that for further processing. This is done by employing ROS
the robot can still detect the light when it drives forward running on the RPi3B with ROS publishers and subscribers.
about one-third of the way into an intersection on the testbed.
An HC-SR04 ultrasonic distance sensor with a range of V. NAVIGATION AND O BJECT I DENTIFICATION
2–400 cm and a resolution of 0.3 cm is mounted on the This section describes the algorithms used by the Go-
front of the robot, and a 2D 360◦ LiDAR (RPLIDAR A1) CHART for lane tracking and object detection. The outer
is mounted on top. The measurements from the ultrasonic control loop of the robot performs line and obstacle detection
sensor and LiDAR are used to detect nearby obstacles and using techniques from the OpenCV library. The 2D LiDAR
initiate collision avoidance maneuvers, and the LiDAR also and ultrasonic sensors detect obstacles, and if an obstacle is
enables 2D mapping of the local environment. In addition, detected, the Go-CHART stops immediately and yields until
the Go-CHART includes an LDR (Light Dependent Resistor) the obstacle moves away. The robot also detects lines on
sensor for brightness correction of the front-view camera the ground in front of it by defining a region of interest in
images, an IMU (Inertial Measurement Unit) with a 3D its front-view camera image and performing color masking
accelerometer, 3D compass, and 3D gyroscope, and Hall and blob detection. If a line is detected, the robot moves
effect encoders on each motor for odometry. according to the class of a detected object nearby, such as a
right-only sign or a stop sign.
IV. D RIVING M ODES AND C ONTROL A RCHITECTURE
A. Driving modes A. Lane tracking algorithms
The Go-CHART can drive in two modes: Autonomous and The Go-CHART can use two methods for lane tracking:
Remote-Control. In Autonomous mode, the robot navigates (1) techniques from the OpenCV library [16] that apply
through the testbed environment without any human inter- Gaussian blur, canny edge detection, color masking, and
vention by tracking lanes and recognizing and responding to the Hough transform to a region of interest in the front-
particular objects that it detects with its sensors. In Remote- view camera image; or (2) end-to-end behavioral cloning
Control mode, a user remotely drives the Go-CHART around (NVIDIA neural network model) [12], which imitates human
the testbed using the driving station shown in Fig. 6, which driving behaviors. The second method is more computation-
includes a Logitech G920 steering wheel with an accelerator ally intensive than the first, but more robust to environmental
and brake pedals. The monitor in the driving station displays changes if it is trained with sufficiently diverse data sets.
the video feeds from all four cameras on the Go-CHART, In the first method, each camera on the Go-CHART is
providing a nearly 360◦ view of the environment in real- initially calibrated individually to obtain its intrinsic and
time with low latency (as low as 50 µs). The monitor extrinsic parameters. In addition, LDR sensor readings are
also displays odometry readings, which are scaled down obtained to perform brightness correction, making the sys-
to mph. The deviations of the steering wheel and pedals tem robust to changing lighting conditions (particularly a
from their neutral positions are transmitted remotely using change in brightness, which affects OpenCV edge detection
2268
Authorized licensed use limited to: ASU Library. Downloaded on May 18,2021 at 05:13:24 UTC from IEEE Xplore. Restrictions apply.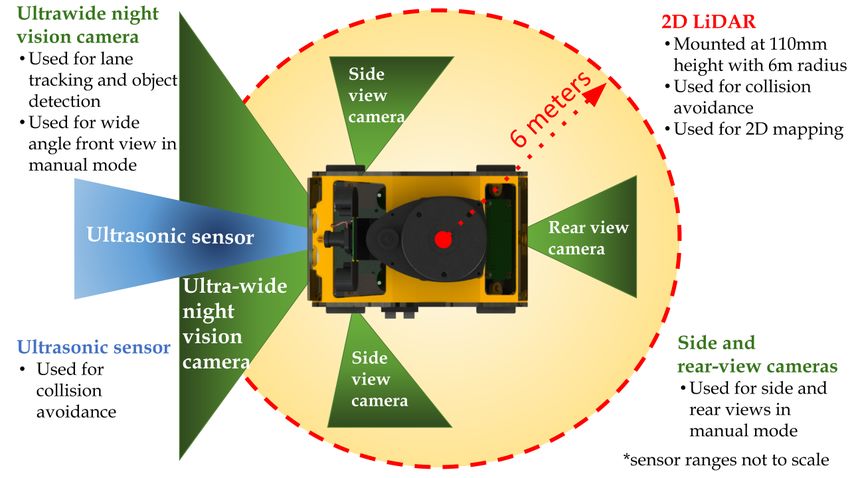
Fig. 4. Vision and range sensors on the Go-CHART.
Fig. 5. Go-CHART control architecture.
techniques). The image obtained from the front-view camera In the second method, a deep learning technique called
is converted to gray-scale, and a Gaussian blur of kernel size end-to-end behavioral cloning (NVIDIA model) is used to
5×5 is performed on a trapezium-shaped region of interest, perform lane tracking. The Go-CHART is remotely driven
defined on the lower half of the image. Canny edge detection around the testbed, and the front-view camera images and
is applied to this region to detect sharp changes in adjacent corresponding steering wheel error values are recorded. The
pixel intensity. Following this step, the Hough transform is neural network is trained with these error values as inputs.
performed to accurately detect the boundaries of the lanes Once trained, the network can replicate the same input
in the image, which are used to compute the steering angle behavior exhibited by the driver. Then, for an input camera
required for the Go-CHART to stay within the lanes. image, the network outputs an error value that is used in the
2269
Authorized licensed use limited to: ASU Library. Downloaded on May 18,2021 at 05:13:24 UTC from IEEE Xplore. Restrictions apply.VI. E XPERIMENTS
In this section, we demonstrate the capabilities of the Go-
CHART on the small-scale driving testbed shown in Fig. 1
and evaluate the performance of its lane tracking and object
identification algorithms.
A. Lane tracking
Demonstrations of the two lane-tracking methods de-
scribed in Section V-A are shown in the supplementary
video. When the Go-CHART uses the first lane-tracking
method, the blue lines in the video indicate the lane sections
that the robot tracks. This method performs lane tracking
in real-time at 30 FPS without any latency. To implement
the second lane-tracking method, the neural network was
trained as described in Section V-A. Each camera image in
the training data set was preprocessed as follows in order
to meet the requirements of the NVIDIA neural network.
First, a trapezium-shaped region of interest is defined in
the image, and this region is converted to YUV color
space. The trapezium image is stretched and resized into a
rectangular image. Three regions of dimensions 352 × 288
pixels are selected from this rectangular image and then are
translated by 25 pixels and rotated by 1◦ with respect to
each other. Around 3000 images and steering error values
were collected; 80% were utilized as training data, and
the remaining 20% were used as validation data. Since the
available data set was limited, the images were subjected
to data augmentation techniques to improve learning and
significantly reduce the training loss. Using the RTX 2080 Ti
GPU, the neural network required around 8 min to train per
epoch. The network was trained for a total of 300 epochs.
The trained model can be used to predict the Go-CHART
steering angle for the given input image using the external
Fig. 6. Top: Driving station setup for Remote-Control driving mode. GPU. When implemented on the Jetson TX2, the network
Bottom: Monitor in the driving station displaying video streams from the predicts the steering angle at a rate of approximately 5-7
front-view, side-view, and rear-view cameras onboard the Go-CHART. angle values per second for the given input image size.
B. Object detection
PD steering controller (see Section III-B). In order to run both the YOLOv3 and Tiny YOLO
object detection algorithms, the video feed from the front-
view camera (frame size 320 × 240 pixels) was wirelessly
B. Object detection algorithms streamed at 30 FPS over the wireless network to the GPU
on which the trained neural network model is executed to
To enable the Go-CHART to perform real-time detection predict the object classes of interest.
of objects in the testbed, such as other Go-CHARTs and To detect U.S. traffic signs and signals and other Go-
traffic signs and signals, we tested YOLOv3 [10], Tiny CHARTs, we needed to create a custom data set of images.
YOLO [11], ResNet [15], and Faster RCNN [13]. Ultimately, Both YOLOv3 and Tiny YOLO were trained on custom
YOLOv3 [10] and Tiny YOLO [11] were selected since they data by transfer learning from the pre-trained COCO data
detected objects with high accuracy at considerably higher set [14], which consists of around 200,000 labeled images
frame rates than the other algorithms, given limited GPU and around 91 different object classes. We trained the neural
processing power (128 CUDA cores), and performed well network on 10 custom object classes, shown at the bottom of
on low-resolution live video streams with varying latency. Fig. 7: speed limit sign, stop sign, pedestrian crossing sign,
This enabled their use for real-time object detection, which traffic light sign, traffic signal (red, yellow, and green), T
was critical for the Autonomous driving mode. Low detection intersection sign, turning vehicles yield sign, and Go-CHART
rates and low identification accuracy can cause the robot robot. The custom data set was collected from the front-
to miss critical environmental features, potentially causing view camera wireless video stream, stored in an external
accidents. computer, and processed using techniques such as resizing
2270
Authorized licensed use limited to: ASU Library. Downloaded on May 18,2021 at 05:13:24 UTC from IEEE Xplore. Restrictions apply.Fig. 7. YOLOv3 object detection results for the video feed from the Go-CHART front-view camera, with bounding boxes and class confidence levels
shown. The neural network was trained on the object classes given in the bottom row. Note: The traffic signal includes 3 different object classes: red,
yellow and green.
TABLE III
and annotation. It is important to record the images from the
I NFERENCE SPEED AND MEAN AVERAGE PRECISION OF YOLOV 3 AND
wireless stream, although some images might be blurred and
T INY YOLO, TESTED ON J ETSON TX2
low-resolution, so that the network is trained to be robust to
such images. This eases the strain on the network bandwidth Algorithm Input image Inference mAP (Mean Av-
due to video streams from multiple Go-CHARTs, and also size in pixels speed (FPS) erage Precision)
enables the YOLO network to produce faster results. Around 640 × 480 0.8 76.39
480 × 360 1.9 75.37
300 different images per class were obtained (a total of YOLOv3
320 × 240 4.7 68.96
around 3000 images), and bounding boxes were manually 160 × 120 9.1 22.21
marked on the regions of interest in all the images with their 640 × 480 8.3 54.62
480 × 360 12.6 41.72
corresponding class labels. The training took around 30 min Tiny YOLO
320 × 240 18.3 34.38
per epoch and required at least 20 epochs to obtain accurate 160 × 120 19.9 16.79
predictions. However, we trained for 100 epochs in order
to obtain higher confidence values for the detected classes.
The number of epochs required for training decreases as the
Figure 7 and the supplementary video show object detec-
number of classes and size of the training data set for each
tion results using the YOLOv3 algorithm. If one or multiple
class increase.
object classes of interest are present in a particular frame
After the model was trained, it was executed on the Jetson from the video feed, the algorithm displays the detected
TX2. The model is loaded after an initial boot-up delay object class(es), the prediction accuracy for each class, and
of up to 90 s. Once loaded, object detection is performed the bounding box dimension and position of the bounding
considerably quickly, at around 3-5 FPS for YOLOv3 and box. The prediction accuracy is set at a threshold value of
up to 18 FPS for Tiny YOLO. The major trade-off between 40% to ignore false positives. This threshold is relatively low
the two algorithms is that YOLOv3 provides accurate results because the prediction accuracy can decrease significantly for
but requires higher GPU usage, while the opposite is true for blurry, low-resolution images from the camera on a moving
Tiny YOLO. Table III lists the inference speeds and mAP Go-CHART. Despite this, Figure 7 and the supplementary
(Mean Average Precision) of both the YOLOv3 and Tiny video show that the algorithm is generally effective at
YOLO algorithms, tested for four image sizes with 10 input identifying objects in the testbed.
images of each size. The Go-CHART decides on its next action based on the
2271
Authorized licensed use limited to: ASU Library. Downloaded on May 18,2021 at 05:13:24 UTC from IEEE Xplore. Restrictions apply.type(s) of objects that it currently detects and the relevant [5] Sertac Karaman, Ariel Anders, Michael Boulet, Jane Connor, Kenneth
traffic rules (e.g., stopping when a red light or stop sign Gregson, Winter Guerra, Owen Guldner, et al. Project-based, collab-
orative, algorithmic robotics for high school students: Programming
is detected). When the Go-CHART detects multiple traffic self-driving race cars at MIT. In 2017 IEEE Integrated STEM Educa-
lights at an intersection, it bases its next action on the traffic tion Conference (ISEC), pp. 195-203. IEEE, 2017.
light with the largest bounding box, since that light is likely [6] Daniel Pickem, Paul Glotfelter, Li Wang, Mark Mote, Aaron Ames,
Eric Feron, and Magnus Egerstedt. The Robotarium: A remotely
to be the closest one to the robot. The supplementary video accessible swarm robotics research testbed. In 2017 IEEE Interna-
shows scenarios in which (1) the Go-CHART stops at a red tional Conference on Robotics and Automation (ICRA), pp. 1699-1706.
light in an intersection and resumes driving when the light IEEE, 2017.
[7] Joseph Betthauser, Daniel Benavides, Jeff Schornick, Neal O’Hara,
turns green, and (2) the robot stops at a stop sign and waits Jimit Patel, Jeremy Cole, and Edgar Lobaton. WolfBot: A distributed
for another Go-CHART with the right-of-way to cross in mobile sensing platform for research and education. In Proceedings of
front of it before driving forward. the 2014 Zone 1 Conference of the American Society for Engineering
Education, pp. 1-8. IEEE, 2014.
[8] Adam Stager, Luke Bhan, Andreas Malikopoulos, and Liuhui Zhao.
VII. CONCLUSION AND FUTURE WORK A scaled smart city for experimental validation of connected and
automated vehicles. arXiv preprint arXiv:1710.11408 (2017).
In this paper, we have presented the design, capabili- [9] Rakshith Subramanyam (2018). CHARTOPOLIS: A Self Driving Car
Test Bed. Master’s Thesis in Electrical Engineering, Arizona State
ties, and control architecture of the Go-CHART, a low-cost University.
miniature robot that emulates a self-driving car. The Go- [10] Joseph Redmon and Ali Farhadi. YOLOv3: An incremental improve-
CHART can also be controlled remotely by a user who views ment. arXiv preprint arXiv:1804.02767 (2018).
[11] Rachel Huang, Jonathan Pedoeem, and Cuixian Chen. YOLO-LITE: A
the environment through the robot’s four onboard cameras real-time object detection algorithm optimized for non-GPU comput-
from a driving station. This capability will enable us to ers. In 2018 IEEE International Conference on Big Data (Big Data),
conduct experiments on interactions between human-driven pp. 2503-2510. IEEE, 2018.
[12] Mariusz Bojarski, Davide Del Testa, Daniel Dworakowski, Bernhard
and self-driving vehicles in a safe, controlled environment. Firner, Beat Flepp, Prasoon Goyal, Lawrence D. Jackel et al. End to
We describe lane-tracking and object detection algorithms end learning for self-driving cars. arXiv preprint arXiv:1604.07316
and demonstrate their implementation on a Go-CHART that (2016).
[13] Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun. Faster
autonomously navigates a miniature driving testbed, with its R-CNN: Towards real-time object detection with region proposal
processing power augmented by an external GPU. We plan to networks. In Advances in Neural Information Processing Systems, pp.
expand the driving testbed to include additional traffic signs, 91-99. 2015.
[14] Xinlei Chen, Hao Fang, Tsung-Yi Lin, Ramakrishna Vedantam,
dynamic lighting conditions, reconfigurable buildings, and Saurabh Gupta, Piotr Dollár, and C. Lawrence Zitnick. Microsoft
media projections to customize the environment. We also COCO captions: Data collection and evaluation server. arXiv preprint
plan to add artificial fog, which will enable us to develop arXiv:1504.00325 (2015).
[15] Sasha Targ, Diogo Almeida, and Kevin Lyman. Resnet in Resnet:
algorithms for real-time defogging using only the robot’s on- Generalizing residual architectures. arXiv preprint arXiv:1603.08029
board monocular cameras. In addition, we will replace the (2016).
robot’s front-view camera with an RGBD camera to enable [16] G. Bradski. The OpenCV Library. Dr. Dobb’s Journal of Software
Tools, vol. 25, no. 11, pp. 120–126, 2000.
tests of real-time visual SLAM algorithms. [17] Google Maps: Miniatur Wunderland. Accessed: 2020-07-31.
[Online] Available: https://www.google.com/maps/about/behind-the-
ACKNOWLEDGMENTS scenes/streetview/treks/miniatur-wunderland/
[18] University of Michigan Mcity. Accessed: 2020-07-31. [Online] Avail-
The authors thank Sreenithy Chandran (ASU) for helping able: https://mcity.umich.edu/
[19] Karen Hao. “The latest fake town built for self-driving cars has
to implement the deep learning techniques and Sangeet Ulhas opened in South Korea.” Quartz, Nov. 6, 2017. Accessed: 2020-07-31.
(ASU), Rakshith Subramanyam (ASU), Karthik Ganesan [Online] Available: https://qz.com/1121372/south-korea-opens-k-city-
(ASU), and Sritanay Vedartham (BASIS Scottsdale) for the-latest-fake-town-built-for-self-driving-cars/
[20] Millbrook: Connected and Autonomous Vehicle
helping build the testbed. Testing. Accessed: 2020-07-31. [Online] Available:
https://www.millbrook.us/services/connected-and-autonomous-
R EFERENCES vehicle-testing/
[21] Srinivasa, S.S., Lancaster, P., Michalove, J., Schmittle, M., Rockett,
C.S.M., Smith, J.R., Choudhury, S., Mavrogiannis, C. and Sadeghi, F.
[1] Liam Paull, Jacopo Tani, Heejin Ahn, Javier Alonso-Mora, Luca
MuSHR: A low-cost, open-source robotic racecar for education and
Carlone, Michal Cap, Yu Fan Chen, et al. Duckietown: an open, in-
research. arXiv preprint arXiv:1908.08031 (2019).
expensive and flexible platform for autonomy education and research.
[22] Balaji, B., Mallya, S., Genc, S., Gupta, S., Dirac, L., Khare, V.,
In 2017 IEEE International Conference on Robotics and Automation
Roy, G., Sun, T., Tao, Y., Townsend, B. and Calleja, E. DeepRacer:
(ICRA), pp. 1497-1504. IEEE, 2017.
Educational autonomous racing platform for experimentation with
[2] Sean Wilson, Ruben Gameros, Michael Sheely, Matthew Lin, Kathryn sim2real reinforcement learning. arXiv preprint arXiv:1911.01562
Dover, Robert Gevorkyan, Matt Haberland, Andrea Bertozzi, and (2019).
Spring Berman. Pheeno, a versatile swarm robotic research and [23] W. Roscoe. Donkey Car: An opensource DIY self driving plat-
education platform. IEEE Robotics and Automation Letters vol. 1, no. form for small scale cars. Accessed: 2020-07-31. [Online] Available:
2, pp. 884-891, July 2016. https://www.donkeycar.com
[3] Nicholas Hyldmar, Yijun He, and Amanda Prorok. A fleet of miniature [24] NVIDIA Autonomous Machines. Accessed: 2020-07-31.
cars for experiments in cooperative driving. In 2019 IEEE Interna- [Online] Available: https://www.nvidia.com/en-us/autonomous-
tional Conference on Robotics and Automation (ICRA), pp. 3238-3244. machines/embedded-systems/jetbot-ai-robot-kit/
IEEE, 2019. [25] “Go-CHART: A miniature remotely accessible self-driving car
[4] Alexander Liniger, Alexander Domahidi, and Manfred Morari. robot,” Autonomous Collective Systems Laboratory Youtube channel,
Optimization-based autonomous racing of 1:43 scale RC cars. Optimal https://www.youtube.com/watch?v=pAa61VpF6oQ
Control Applications and Methods 36(5):628-647, 2015.
2272
Authorized licensed use limited to: ASU Library. Downloaded on May 18,2021 at 05:13:24 UTC from IEEE Xplore. Restrictions apply.You can also read