SimDem - A Multi-agent Simulation Environment to Model Persons with Dementia and their Assistance
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

SimDem – A Multi-agent Simulation Environment to Model Persons with
Dementia and their Assistance
Muhammad Salman Shaukat1 , Bjarne Christian Hiller1 , Sebastian Bader1 and Thomas Kirste1
1
Department of Computer Science, University of Rostock, Rostock, Germany
Abstract is a mental representation of an environment. It is hypothe-
arXiv:2107.05346v1 [cs.AI] 12 Jul 2021
sized that spatial information of the environment (e.g., land-
Developing artificial intelligence based assistive marks, goals, boundaries etc.) is encoded within spatial cells
systems to aid Persons with Dementia (PwD) re- found in our hippocampus that guides our spatial orientation
quires large amounts of training data. However, [Hartley et al., 2014]. Hence, we represent cognitive map as a
data collection poses ethical, legal, economic, and combination of spatial grid cells that encode spatial semantics
logistic issues. Synthetic data generation tools, in of the environment such as goal area, boundaries, landmarks
this regard, provide a potential solution. However, etc. Moreover, PwD show a decline in spatial competence as
we believe that already available such tools do not the disease progresses, this decline is believed to be linked
adequately reflect cognitive deficiencies in behav- with the ability to “memorize” such a cognitive map [Cough-
ior simulation. To counter these issues we propose lan et al., 2018]. We utilize this concept as the cognitive ca-
a simulation model (SimDem ) that primarily fo- pacity to quantify spatial competence. Based on mentioned
cuses on cognitive impairments suffered by PwD cognitive principles, in this article, we present SimDem : A
and can be easily configured and adapted by the Multi-agent Simulation Environment to Model Persons with
users to model and evaluate assistive solutions. Dementia and their Assistance for indoor environments.
2 Related Work
1 Introduction
Huang et al. (2016) proposed the IndoorSTG tool to gen-
Dementia refers to various symptoms that result in impair- erate trajectories of customers and assistants in a shopping
ment of memory, critical thinking, ability to conduct simple mall based on random movement for customers and location-
daily tasks. Dementia has become a major concern world- likelihood based probabilistic movement for assistants. Li et
wide, and puts a significant burden on the healthcare sec- al. (2016) proposed the Vita tool that takes a more micro-
tor. Emerging assistive technologies have the potential to re- scopic approach and allows movement customization. Ryoo
lieve caregiver’s burden, improve quality-of-life of PwD, and et al. (2016) pointed out the lack of movement customiza-
reduce overall cost associated with the caregiving process. tion and semantic indoor context in IndoorSTG and Vita and
However, to assess the usefulness of these assistive technolo- introduced walking speeds based on location, movement con-
gies, clinical experiments involving PwD are required which straints (e.g., boundaries) and mobility settings for each indi-
pose ethical, legal, economical, and logistic concerns related vidual.
to the data collection process. In this regard, a simulation However, these tools do not consider cognitive impairment
model that could generate synthetic data on PwD’s navigation and only consider healthy individuals. Tailoring these simu-
behavior and their response towards assistance could bring a lation systems to model PwD is either infeasible (e.g., pro-
potential solution for model building and validation. ducing random walk) or not possible at all (e.g., availabil-
A critical aspect for modeling PwD’s behavior is their spa- ity). Therefore, we investigated computational models that
tial navigation, which is an aggregated task of wayfinding account for wayfinding uncertainty, to incorporate them in
and locomotion. Wayfinding refers to the allocentric cogni- our simulation architecture, that refers to the way-finder’s un-
tive element of the navigation task that involves tactical and certainty over choosing correct path, and goal etc. Najian and
strategic planning to guide the movement (e.g., goal selec- Dean (2017) proposed a model to simulate human wayfind-
tion, route determination). Whereas locomotion refers to the ing that focused on quantifying effects of dementia by intro-
egocentric physical process of the movement to reach a loca- ducing agent-based parameters such as attention zone (i.e.,
tion (e.g., walking, taking a turn) [Darken and Peterson, 2002; radius, arc length) and spatial orientation abilities through
Gunzelmann and Lyon, 2006]. landmark recognition. Manning et al. (2014) proposed a
Cognitive competence associated with egocentric and al- cognitive map based spatial learning mechanism, MAGEL-
locentric strategies can be represented as a cognitive map, a LAN, in their taxicab driving simulation. To correlate cogni-
term first introduced by Tolman (1948). The cognitive map tive ability with wayfinding uncertainty, they utilized cogni-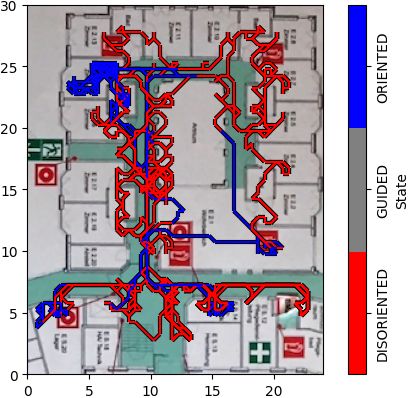
tive parameters vision and memory. Andresen et al. (2016) the context. For instance, the smart watch agent should be
presented a wayfinding model using the concept of cognitive able to communicate with the PwD agent (e.g., issuing a re-
map along with semantic spatial knowledge (e.g., common minder for an appointment) and with the nursing agent (e.g.,
rooms and circulation rooms). Kielar et al. (2017) mod- notifying the nurse if the PwD agent needs a physical inter-
eled spatial and social cognition associated with wayfinding vention). Furthermore, The nurse agent should have the abil-
by proposing routing methods to model navigation based on ity to takeover the PwD agent (i.e., the PwD agent should fol-
perfect knowledge and uncertain knowledge of the environ- low the nurse agent) when required. Ideally, the simulation
ment. Zhao et al. (2011) proposed a egocentric and allocen- model should incorporate the concept of non-compliance in
tric based navigation model based on cognitive architecture, certain situations where the PwD agent might refuse to follow
Adaptive Control of Thought-Rationale (ACT-R). Majority a fixed schedule or might not cooperate with the nursing staff.
of reviewed literature only accounted for healthy individuals, However, our current model assumes that PwD agents are al-
however, spatial knowledge representation as cognitive maps ways cooperative with others and do not oppose their sched-
provides a potential solution to model navigation behavior for ule. Moreover, human type agents should be able to perceive
PwD. In addition to model based approaches, interactive ap- the environment such as a PwD agent visualizing landmarks
proaches can provide a more comprehensive and controlled or nurse agent perceiving a disoriented PwD agent.
activity datasets, however they require user-interaction and Schedule and Needs: To plan a PwD’s day or appointments
thus limits extensive data generation [Synnott et al., 2015]. a schedule is required that can be followed by the PwD agent.
Therefore, we chose a model based approach to design the Moreover, PwD’s physiological (e.g., sleep, toilet) and psy-
simulation system presented in this work. chological (e.g., socializing) needs should also be incorpo-
rated.
3 The SimDem model
3.2 SimDem Concept
3.1 Requirements Environment: To model an environment, continuous coor-
To identify the simulation model requirements, let us consider dinate systems enable precise modeling of spatial relation-
a case-study: Mr. Alois is a permanent resident at a nursing ships. However, due to their computation complexity, pedes-
home who is provided with a personal smart watch that as- trian behavior simulations adapt space discretization tech-
sists him in managing his daily tasks. He starts his day with niques to reduce computational expensiveness. As identified
breakfast at 8:00 and has a scheduled medical examination in Nasir et al.(2014), we represent environment as a two-
that he forgot. The smart watch gives a reminder notification dimensional orthogonal grid of size n×m. Grid cells are con-
to him which happens to be successful and he reaches the nected via Moore neighborhood with a side length of 50cm
examination spot 5 minutes later. Later that day, Mr. Alois for each cell. To avoid collision among agents, each cell can
goes for lunch at 12:00 on his own without any assistance. be occupied by a single agent a time. Each grid cell encodes
At 15:00, he has physiotherapy, but despite the navigational spatial features such as locations (e.g., living room, clinic,
aid of the smart watch, he gets lost constantly. Upon observ- toilet etc), boundaries, and spatial landmarks. From the cog-
ing his behavior, the smart watch eventually calls the nursing nitive perspective, grid map with spatial information forms
staff with his location. The nurse then reaches Mr. Alois and the basis for PwD type agent’s cognitive map as we discuss
accompanies him to the physiotherapy appointment. Other later. Formally, we define the spatial environment as a pair
than scheduled appointments, Mr. Alois satisfies his physio- function (V, Σ) where V is the set of grid cells and Σ is the
logical (e.g., sleep, toilet) and social (e.g., meeting with other spatial feature encoded by each grid cell.
residents) needs. Spatial landmarks such as signs, picture on Vision: Visual cues (i.e., landmarks) can help PwD to re-
wall, often help Mr. Alois during navigation. The case-study gain their orientation depending on their intrinsic ability to
illustrates that a successful smart watch based intervention recognise them [Najian and Dean, 2017]. Similarly, upon
can improve PwD’s independence and decrease the amount seeing a disoriented PwD, a nurse can decide whether to inter-
of human resources being spent on the PwD. Therefore, an vene or not. To model visual perception for simulated agents,
important requirement of the simulation system is to incorpo- we used a simple ray-casting procedure based on the algo-
rate the smart-watch based assistance which can be later used rithm described by Amanatides et al. (1987). We used pa-
to evaluate different intervention strategies that might help to rameters sight and field of view (FOV) where sight is radius
improve the efficiency of such assistance. Further require- of the circle segment that represents agent’s attention zone
ments are as follows: and FOV is the angle of the circle segment that represents at-
Environment: The Simulation model must incorporate a tention zone. FOV is only used for PwD type agent to model
spatial representation of the environment to represent spatial an impaired vision.
information of the environment such as places (e.g., clinic,
dining area, toilets), spatial landmarks, and boundaries (e.g., Agents: In the following, we briefly introduce abilities and
walls and obstacles). role of each agent type of agent.
Agents: The Model should be able to simulate different types PwD: To simulate the behavior of PwD we adapted the cog-
of agents with different abilities and roles. We focus on nitive architecture MicroPsi [Bach, 2003] which defines the
three main types of agents: 1) PwD agent, 2) Nurse agent, 3) behavior in terms of three basic drives, namely Physiologi-
Smart-watch agent. Moreover, different types of agent should cal (e.g., sleep, toilet) , Social (i.e., meeting people to seek
be able to interact where the type of interaction depends on affiliation), and Cognitive (e.g., competence and reduction of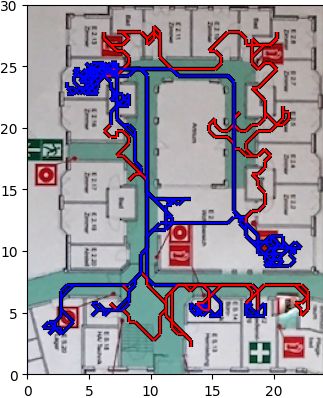
uncertainty) desires. We incorporated the desire to reduce un- model, we define the navigation process by two distinct Act
certainty in our navigation model whereas physiological and and Percept methods. At each simulation step, a PwD type
social desires are modeled as needs along with the desire for agent executes the percept/act cycle and tries to navigate to-
competence which is similar to the need of meeting ones ap- wards his current goal. During the percept step, an agent per-
pointments (i.e., following a schedule). We define need as a ceives his environment and stores features from visible grid
pair (R, qN ), where R ⊆ Σ is the set of grid cell features re- cells (i.e., within sight s and FOV αF OV ) in his cognitive
quested by this need in order to satisfy it (e.g., “toilet”) and map (c). If the agent is currently disoriented (q = qD ), he tries
qN ∈ {q0 , q1 } is the state of the need that specifies, whether to reset his uncertainty based on visible landmarks (if there
the need is currently active (q1 ) or not (q0 ). are any) with a probability defined by the agent’s landmark
The cognitive map, as discussed in the introduction, repre- function (fλ ), and if successful, the agent reorients himself
sents the spatial competence of the PwD agent. We define the by adding grid cells that represent his current goal into his
cognitive map in terms of the PwD agent’s ability to “mem- working memory (M ). After all visible grid cells have been
orize” the grid map environment (V, Σ). Hence the cognitive processed by the agent, the navigation process proceeds with
map is a triple (M , c, pc ) where: the act method to compute the route for agent’s current goal.
• M ⊆ V is a set of grid cells and describes the agents If the agent’s current working memory holds all the goal fea-
working memory. As the agent moves around, perceived tures, state (q) is set to be oriented (qO ) and a shortest path
grid cells will be automatically added to the working (from current location to goal) is chosen as a route. However,
memory. if the working memory does not contain information about
• c ∈ N is the capacity of the agents cognitive map, i.e., the goal, the state is set to be disoriented (qD ) and PwD agent
the maximum number of grid cells that the agent can exhibits an exploration behavior by visiting the closest grid
remember at the same time. Once the capacity is ex- cells that are not present in his cognitive map at the moment in
ceeded, grid cells will be removed from the working an attempt to reduce his uncertainty. This navigation behav-
memory in the order they were added. ior is in principle similar to the finding reported by Manning
• pc ∈ [0, 1] denotes the probability per simulation step, et al. (2014).
that a currently stored grid cell will be forgotten and re- Nurses: A nurse agent can guide the PwD agent (when dis-
moved from the working memory. oriented) towards his current goal. We define a nurse agent
Utilizing the concepts above we define a PwD type agent as a 5-tuple (x, h, q, s, ap ) where:
as an 11-tuple (x, h, S, pS , N , c, q, s, αF OV , fλ , fi ), where: • x and h are same as for the PwD type agent.
• x ∈ V and h ⊆ Σ denote agent’s current position and set • q ∈ {qI , qP , qG } is the nurse’s state, i.e., if the nurse is
of features that define PwD agent’s home, i.e.,his per- currently idling (qI ), pursuing a disoriented PwD (qP )
sonal room respectively. or guiding a PwD to his destination (qG ).
• N = (n0 , n1 , . . . , nk ) is a tuple of needs, that the PwD • s ∈ R+ is the nurse’s sight, which is a complete circle
type agent may experience and include physiological contrary to PwD type agent.
(e.g., sleep) and psychological (e.g., socialising) desires • ap is the slot for a PwD type agent that currently needs
along with the need to meet appointments. Appoint- help from the nurse.
ments are represented in form of a daily schedule (S)
that contains the time and location of each appointment. Normally, a nurse agent is in idle state (q = qI ) at her home
Whereas pS ∈ [0, 1] is the probability that a PwD might location (h), until a PwD agent requires assistance. There are
forget an appointment. two ways to know if assistance is required or not: either a
PwD agent must be in nurse’s sight (we assume that nurse
• c represents agent’s cognitive map and q ∈ {qO , qD , qG }
always knows if a PwD agent is disoriented/oriented) or she
is the agent’s cognitive state, i.e., if PwD is oriented
get informed by PwD agent’s smart watch. Consequently, if
(qO ), disoriented (qD ) or currently guided by a nurse
assistance is required, nurse starts pursuing the PwD agent
type agent (qG ).
(q = qP ) and takes the lead to guide (q = qG ) him towards
• s ∈ R+ and αF OV ∈ R+ represent PwD agent’s sight his current goal.
and field of view respectively.
• fλ : Σ 7→ [0, 1] is the landmark function, that assigns Smart Watch: Each PwD type agent can be equipped with
each landmark a probability that the agent will regain a personal smart watch that can assist them in their daily rou-
orientation after perceiving a grid cell of the given fea- tine. We define the smart watch agent as an 8-tuple (ap , q,
ture. τcd , pd , nhelp , n) where:
• fi : {iR , iN } 7→ [0, 1] is the intervention function and • ap is the PwD agent monitored by the smart watch.
specifies the probability that a reminder or navigation • q ∈ {qM , qW } is the state of the smart watch, i.e., if it
intervention triggered by a smart watch is successful. is currently monitoring the PwD (qM ) or waiting for a
To model the PwD agent’s navigation we utilized the naviga- nurse to help the PwD (qW ).
tion model proposed in [Darken and Peterson, 2002] which • τcd ∈ R+ is the cooldown time, i.e., the amount of time
models the navigation process into 4 steps: 1) exploratory in seconds, that has to pass after an unsuccessful inter-
process of perception, 2) strategic process of goal forming, vention, before another intervention will be attempted.
3) tactical process of route selection, and 4) operational pro- • pd ∈ [0, 1] represents the sensor model of the smart
cess of motion. In our model, adapting the above-mentioned watch and denotes the probability for each simulation
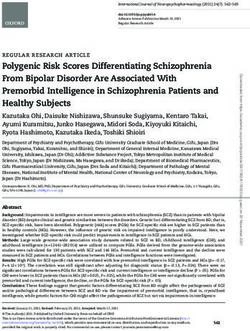
(a) (b) (c) (d) (e)
Figure 1: (a) floor plan of the nursing home, (b) grid image based on (a) : colors represent different aspect of the nursing home such as
hallway(green), walls (black), toilet(blue), trajectories of PwD agent having cognitive capacity 100% (c), 50% (d), and 10% (e)
step that disorientation of the monitored PwD is detected form of plots and videos for later analysis. We implemented
by the smart-Watch. SimDem for an existing nursing home for PwD. Figure 1,
• nhelp ∈ N∗ denotes the maximum number of consecu- shows the floor plan of the nursing home and its transformed
tive, failed interventions (n ∈ N), before a help interven- grid image.
tion is taken.
At each simulation step, the smart watch monitors the PwD 3.4 Generalizability
agent and decides whether to trigger one of three (i.e., Nav- Even though we designed and developed our system for PwD
igation, Reminder, Help) interventions. A navigation inter- and nursing homes as primary application domain, it is not
vention is triggered if the PwD agent is disoriented and if the limited to it. Every environment which can be abstracted by a
disorientation is detected by the smart watch based on its sen- grid-based layout of typed cells can be modeled. Those envi-
sor model (pd ). A successful navigation intervention will re- ronments can be populated by agents of various types. In this
sult in the PwD agent getting reoriented by adding his current paper, we introduced our cognitive model-based patient agent
goal into his cognitive map. Similarly, a reminder interven- and simpler agents (nurse and watch). The cognitive model is
tion is invoked if the PwD agent forgets a certain appoint- also not limited to dementia or other forms of cognitive im-
ment. In this case the PwD agent is reminded to go to this pairments but is inspired by general cognitive architectures
particular appointment. After each of these interventions, the based on needs, desires and cognitive maps of the environ-
smart watch goes into cool-down model (τcd ) before the next ment to realize plausible behavior simulations.
intervention is triggered. If these interventions show no ef-
fect, and number of interventions exceeds the maximum limit 4 Experiments & Evaluation
(nhelp ), a help intervention is made and a next available nurse
agent closest to the PwD agent is asked to guide the PwD We evaluated the SimDem model against three cases to sim-
agent and the smart watch goes into waiting mode (qW ). ulate navigation behavior with 1) no assistance, 2) nurse as-
sistance 3) nurse and smart-watch assistance. Since there are
3.3 Implementation a large number of possible parameter combinations, we kept
SimDem is implemented in Python (3.7) using the agent- the number of variables minimum to report our results in this
based modeling framework Mesa. The spatial structure of the work. For all experiments, we only change PwD type agent’s
environment is represented as a PNG grid image where each cognitive capacity within four values (i.e., 100%, 50%, 10%),
grid cell (i.e., pixel) is color-encoded and represents seman- remaining parameters shown in table 1. Results (table 2)
tic features of the environment (e.g., living room, toilet, land- show that PwD agent’s travel efficiency (T E), which is the
marks etc). Grid image is then represented as a directed graph mean ratio of shortest distance to traveled distance, starts de-
that includes accessible cells as its vertices and euclidean dis- creasing as his cognitive capacity decreases as PwD agent
tance as edge weights. Based on findings by Andresen et al. becomes lost more often and his path becomes more tortu-
(2016), a “spatial discomfort” penalty is applied by penaliz- ous (note that T E is 0.91 at 100% capacity instead of 1.0
ing walking areas that are right next to boundaries and obsta- because of the discomfort penalty mentioned in section 3.3).
cles such that agents keep a realistic distance from them. Path A similar association of level of dementia and its impact
computations are done using the Floyd-Warshall algorithm on travel efficiency is reported in [Martino-Saltzman et al.,
and can be stored for later uses to keep the simulation time 1991]. Moreover, the number of disorientation episodes (n)
minimum. Moreover, agent-specific parameters are stored in increase as cognitive capacity decreases. With nurse assis-
JSON files and adding multiple agents in the simulation is tance, T E increases for the same levels of cognitive capacity
quite straightforward. Regarding the evaluation support, sim- and the PwD agent starts getting less disoriented or his disori-
ulations based on user-defined parameters and environment entation episodes become shorter. Similarly, the addition of
can be executed easily. For each simulation; agents’ files are smart watch agent improves PwD agent’s T E and saves nurse
generated that include their trajectories, states etc. These files agent’s time as less human guidance is required. Moreover,
are then used to visualize agents’ behavior and interaction in the duration of disorientation decreases significantly when us-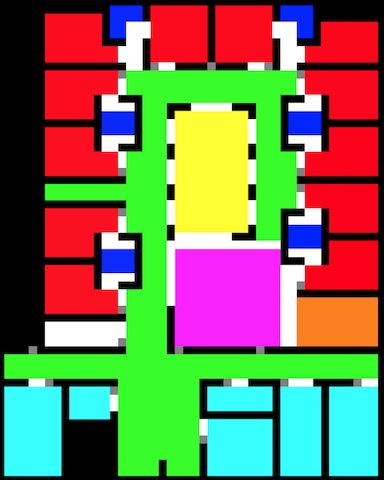
No assistance Nurse assistance Nurse & Watch assistance
ing a smart watch as the PwD agent does not only rely on the Capacity(%) TE Disorientation States(%) TE Disorientation States(%) TE Disorientation States(%)
n episode duration qO qD qG n episode duration qO qD qG n episode duration qO qD qG
nurse agent anymore to regain his orientation. µ σ µ σ µ σ
100 0.91 0 n/a n/a 100 0 0 0.91 0 n/a n/a 100 0 0 0.91 0 n/a n/a 100 0 0
50 0.85 3 122 21 92 8 0 0.86 3 88 51 93 5 2 0.90 2 25 28 99 1 0
10 0.52 25 81 91 58 42 0 0.71 22 21 32 77 10 13 0.81 29 8 6 85 5 10
5 Conclusion and Future Work
Table 2: Simulation results showing assistance effect on PwD
SimDem offers a potential way-forward in providing syn- agent’s spatial orientation. Where T E (Travel Efficiency) is the
thetic data on PwD’s navigation behavior and their response mean ratio of shortest distance to travelled distance, n is number of
towards assistance that is essential for modeling and validat- disorientation episodes and µ and σ are mean and standard deviation
ing assistive technologies. One limitation of our model is the of episodes.
assumption of perfectly compliant PwD who do not oppose
their schedule and always comply with the nurse agent, there- [Huang et al., 2013] Chuanlin Huang, Peiquan Jin, et al. In-
fore we plan to introduce non-compliant PwD in the future. doorSTG: A flexible tool to generate trajectory data for
Moreover, comparison against ground truth data is also es- indoor moving objects. In 2013 IEEE 14th International
sential and planned for the future to validate our model. Conference on Mobile Data Management, pages 341–343.
IEEE, 2013.
Acknowledgements [Kielar et al., 2018] Peter M Kielar, Daniel H Biedermann,
This research is funded by the German Federal Ministry et al. A unified pedestrian routing model for graph-based
of Education and Research (BMBF) as part of the EIDEC wayfinding built on cognitive principles. Transportmetrica
project (01GP1901C), and by the European Union (EU, A: transport science, 14(5-6):406–432, 2018.
EFRE) as part of the SAMi project (TBI-1-103-VBW-035). [Li et al., 2016] Huan Li, Hua Lu, et al. Vita: A versa-
tile toolkit for generating indoor mobility data for real-
References world buildings. Proceedings of the VLDB Endowment,
[Amanatides et al., 1987] John Amanatides, Andrew Woo, 9(13):1453–1456, 2016.
et al. A fast voxel traversal algorithm for ray tracing. In [Manning et al., 2014] Jeremy R. Manning, Timothy F. Lew,
Eurographics, volume 87, pages 3–10, 1987. et al. MAGELLAN: A cognitive map–based model of
[Andresen et al., 2016] Erik Andresen, David Haensel, et al. human wayfinding. Journal of Experimental Psychology:
General, 143(3):1314–1330, 2014.
Wayfinding and cognitive maps for pedestrian models. In
Traffic and Granular Flow’15, pages 249–256. Springer, [Martino-Saltzman et al., 1991] David Martino-Saltzman,
2016. Bruce B Blasch, et al. Travel behavior of nursing home
residents perceived as wanderers and nonwanderers. The
[Bach, 2003] Joscha Bach. The micropsi agent architec-
Gerontologist, 31(5):666–672, 1991.
ture. In Proceedings of ICCM-5, international conference
on cognitive modeling, Bamberg, Germany, pages 15–20. [Najian and Dean, 2017] Amir Najian and Denis J. Dean.
Citeseer, 2003. Simulation of human wayfinding uncertainties: Opera-
tionalizing a wandering disutility function. In Advances in
[Coughlan et al., 2018] Gillian Coughlan, Jan Laczó, et al.
Geocomputation, pages 425–435. Springer International
Spatial navigation deficits—overlooked cognitive marker Publishing, 2017.
for preclinical alzheimer disease? Nature Reviews Neurol-
ogy, 14(8):496–506, 2018. [Nasir et al., 2014] Mojdeh Nasir, Chee Peng Lim, et al. Pre-
diction of pedestrians routes within a built environment
[Darken and Peterson, 2002] Rudolph P Darken and Barry in normal conditions. Expert Systems with Applications,
Peterson. Spatial orientation, wayfinding, and representa- 41(10):4975–4988, 2014.
tion. In Handbook of virtual environments, pages 533–558.
[Ryoo et al., 2016] Hyung-Gyu Ryoo, Soojin Kim, et al.
CRC Press, 2002.
Generation of moving object trajectories in indoor space.
[Gunzelmann and Lyon, 2006] Glenn Gunzelmann and In Proceedings of the Eighth ACM SIGSPATIAL Inter-
Don R Lyon. Mechanisms for human spatial competence. national Workshop on Indoor Spatial Awareness, ISA
In International Conference on Spatial Cognition, pages ’16, pages 43–46. Association for Computing Machinery,
288–307. Springer, 2006. 2016.
[Hartley et al., 2014] Tom Hartley, Colin Lever, et al. Space [Synnott et al., 2015] Jonathan Synnott, Chris Nugent, et al.
in the brain: how the hippocampal formation supports spa- Simulation of smart home activity datasets. Sensors
tial cognition. Philosophical Transactions of the Royal So- (Basel, Switzerland), 15:14162–79, 06 2015.
ciety B: Biological Sciences, 369(1635):20120510, 2014. [Tolman, 1948] Edward C. Tolman. Cognitive maps in rats
and men. Psychological Review, 55(4):189–208, 1948.
Patient Watch Nurse [Zhao et al., 2011] Changkun Zhao, Jeremiah W Hiam, et al.
S pS pc s αF OV fλ fi τcd pd nhelp s A multi-strategy spatial navigation model in a text-based
as in sec 3.1 0 0 5 90 0.1 0.8 60 0.1 3 10 environment. In Proceedings of the 20th Conference
on Behavior Representation in Modeling and Simulation,
Table 1: Agent-specific parameters for experiments pages 251–258, 2011.You can also read