One Dimensional Convection: Interpolation Models for CFD
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
One Dimensional Convection:
Interpolation Models for CFD
Gerald Recktenwald∗
January 28, 2014
Abstract
A finite-volume model of the one-dimensional convection-diffusion equa-
tion is described and implemented in Matlab. This well-known problem
has an exact solution, which is used to compare the behavior and accuracy
of the central difference and upwind difference schemes. Matlab codes
for both schemes are developed and numerical solutions are presented on
sequences of finer meshes. As the mesh size is reduced, the dependency
of the truncation error on mesh size for both schemes is verified. The ex-
istence and cause of oscillatory solutions for the central difference scheme
are explained. The central difference scheme is shown to be superior the
upwind method – contrary to older versions of conventional wisdom – so
long as the mesh is suitably refined. The rich literature of alternative
convective modeling schemes is not addressed here.
1 Introduction
Finite volume methods are widely used in computational fluid dynamics (CFD)
codes. The elementary finite volume method uses a cell-centered mesh and
finite-difference approximations of first order derivatives. This paper shows how
the finite volume method is applied to a simple model of convective transport:
the one-dimensional convection-diffusion equation.
There are two primary goals of this paper. The first is to expose the finite
volume method. Readers interested in additional details, including application
to the Navier-Stokes equations, should consult the classic text by Patankar [4].
Ferziger and Perić [2] give a more up-to-date discussion of finite volume meth-
ods, but without the low level details presented in this paper. Versteeg and
Malalasekera [5] provide a detailed discussion of the topics described in this
paper, although their presentation does not deal with the effect of non-uniform
meshes. Abbott and Basco [1] provide a basic analysis of convection modeling
for the transient version of the one-dimensional convection-diffusion equation.
Wesseling [7] gives a mathematically rigorous treatment of the finite volume
method, including a discussion of different approximations to the convective
terms.
∗ Mechanical and Materials Engineering Department, Portland State University, Portland,
OR, 97201, gerry@pdx.edu2 THE CONVECTION-DIFFUSION EQUATION 2
1 50
0.9
5
0.8
0.7
1
0.6
0
φ
0.5 −1
0.4
0.3 −5
0.2
0.1
−50
0
0 0.2 0.4 0.6 0.8 1
x
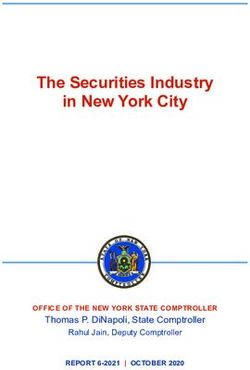
Figure 1: Exact solution to Equation (1) subject to the boundary conditions
φ(0) = 1 and φ(1) = 0. Parameter labels on the curves are values of P eL .
The second goal of this paper is to introduce and compare the central dif-
ference scheme and the upwind scheme for modeling the convective term in
transport equations. The one-dimensional convection-diffusion equation is a
compact, though somewhat non-physical, model of transport of heat, mass and
other passive scalars. Applying the finite volume method to this equation allows
different schemes for approximating the convection term to be compared.
This paper should be considered a brief introduction to the topic of convec-
tion modeling schemes. Only the two schemes are considered and the analysis
only involves one model equation.
2 The Convection-Diffusion Equation
The one-dimensional convection-diffusion equation is
d d dφ
(uφ) − Γ −S =0 (1)
dx dx dx
The dependent variable φ is a scalar that is transported by the velocity u, which
is constant. The diffusion coefficient is Γ, and S is a volumetric source term.
For S = 0 and the boundary conditions
φ(0) = φ0 φ(L) = φL , (2)
the exact solution to Equation (1) is
φ − φ0 exp(ux/Γ) − 1
= (3)
φL − φ0 exp(PeL ) − 1
where
uL
PeL = (4)
Γ3 THE FINITE VOLUME MESH 3
is the Peclet number, the dimensionless parameter that describes the relative
strength of convection (u) to diffusion (Γ/L).
Figure 1 shows a family of solutions to Equation (1) with boundary condi-
tions φ(0) = 1 and φ(1) = 0. For large PeL , the φ distribution is nearly uniform
except for a thin layer near the x = L boundary. Negative u (velocity from
right to left) causes the φ profile to be shifted to the left instead of the right.
As PeL → 0 the effect of convection disappears and the solution to Equa-
tion (1), subject to the boundary conditions in (2), is
φ − φ0 x
= (5)
φL − φ0 L
When u = 0 and S = 0, Equation (1) becomes the one-dimensional Laplace
equation, which describes heat conduction through a slab with uniform con-
ductivity. Equation (5) is the solution to the one-dimensional heat conduction
problem with fixed end temperatures.
3 The Finite Volume Mesh
In the finite difference method, the mesh is defined by the location of nodes in
space (and possibly time). In the finite volume method, the spatial domain of
the physical problem is subdivided into non-overlapping cells or control volumes.
A single node is located at the geometric centroid of the control volume1 . In the
finite volume method, the numerical approximation is obtained by integrating
the governing equation over the control volume. The nodal volumes are used to
compute the flux of dependent variable from one control volume into the next.
Figure 2 shows a typical control volume in a Cartesian coordinate system.
Since we are only concerned with one-dimensional diffusion problems, the nodes
above and below the control volume are not shown.
Figure 2 also introduces compass point notation. The node at xi is referred
to as point P. Relative to P, the node at xi+1 is labeled E for east, and the node
at xi−1 is labeled W for west. The cell face between P and E is at xe , and the
cell face between W and P is at xw . The convention is that upper case letters
(P, E, W) refer to the location of the nodes, and the lower case letters (e, w)
refer to the cell faces.
The use of the dual notation may seem cumbersome at first. However,
compass point notation is very convenient for the derivation of the discrete
approximation to Equation (1). The use of nodal indices such as i, i + 1, and
i − 1 is still important, especially when implementing the finite volume method
in a computer code.
Figure 3 depicts a group of control volumes along the x axis. The left and
right edges are the boundaries of the domain. Two nodes, i = 1 and i = m,
are on the boundaries, and do not have cell volumes2 . These nodes are used to
implement boundary conditions.
1 There are other ways to define the locations of nodes relative to the boundaries of the
control volume. Locating the node at the centroid is a popular scheme.
2 An alternative view is that the control volumes for i = 1 and i = m have zero width, and
hence zero volume.4 THE CENTRAL-DIFFERENCE FINITE VOLUME MODEL 4
4 The Central-Difference Finite Volume Model
To obtain the finite volume model, Equation (1) is integrated over the control
volume shown in Figure 2.
Z xe Z xe Z xe
d(uφ) d dφ
dx − Γ dx − S dx = 0 (6)
xw dx xw dx dx xw
In the following sections, each term in this equation is evaluated and simplified
separately. The parts are then reassembled into a discrete equation relating φ
at node P to the φ values at nodes E and W.
4.1 The Diffusion Term
The second term in Equation (6) expresses the balance of transport by diffusion
into the control volume3 . The integral can be evaluated exactly.
Z xe
d dφ dφ dφ
Γ dx = Γ − Γ (7)
xw dx dx dx e dx w
The two diffusive fluxes are replaced by finite-difference approximations
dφ φE − φP
Γ ≈ Γe = De (φE − φP )
dx e δxe
dφ φP − φW
Γ ≈ Γw = Dw (φP − φW )
dx w δxw
where
Γe Γw
De = Dw = (8)
δxe δxw
and
δxe = xE − xP δxw = xP − xW . (9)
3 For example, if φ = T (temperature) and Γ = k (thermal conductivity), the diffusion term
is the net conduction of heat into the control volume.
δxw δxe
W P E
∆y
xi-1 xi xi+1
y
∆x
x xw xe
Figure 2: One-dimensional control volume.4 THE CENTRAL-DIFFERENCE FINITE VOLUME MODEL 5
∆x2 ∆xm−1
...
i=1 2 3 m −2 m−1 m
...
δxw,2 δxe,2 δxw,m−1 δxe,m−1
Figure 3: A one-dimensional mesh used to solve Equation (1). The mesh is
depicted as uniform, but the finite volume method is not restricted to uniform
meshes.
Remember that φP , φE , and φW are the values of φ at the nodes P, E, and W
in Figure 2. These are the discrete unknowns that are obtained by solution of
the finite volume model equations.
In this paper only the case of uniform Γ is considered, so Γe = Γw = Γ.
Nonuniform Γ is easily handled by the finite volume method [4]. Using the
terms just defined, Equation (7) becomes
Z xe
∂ ∂φ
Γ dx ≈ De (φE − φP ) − Dw (φP − φW ) (10)
xw ∂x ∂x
4.2 The Source Term
The discrete contribution of the source term is obtained by assuming that S has
the uniform value of SP throughout the control volume. Thus,
Z xe
S dx ≈ SP ∆xp . (11)
xw
The distribution of SP is supplied as an input to the model. The finite volume
method also allows source terms to depend on φ. (See, e.g., [4]).
4.3 The Convection Term
The convective term in Equation (6) can be integrated once exactly.
Z xe
d(uφ)
dx = (uφ)e − (uφ)w (12)
xw dx
To evaluate the right hand side of the preceding expression, the values of φe and
φw need to be estimated. In the finite volume method, the values of φ are stored
only at the nodes P, E, and W. The method for determining an interface value
(say, φe ) from the nodal values (say, φP and φE ) has important consequences
for the accuracy of the numerical model of Equation (1).
A straightforward method for estimating φe in terms of the nodal values φE
and φP is linear interpolation, as depicted in Figure 4. The linear interpolation
formula can be written
φe = βe φE + (1 − βe )φP (13)4 THE CENTRAL-DIFFERENCE FINITE VOLUME MODEL 6
ϕW
ϕP
ϕE
xW xw xP xe xE
Figure 4: Linear interpolation to obtain interface values φw and φe for the
central difference approximation.
where
xe − xP
βe = (14)
xE − xP
Equations (13) and (14) constitute the central difference scheme for approxi-
mating the derivatives4 .
Using linear interpolation to estimate φw in terms of φW and φP gives
φw = βw φW + (1 − βw )φP (15)
where
xP − xw
βw = . (16)
xP − xW
If the mesh is uniform and the nodes are located midway between the cell faces,
then βw = βe = 1/2.
Substituting Equation (13) and Equation (15) into Equation (12) and rear-
ranging gives
Z xe
d(uφ)
dx = ue βe (φE − φP ) − uw βw (φW − φP ) + ue φP − uw φP (17)
xw dx
The last two terms in the preceding equation cancel because u is a uniform
parameter, i.e. ue = uw . Therefore, Equation (17) simplifies to5
Z xe
d(uφ)
dx = ue βe (φE − φP ) − uw βw (φW − φP ) (18)
xw dx
4.4 The Discrete φ Equation
Substituting Equation (10), Equation (11) and Equation (18) into Equation (6)
and simplifying gives
−aE φE + aP φP − aW φW = b (19)
4 The title comes from the finite-difference approach to modeling Equation (1). The first
order central difference approximation to the convective term at the interface (x = xe ) is
d(uφ) (uφ)E − (uφ)P
≈
dx e xE − xP
5 Repeating this derivation for two- or three-dimensional convection models requires invoca-
tion of the discrete form of the continuity equation. The one-dimensional continuity equation
is du/dx = 0. Integrating this equation over the control volume gives ue − uw = 0. This
computation is not necessary in the one-dimensional case, because u is a fixed parameter and
u = ue = uw .4 THE CENTRAL-DIFFERENCE FINITE VOLUME MODEL 7
where
1
aE = (De − ue βe ) (20)
∆xP
1
aW = (Dw + uw βw ) (21)
∆xP
aP = aE + aW (22)
b = SP (23)
Equation (19) applies to each internal node in the computational domain.
The system of equations for m nodes (including boundary nodes) can be
written in matrix notation as
aP,1 −aE,1 φ1 b1
−aW,2 aP,2 −aE,2 φ2 b2
.. ..
.. .. ..
. . . . .
=
(24)
−aW,i aP,i −aE,i φ i bi
.. .. .. . .
. .. ..
. .
−aW,m aP,m φm bm
The system is tridiagonal, and is easily solved with a direct method called the
tridiagonal matrix algorithm.
4.5 Boundary Conditions
The boundary conditions in Equation (2) are enforced by modifying the coef-
ficients in Equation (24). For nodes 2 through m − 1, Equations (20) through
(23) define the coefficients in the matrix and the right hand side vector. Imple-
mentation of boundary conditions only concerns the first row and the last row
in Equation (24). Those equations are
aP,1 φ1 − aE,1 φ2 = b1
−aW,m φm−1 + aP,m φm = bm
Setting aP,1 = 1, aE,1 = 0, b1 = φ0 , and aW,m = 0, aP,m = 1, bm = φL . gives
the trivial equations
φ1 = φ0
φm = φL .
Thus, modifying the coefficients and source terms of the equations for the bound-
ary nodes allows the values those nodes to be specified. When the modified sys-
tem of equations is solved, the boundary nodes are fixed, and the values of the
interior nodes are consistent with the specified boundary values. It is relatively
straightforward to modifying the boundary node equations for other types of
boundary conditions. The procedures for doing so will not be discussed here.4 THE CENTRAL-DIFFERENCE FINITE VOLUME MODEL 8
4.6 Matlab Implementation
Numerical solutions to Equations (1) and (2) are obtained with the Matlab
functions central1D and demoConvect1D. The source codes for central1d and
demoConvect1D are given in Listing 1 and Listing 2 at the end of this article.
The central1D function defines a one-dimensional mesh and evaluates the
finite volume coefficients in Equation (20) through Equation (23) for given values
of u, Γ, and S. The demoConvect1D function calls central1D or upwind1D
(described later) to obtain the finite volume coefficients. demoConvect1D then
uses the tridiagSolve function from the NMM toolbox. The finite volume
solution is then compared with the exact solution.
4.7 Measuring the Truncation Error
Since the exact solution is given by Equation (3), the truncation error of the
numerical solution can be computed. Designate the exact solution at cell i as
φ(xi ). The error at cell i obtained with the central difference scheme is
ec,i = φc,i − φ(xi )
where φc,i is the value of φ at cell i obtained with the central difference scheme,
i.e.,, by the solution to Equation (24). The largest error in the domain is
max |ec,i | = ||ec ||∞
i
The width of the internal control volumes in the domain is ∆x. Replacing
L with ∆x in Equation (4) gives the mesh Peclet number.
u∆x
P ex = (25)
Γ
which describes the local strength of the convection and diffusion terms for an
individual control volume. PeL is the only true parameter of Equation (1). Pex
is an artifact of the mesh used to obtain the numerical approximation to the
solution. As the mesh is refined, ∆x → 0 and Pex → 0, while PeL is independent
of the mesh.
4.8 Performance of the Central Difference Scheme
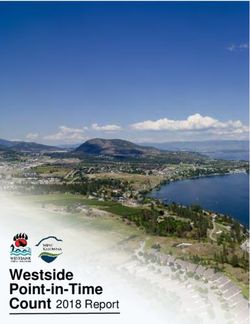
Running demoConvect1D with the default input parameters produces the plot
in Figure 5. The numerical solution oscillates with increasing magnitude as x
increases toward 1. By any reasonable measure, this numerical solution is a very
bad approximation to the exact solution.
The oscillations in the numerical solution can be reduced by solving the
problem with a finer mesh. For example
>> demoConvect1D(’CDS’,32)
produces the plot in Figure 6. Reducing the control volume width from ∆x = 0.1
to ∆x = 0.0333 reduces the mesh Peclet number from 5 to 1.7. The central
difference solution to Equation (1) will not oscillate as long as P ex < 2.4 THE CENTRAL-DIFFERENCE FINITE VOLUME MODEL 9
1.5
CDS solution
exact
1
φ
0.5
PeL = 50.0, Pex = 5.0
CDS scheme, Max error = 1.583
0
0 0.2 0.4 0.6 0.8 1
x
Figure 5: Central difference solutions to Equation (1) for P eL = 50, P ex = 5.
1.5
CDS solution
exact
1
φ
0.5
PeL = 50.0, Pex = 1.7
CDS scheme, Max error = 0.268
0
0 0.2 0.4 0.6 0.8 1
x
Figure 6: Central difference solutions to Equation (1) for P eL = 50, P ex = 1.7.5 UPWIND DIFFERENCING: A CURE WITH A COST 10
4.9 Consequences of Negative Coefficients
The oscillatory numerical solution shown in Figure 5 can be explained by the
existence of negative aE or aW in Equation (19). Consider the possible values
taken by aE , which is defined by Equation (20). For a uniform mesh, the
interpolation coefficient βe is
∆xP /2
βe =
δxe
and Equation (20) can be rearranged as
1 1 Γe ∆xP /2
aE = (De − ue βe ) = − ue
∆xP ∆xP δxe δxe
Γe P ex
= 1−
∆xP δxe 2
Since Γe /(∆xP δxe ) > 0 always, the magnitude of P ex determines the sign
of aE . Specifically, when P ex < 2, aE > 0, and when P ex ≥ 2, aE ≤ 0.
When aE < 0, the eigenvalues of the coefficient matrix in Equation (24) become
complex, and the numerical solution oscillates. See, e.g. Hoffman [3, Chapter 14]
or Wesseling [7, Chapter 4] for a proof.
The magnitude of P ex can always be kept below the threshold value of two
by choosing a sufficiently fine mesh. For one-dimensional problems, this is not
an issue. However, this P ex limit is also true for two- and three-dimensional
problems. In the early days of CFD, reducing the mesh spacing to guarantee
P ex < 2 was not always an option because memory was limited, and solutions
on fine meshes took too much time. Modern computers have enough memory
and floating point performance that selecting a sufficiently fine mesh to mini-
mize (or eliminate) oscillations is usually not a problem. Nonetheless, a more
robust formulation is still desirable for many practical problems, especially for
exploratory calculations on coarse meshes.
5 Upwind Differencing: A Cure with a Cost
The existence of oscillatory solutions for P ex > 2 is a nagging problem for the
central difference scheme. The oscillations can be completely eliminated with a
surprisingly simple modification. Unfortunately, this simple modification results
in a severe loss of accuracy in the computed result.
In § 4.9, it was asserted that the existence of a negative coefficients causes
the oscillation in the solution. A quick fix to this problem is to change the
interpolation scheme so that De − βe ue > 0 for any combination of ue , ∆xP
and Γe . The upwind scheme guarantees positive aE (and positive aW ) with the
following choice of βe and βw :
(
0 if ue ≥ 0
βe = (26)
1 if ue < 0
(
1 if uw ≥ 0
βw = (27)
0 if uw < 05 UPWIND DIFFERENCING: A CURE WITH A COST 11
uw > 0 ue > 0 uw < 0 ue < 0
ϕW ϕW
ϕP ϕE ϕP ϕE
xW xw xP xe xE xW xw xP xe xE
Figure 7: Upwind interpolation to obtain interface values φw and φe . For clar-
ity, we choose φW > φP > φE , though the magnitude of the φ values is not
important. The sign of u determines the value of φ assumed at the interface.
Figure 7 provides a graphical representation of the upwind difference scheme.
Compare the step-like φ(x) profiles for the upwind scheme in Figure 7 with the
linear profiles for the central difference scheme in Figure 4.
In the left half of Figure 7 the velocities are positive. When ue > 0, Equa-
tion (26) and Equation (13) combine to give φe = φP . Thus, the value of φ at
the east interface of the control volume is taken to be the nearest nodal value
on the upwind side of the interface.
Similarly, when uw > 0, Equation (27) and Equation (15) give φw = φW .
At both interfaces, the value of φ is determined by the upwind neighbor. In
the right half of Figure 7 the sign of the velocities is reversed, and the upwind
neighbors lie to the right of both interfaces.
5.1 Matlab Implementation
The coefficients of the upwind scheme are evaluated in the upwind1D function,
in Listing 3. The substantial difference between upwind1D and central1d is
that the β coefficients are computed with Equations (26) and (27) instead of
Equations (14) and (16).
The upwind difference solutions corresponding to Figure 5 and Figure 6 are
obtained with the following command line inputs
>> demoConvect1D(’UDS’)
>> demoConvect1D(’UDS’,32)
The output from the preceding commands is not shown here.
The compConvect1D function in Listing 4 evaluates both the central differ-
ence and upwind difference solutions, and plots these solutions along with the
exact solution. The following command line inputs create the plots in Figure 8.
>> compConvect1D
>> compConvect1D(32)
For both Pex = 5 and Pex = 1.7 the upwind difference scheme is free from oscil-
lations. In addition, the upwind difference scheme produces a smaller truncation
error than the central difference scheme for both of these meshes.5 UPWIND DIFFERENCING: A CURE WITH A COST 12
2
Central
Upwind
Exact
1.5
1
φ
0.5 PeL = 50.0, Pex = 5.0
||ec|| = 1.583, ||eu|| = 0.204
0
−0.5
0 0.2 0.4 0.6 0.8 1
x
2
Central
Upwind
Exact
1.5
1
φ
0.5 PeL = 50.0, Pex = 1.7
||ec|| = 0.268, ||eu|| = 0.122
0
−0.5
0 0.2 0.4 0.6 0.8 1
x
Figure 8: Numerical solutions to Equation (1) with the upwind difference scheme
and the central difference scheme for two different mesh sizes. The cell Peclet
number decreases as the number of cells increases.6 EFFECT OF MESH REFINEMENT 13
6 Effect of Mesh Refinement
In the preceding section, the numerical solutions obtained with the upwind
scheme are free of oscillations. Furthermore, the upwind solutions for Pex = 5
and Pex = 1.7 have smaller measured truncation errors than the central dif-
ference solutions. This apparent accuracy advantage is not true in all circum-
stances, however.
Mathematical analysis shows that the truncation errors for the upwind dif-
ference scheme and central difference scheme are O (∆x) and O ∆x2 , respec-
tively. (See, Ferziger and Perić [2, § 4.4] for a straightforward analysis.) Thus,
as the mesh is refined, we expect the error in the central difference solution to
decrease much more rapidly than the error in the upwind solution.
Table 1 shows the results of mesh refinement for the upwind and central
difference solutions to Equation (1). The same data is plotted in Figure 9. The
table and plot are constructed with the refineConvect1D function in Listing 5.
For large ∆x (large P ex ) the upwind difference scheme has a smaller error than
the central difference scheme. As ∆x and P ex are reduced, the error in the
central difference solution is reduced much more rapidly than the error in the
upwind solution.
The columns in Table 1 labeled “eu ratio” and “ec ratio” confirm the theo-
retical prediction of truncation errors. For a given value of m (given row in the
table), the value in the eu ratio column is the ratio of ||eu ||∞ for the preceding
row (previous m) to the value of ||eu ||∞ for the current m. For example, for
m = 512
0.0320
eu ratio = = 1.89.
0.0169
As ∆x → 0 the values of m in subsequent rows differ by a factor of two. The
upwind scheme has a theoretical truncation error that is O (∆x). By halving the
control volume width (by doubling m) one expects the truncation error, which
is proportional to ||eu ||∞ , to be reduced by a factor of two. As m increases, the
values in the eu ratio column are approaching two. The value of the eu ratio at
large m is more representative of the truncation error because the truncation
error estimate holds as ∆x → 0.
The central difference scheme has a theoretical truncation error that is
O ∆x2 . Halving the control volume widths reduces the truncation error by a
factor of four, as indicated by the values in the last column of Table 1. Thus,
although the upwind scheme is more accurate than the central difference scheme
on the coarsest mesh, the improvement in accuracy as ∆x is reduced shows that
the central difference scheme is superior.
6.1 Non-uniform Meshes
Uniform refinement of a uniform mesh is often not the best use of computa-
tional resources (memory and processing time). For the one-dimensional prob-
lem discussed in this article, the computational cost of mesh refinement is of
no practical concern. However, for industrial applications of CFD, non-uniform
meshes are often essential in order to obtain acceptably accurate results with
modest computing resources.
The basic idea of non-uniform mesh refinement is to use smaller control
volume widths (smaller node spacing) in regions where the gradient of the de-6 EFFECT OF MESH REFINEMENT 14
Table 1: Variation of error with mesh spacing for upwind and central difference
schemes. Numerical solutions obtained at P eL = 50. m − 2 is the number of
internal control volumes (cells) in the model.
Upwind Central Difference
m ∆x P ex ||eu ||∞ eu ratio ||ec ||∞ ec ratio
8 0.166667 8.33 0.1780 3.4154
16 0.071429 3.57 0.1913 0.93 0.9534 3.58
32 0.033333 1.67 0.1225 1.56 0.2679 3.56
64 0.016129 0.81 0.0962 1.27 0.0714 3.75
128 0.007937 0.40 0.0569 1.69 0.0184 3.87
256 0.003937 0.20 0.0320 1.78 0.0047 3.93
512 0.001961 0.10 0.0169 1.89 0.0012 3.97
1024 0.000978 0.05 0.0087 1.94 0.0003 3.98
2048 0.000489 0.02 0.0044 1.97 0.00007 3.99
1
10
Central
Upwind
0
10
−1
10
Max error
−2
10
−3
10
−4
10
−5
10 −4 −3 −2 −1 0
10 10 10 10 10
∆x
Figure 9: Reduction in error as mesh is refined for upwind and central difference
schemes. The plot data is from the ∆x, ||eu ||∞ , and ||ec ||∞ columns in Table 1.6 EFFECT OF MESH REFINEMENT 15
pendent variable is large. For the solution to the boundary value problem shown
graphically in Figure 8, the steepest gradients are near the x = L boundary for
u > 0 (or PeL > 0). We expect that locally refining the mesh near x = L should
improve the accuracy of the solution.
Figure 10 shows one common method of creating a non-uniform mesh. The
width of adjacent control volumes differs by a constant factor, i.e.
∆xi+1
=r (28)
∆xi
where r is a fixed constant. To create such a mesh, one specifies the total length
L of the region to be subdivided, the stretching ratio r, and the number of
control volumes n. The widths of the control volumes must add up to L, viz.
n
X
L= ∆xi = ∆x1 + r∆x1 + r2 ∆x1 + . . . + rn−1 ∆x1
i=1
= ∆x1 1 + r + r2 + . . . + rn−1
Define
1 − rn
S = 1 + r + r2 + . . . + rn−1 = (29)
1−r
where the second equality is an identity. Thus, L = ∆x1 S or
L
∆x1 = . (30)
S
To create a mesh with a geometric progression of sizes
1. Specify L, r, and n.
2. Compute ∆x1 from Equation (30).
3. Compute the remaining cell widths with a loop.
These calculations are performed by the fvMesh function in Listing 6. The
demoStretchMesh function uses the fvMesh function to create and plot a one-
dimensional with r > 1 and another with r < 1.
The central1D, upwind1D, and compConvect1D functions allow specification
of the mesh stretch ratio r. For example, the following Matlab session com-
pares the performance of the central difference and upwind difference scheme
on a mesh with 38 control volumes that decrease in size by a factor of 0.95.
>> compConvect1D(40,5,0.1,0.95)
PeL = 50.000 Pex_ave, max(Pex), min(Pex) = 1.316, 2.915, 0.437
Max error = 2.222e-002 for CDS scheme
Max error = 6.476e-002 for UDS scheme
The solutions are plotted in Figure 11. Note that the average cell Pex is less than
2, but the maximum Pex is greater than two. This shows that the oscillations
in the central difference solution depend on the gradient of the solution as well
as the local Pex .7 SUMMARY 16
7 Summary
The results of computations presented in this paper support the following con-
clusions.
• Numerical solutions to Equation (1) obtained with the central difference
scheme on a uniform mesh will oscillate if P ex > 2.
• Numerical solutions to Equation (1) obtained with the upwind difference
scheme never oscillate for any value of P ex .
• The stability provided by the upwind difference scheme is obtained with
a loss of accuracy. The upwind difference scheme has a truncation error
that is O (∆x).
• The truncation error of the central difference scheme is O ∆x2 .
• A non-uniform mesh can be used to reduce or eliminate oscillations in the
computed solution if the cells with smaller size (closer mesh spacing) is
concentrated in regions with steep gradients in the solutions
The mesh refinement exercise verifies that the central difference scheme is
indeed more accurate than the upwind scheme for sufficiently fine meshes. This
is especially apparent from the plot of errors in Figure 9. The existence of
oscillatory solutions from the central difference scheme is a worry. However,
since one goal of most numerical modeling is (or should be) to obtain mesh-
independent solutions, the more rapidly convergent central difference scheme is
preferred.
The reader should be aware that there are many more schemes for inter-
polation in the convection-diffusion equation. A recent paper by Wang and
Hutter [6] compares no fewer than twelve methods. In addition to accuracy, one
must be concerned about computational cost for multidimensional problems and
numerical stability.
Ferziger and Perić caution against relying too heavily on performance com-
parisons obtained from solving Equation (1). They state [2, §3.11]
Indeed, use of this problem as a test cast has probably produced
more poor choices of method than any other in the field. Despite
these difficulties, we shall consider this problem as some of the issues
it raises are worthy of attention.
The toy codes presented in this paper provide sample implementations of
the central difference and upwind difference schemes for the one-dimensional
advection-diffusion equation. Numerical results demonstrate the oscillations
produced by the central difference scheme on coarse meshes, as well as the
superior reduction in truncation error obtained by the central difference scheme
as the mesh is refined.
References
[1] Michael B. Abbot and D.R. Basco. Computational Fluid Dynamics: An
Introduction for Engineers. Longman, Essex, UK, 1989.REFERENCES 17
[2] Joel H. Ferziger and Milovan Perić. Computational Methods for Fluid Dy-
namics. Springer-Verlag, Berlin, third edition, 2001.
[3] Joe D. Hoffman. Numerical Methods for Engineers and Scientists. McGraw-
Hill, New York, 1992.
[4] S.V. Patankar. Numerical Heat Transfer and Fluid Flow. Hemisphere, Wash-
ington D.C., 1980.
[5] H.K. Versteeg and W. Malalasekera. An Introduction to Computational Fluid
Dynamics: The Finite Volume Method. Longman, Essex, UK, 1995.
[6] Yongqi Wang and Kolumban Hutter. Comparisons of numerical methods
with respect to convectively dominanted problems. International Journal
for Numerical Methods in Fluids, 37:721–745, 2001.
[7] Pieter Wesseling. Principles of Computational Fluid Dynamics. Springer,
Heidelberg, 2001.
Appendix: Code Listings
Table 2: Matlab functions used to implement and test the finite-volume ap-
proximation to one-dimensional, convection-diffusion equation.
m-file Description
central1D Evaluate control-volume, finite-difference coefficients
using the central difference scheme for the convection
terms.
compConvect1D Compare central difference and upwind difference so-
lutions to the model problem.
demoConvect1D Solve the model problem with central difference or
upwind difference schemes. Compute and print the
truncation error.
demoStretchMesh Create visual representation of stretched meshes.
fvMesh1D Create variables that define a one-dimensional finite-
volume mesh. Uniform and stretched meshes can be
created.
refineConvect1D Solve the model problem with central difference or
upwind difference schemes on a sequence of finer
meshes. Compute and print the truncation error.
upwind1D Evaluate control-volume, finite-difference coefficients
using the upwind difference scheme for the convec-
tion terms.REFERENCES 18
L
∆x1 ∆x2 ∆x3 ∆xn
Figure 10: Non-uniform mesh based on geometric progression of control volume
widths.
2
Central
Upwind
Exact
1.5
1
φ
0.5 PeL = 50.0, Pex = 1.3
||ec|| = 0.022, ||eu|| = 0.065
0
−0.5
0 0.2 0.4 0.6 0.8 1
x
Figure 11: Solution of the model problem on a nonuniform mesh with 38 control
volumes and a stretch ratio of 0.95.REFERENCES 19
function [aw,ap,ae,b] = central1D(u,gam,x,xw,dx,delxw,phib,src)
% central1D Central difference coefficients for 1D advection-diffusion equation
%
% Synopsis: [aw,ap,ae,b] = central1D(u,gam,x,xw,phib)
% [aw,ap,ae,b] = central1D(u,gam,x,xw,phib,src)
%
% Input: u = (scalar) uniform velocity.
% gam = (scalar) uniform diffusion coefficient
% x = vector of positions of cell centers. There are m-2 interior cells.
% xw = vector of positions of west faces of cells.
% phib = two-element vector containing boundary values. phib(1) = phi at x=0;
% phib(2) = phi at x=xlen
% src = (optional) source term. If no value is given, src=0 is assumed. If
% src is a scalar (constant), it is replicated as a uniform source term.
% Otherwise, src can be a row or column vector with m elements. The i=1
% and i=m elements are ignored, as these correspond to boundary nodes.
%
% Output: aw,ap,ae = coefficients of 3 point central difference scheme
% b = right hand side vector
% x = vector of locations of cell centers
if nargin replicate for all cells
b = src*ones(m,1);
elseif numel(src) == m % src is properly sized
b = src(:); % make sure it’s a column vector
else
error(’size(src) = %d %d is incompatible with mesh definition’,m);
end
% --- Apply boundary conditions
ap(1) = 1; ae(1) = 0; b(1) = phib(1); % prescribed phi at west boundary
aw(m) = 0; ap(m) = 1; b(m) = phib(2); % prescribed phi at east boundary
Listing 1: The central1d function computes the finite volume coefficients for
one-dimensional, convection diffusion equation using central differencing for the
convection term.REFERENCES 20 function demoConvect1D(scheme,m,u,gam,r) % demoConvect1D Test finite volume solution to 1D advection-diffusion equation % % Synopsis: demoConvect1D % demoConvect1D(scheme) % demoConvect1D(scheme,m) % demoConvect1D(scheme,m,u,) % demoConvect1D(scheme,m,u,gam) % demoConvect1D(scheme,m,u,gam,r) % % Input: scheme = (optional,string) indicates convection modeling scheme % scheme = ’UDS’ for upwind differencing % ’CDS’ for central differencing % m = (optional) total number of nodes; Default: m = 12 % Internal cell width = 1/(m-2). Domain length is 1 % u = (optional, scalar) uniform velocity. Default: u = 5 % gam = (optional, scalar) diffusion coefficient; Default: gam = 0.1 % r = mesh stretching ratio. If r=1, mesh is uniform % If r>1 control volume widths increase with x. If r
REFERENCES 21
function [aw,ap,ae,b] = upwind1D(u,gam,x,xw,dx,delxw,phib,src)
% upwind1D Upwind difference coefficients for 1D advection-diffusion equation
%
% Synopsis: [aw,ap,ae,b] = upwind1D(u,gam,x,xw,phib)
% [aw,ap,ae,b] = upwind1D(u,gam,x,xw,phib,src)
%
% Input: u = (scalar) uniform velocity.
% gam = (scalar) uniform diffusion coefficient
% x = vector of positions of cell centers. There are m-2 interior cells.
% xw = vector of positions of west faces of cells.
% phib = two-element vector containing boundary values. phib(1) = phi at x=0;
% phib(2) = phi at x=xlen
% src = (optional) source term. If no value is given, src=0 is assumed. If
% src is a scalar (constant), it is replicated as a uniform source term.
% Otherwise, src can be a row or column vector with m elements. The i=1
% and i=m elements are ignored, as these correspond to boundary nodes.
%
% Output: aw,ap,ae = coefficients of 3 point upwind difference scheme
% b = right hand side vector
% x = vector of locations of cell centers
if nargin0
bw = 1; be = 0;
else
bw = 0; be = 1;
end
for i=2:m-1
ae(i) = (gam/delxw(i+1) - u*be)/dx(i);
aw(i) = (gam/delxw(i) + u*bw)/dx(i);
end
ap = ae + aw; % ap is a vector with same shape as ae and aw
% --- Create right hand side vector
if numel(src) == 1 % src is a scalar ==> replicate for all cells
b = src*ones(m,1);
elseif numel(src) == m % src is properly sized
b = src(:); % make sure it’s a column vector
else
error(’size(src) = %d %d is incompatible with mesh definition’,m);
end
% --- Apply boundary conditions
ap(1) = 1; ae(1) = 0; b(1) = phib(1); % prescribed phi at west boundary
aw(m) = 0; ap(m) = 1; b(m) = phib(2); % prescribed phi at east boundary
Listing 3: The upwind1d function computes the finite volume coefficients for
one-dimensional, convection diffusion equation using upwind differencing for
the convection term.REFERENCES 22 function compConvect1D(m,u,gam,r) % compConvect1D Compare CDS and UDS schemes for 1D advection-diffusion equation. % Plot a comparision with exact solution, and print truncation errors. % % Synopsis: compConvect1D % compConvect1D(m) % compConvect1D(m,u) % compConvect1D(m,u,gam) % compConvect1D(m,u,gam,r) % % Input: m = total number of nodes; Number of interior cells is m-2 % u = (scalar) uniform velocity. % gam = (scalar) uniform diffusion coefficient % r = mesh stretching ratio. If r=1, mesh is uniform % % Output: Plot of central difference and upwind difference solutions. Print % out of truncation errors if nargin
REFERENCES 23 function refineConvect1D(mm,u,gam) % refineConvect1D Mesh refinement of solutions to 1D advection-diffusion equation. % Obtain CDS and UDS solutions at different mesh sizes. % % Synopsis: refineConvect1D % refineConvect1D(mm) % refineConvect1D(mm,u) % refineConvect1D(mm,u,gam) % % Input: mm = vector of m values. m is the number of nodes (including boundary % nodes) in the domain. Default: mm = [8 16 32 64 128 256 512]. % CDS and UDS solutions are obtained for each m in mm. % u = (optional, scalar) uniform velocity. Default: u = 5 % gam = (optional, scalar) diffusion coefficient; Default: gam = 0.1 % % Output: Table of truncation errors versus mesh size. Plot of same data. if nargin
REFERENCES 24 function [x,xw,dx,delxw] = fvMesh1D(nx,xlen,r) % fvMesh1D Create one-dimensional finite-volume mesh. Uniform meshes and % stretched non-uniform meshes are supported. % % Synopsis: [x,xw] = fvMesh1D % [x,xw] = fvMesh1D(nx) % [x,xw] = fvMesh1D(nx,xlen) % [x,xw] = fvMesh1D(nx,xlen,r) % [x,xw,dx] = fvMesh1D(...) % [x,xw,dx,delxw] = fvMesh1D(...) % % Input: nx = Number of cells (internal CVs, not nodes). Default: nx=10 % xlen = overall length of the mesh. Default: xlen = 1 % r = growth ratio: dx(i+1) = r*dx(i). Default: r = 1, i.e mesh % is uniform. If r>1 control volume widths increase with x. % If r
You can also read