A Comparison of Protocols for Updating Location Information
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
A Comparison of Protocols for Updating Location Information
Alexander Leonhardi and Kurt Rothermel
Institute of Parallel and Distributed
High-Performance Systems (IPVR)
University of Stuttgart
Breitwiesenstr. 20-22
70565 Stuttgart, Germany
alexander.leonhardi@informatik.uni-stuttgart.de
Technical Report 2000/05
Department of Computer Science
University of Stuttgart
March 2000
Abstract example a printer. The location information for these ob-
jects may have been acquired by di erent types of sensor
The detailed location information of mobile objects, for systems and therefore has di erent degrees of accuracy.
example that of a user with a mobile computer or phone, If the location information is acquired on the mobile ob-
is an important input for many location-aware applications. ject itself (e.g., via GPS), it has to be transmitted from the
However, constantly updating the location information for mobile object to a location server using wireless communi-
thousands of mobile objects is not feasible. Update protocols cation. In case of a distributed service, where the location
for location information therefore use the special properties information is cached or replicated on a number of servers,
of this information to transmit it as eciently as possible, the information also has to be transmitted between location
that is requiring only few update messages, while still be- servers. To control the transmission of location informa-
ing e ective in returning the location information with the tion, di erent update protocols with varying properties can
desired accuracy. Di erent classes of such update protocols be used. In case of a querying protocol the information is
are described in this paper and a new combined protocol pulled by the receiver, while with a reporting protocol it is
is proposed. To be able to compare their e ectiveness and pushed by the sender. A combined protocol is also possible,
eciency, we present an analysis for the minimum and av- where an optimal ratio between the number of updates and
erage resulting accuracy of the location information on the the number of queries has to be found.
receiver and the number of messages transmitted between In this paper we will discuss the characteristics of these
them. We also present some simulation results, which we classes of update protocols and their subclasses as well as
have performed to back up our analysis. their strengths and weaknesses according to di erent areas
of application. To be able to guarantee the receiver a cer-
1 Introduction tain accuracy of the returned location information, it usually
has to be transmitted rather frequently. If the location in-
As detailed information about the location of a mobile de- formation is transmitted from a mobile device to a location
vice or user has become widely available, mainly through server, a wireless channel has to be used, where bandwidth
the satellite positioning system GPS, more and more appli- is low and expensive. It is therefore important to use an
cations are using this information. Examples are car naviga- update protocol that works eciently, that is requires as
tion or eet management systems, as well as location-aware few messages as possible, and e ectively, that is achieves a
information services for cellular phones (which today use the desired accuracy of the location information on the server.
less accurate information of the communication cell a mobile In this paper we discuss the eciency of the basic types of
phone is currently located in). Most of these applications update protocols by means of an analysis of the number of
only consider the location of a single user. Further function- transmitted messages and their e ectiveness by analyzing
ality, like determining all mobile objects inside a given area the resulting minimum and average accuracy of the location
or generating an event whenever a mobile object enters a information at the receiver. Although this work has been
room, requires a special location service, which collects and performed in the context of updating the location informa-
manages the location information for all of these objects. A tion on a location service, its results are applicable wherever
universal global location service has been proposed for ex- location information is transmitted from a sender to a re-
ample by [Leo98] and [Maa97]. Such a location service has to ceiver.
deal with all sorts of mobile objects with various movement The remainder of this paper is structured as follows: In
characteristics, for example objects that move continuously Section 2 we look at related work and in Section 3 we de-
for a longer period of time, like cars and trucks, or objects scribe the background for this paper as well as its technical
that only move seldomly, like pieces of oce equipment, for environment. The di erent classes of update protocols and
1their properties are discussed in Section 4, while Section 5, In the DOMINO project a database for the tracking of
besides de ning a data-model for the location information mobile objects is being developed (see [WSCY99]). One in-
and its accuracy, compares their eciency and e ectiveness tended area of application is eet management for the trucks
by means of an analysis. In Section 6 we present some sim- of a transportation company. To reduce the number of up-
ulation results, to support the outcome of our analysis. Fi- dates, it is assumed that the route, on which the mobile
nally, Section 7 contains our conclusion, as well as the plans object is traveling, is known to the database in advance and
for future work. that the object informs the database when it changes its
route. Di erent dead-reckoning strategies are proposed and
2 Related Work compared, where the database estimates the current loca-
tion of a mobile object on this route based on its speed
Architectures for a location service have been discussed in and the object sends an update of its location when it dif-
the area of location-aware applications as an important com- fers from this estimation by more than a certain threshold.
ponent of such systems. However, di erent update proto- The di erent strategies have di erent ways for determining
cols for the transmission of the location information have this threshold or for adapting it dynamically. These dead-
not been compared in detail. Early location services were reckoning protocols have been designed on the assumption
usually developed for a particular positioning system, like that the route of the mobile objects is known beforehand. In
the location service for the Active Badge system, which is this paper we examine update protocols from a more general
described in [HH94]. For a similar positioning system, the point of view, where we assume no knowledge of the mobile
ParcTab system developed at Xerox Parc, a location ser- objects' future movements.
vice has been created, where the location information of
a mobile object or user is protected by a dedicated Home 3 Background
Agent, which controls access to it [ST94]. In this context
the problem of disseminating the location information to a This section gives an overview of the technical environment
large number of clients has been discussed in [ST94]. Clients our work is based on, namely the sensor systems the location
with similar queries receive the location information over dy- information is acquired from and the network environment
namically created multicast groups in which the responses it is transmitted over. Finally, we describe the architecture
to these queries are grouped. In his PhD-thesis, Leonhardt for a universal distributed location service, which is being
([Leo98]) proposes a universal location service, which is in- developed at our Institute and where we plan to apply the
dependent from the types of applications accessing it and the results of this work.
types of positioning systems it gets the location information
from. A detailed location model is presented that integrates 3.1 Positioning Sensors
di erent types of location information. Another main con-
cern of this work is privacy and security. For this purpose it The location information for a mobile object can be deter-
de nes requirements and policies for access control of a loca- mined through various types of positioning systems. A basic
tion service. The thesis also contains some thoughts about distinction can be made between tracking systems, where a
the design of a global, general-purpose location service but system of stationary sensors determines the location of a
does not propose or evaluate a speci c architecture. mobile object, and positioning systems, where the location
The management of the location information of their mo- information is determined by a sensor on the mobile object
bile phones is a very important issue in the area of mobile itself. A typical tracking-system is the Active Badge system
communication networks. When a call has to be forwarded (see [WHFG92]), where an Active Badge carried by a user
to a mobile phone, a mobile communication network sends or attached to an oce device periodically emits an infrared
a paging message to all the cells the mobile phone may be beacon, which is detected by an infrared sensor placed in
in, whereupon the corresponding mobile phone answers to each room of a building. The widely used global positioning
accept the call. The mobile phone on the other hand pe- system (GPS) is a positioning system, where a sensor deter-
riodically reports its current cell, which is updated in the mines its own position by taking a bearing on four of a whole
Visitor Location Register and Home Location Register. Var- of twenty-four special satellites (see [HWLC97]). Di erent
ious update strategies have been discussed with the goal of types of positioning systems return the location informa-
minimizing the overall number of paging and update mes- tion with varying formats and degrees of accuracy. It can
sages. In [BNKS95] a distance-based, a movement-based be symbolic (i.e., the identi er of a region, like a room or
and a time-based protocol are compared. In this special communication cell) or geometric, where it is described by a
application area the location information is a discrete iden- global geodetic coordinate system like WGS84 (see [IA97]).
ti er, describing a certain cell of the communication net- The classi cations in this paragraph have been taken from
work. Today, these cells have a size of about 1 to 10 miles [Leo98].
but are expected to become smaller with the introduction Because no positioning system o ers a global coverage
of future technologies. Update policies for location manage- (e.g., GPS works only outdoors) a universal location service
ment have been optimized for these special requirements. In has to be able to integrate the location information acquired
[BD99] the LeZi-update approach is described, which uses by all types of positioning systems.
the cell names as an alphabet for minimizing the updates
by an mechanism similar to the Lempel-Ziv compression. In 3.2 Network Environment
our work we have assumed that the location information is
much more accurate, acquired for example by a GPS sensor, In our work, we have assumed the following network environ-
and that the location information can have di erent levels ment: Location servers and stationary clients, which query
of accuracy. The location service, these update protocols the location information, communicate over a xed network.
are intended to be used for, also allows di erent types of Mobile devices need to be connected to this network by a
queries (e.g., range queries), which are not supported by the wireless link. They have to be able to communicate and to
location management components of mobile communication be contacted independently from their geographical location
networks. (e.g., using a mechanism like Mobile IP [Pe96]), because the
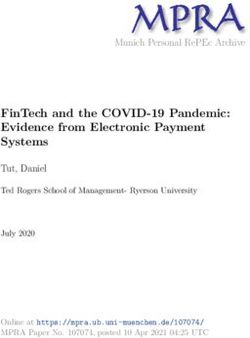
2device has to transmit location information to a server via We have proposed an architecture for such a location
the wireless link or is queried by the location server through service, which is shown in Figure 1. Its components and
it, if the information is determined locally. Mobile devices their functionality are described next:
may also act as a client of the location service by posting Clients and sensor systems: Clients of the location ser-
queries over the wireless link. The wireless network can ei- vice are location-aware applications, which run either
ther be a wireless WAN, like GSM [MP92], a MAN, like the on a mobile or on a stationary computer and query the
Metricom Ricochet network, or a LAN, for example accord- location servers using the interface mentioned earlier
ing to the IEEE 802.11 standard [Com97]. in this subsection. A client on a mobile device is usu-
A common characteristic of these wireless networks is ally also equipped with a positioning sensor or is being
that a connection can be temporarily lost while the device is tracked by one. Sensor systems, which, depending on
at an unfavorable location (e.g., inside of a tunnel), a state their type, determine the location information for one
which is called a disconnection. In most cases a wireless or more mobile objects, are associated with a certain
network can also not o er as good a bandwidth and latency location server and update the location information for
as a xed networks (see [Sat96]). these objects.
3.3 A Universal Location Service Location server: Each location server is responsible
for a certain geographical area and stores the location
This comparison of update protocols has been done as part information for all mobile objects that are currently
of our e orts to design and develop a universal distributed inside of this area. If a mobile object leaves the area,
location service (see [LK99]). As mentioned before, this ser- a hand-over has to be performed with the server, into
vice will have to collect and integrate the location infor- whose area the object has moved. A location server
mation from various sensor systems. Furthermore, it will answers the clients' queries concerning the mobile ob-
provide a general interface through which di erent types of jects it is responsible for and forwards other queries to
applications can access the location information in a general the appropriate server(s). This is done by accessing
way. For reasons of scalability and to achieve short response one of the two following registers:
times as well as high update rates, the information will be
distributed between a number of location servers. Object register: The data, which belongs to a single
The location service shall provide the following function- mobile object, is stored in the object register. It can
ality: It will support range queries, that is nding all mobile contain general information about the object or infor-
objects inside a given area, as well as position queries, which mation that is determined by the location service, like
request the current location of a certain mobile object. A the maximum speed of the object. The object regis-
more specialized query is, for example, the search for the ter also stores the addresses of the location servers the
nearest object to a certain location. It is intended, that the location information for this object is currently stored
location service will additionally support an event mecha- on. It can easily be distributed, so that each register
nism, where the client can de ne a certain predicate and server is responsible for a certain set of objects.
is noti ed by the service whenever this predicate becomes Location register: The location register stores the as-
true. A client program may for example be noti ed, when- sociation between the location servers and the area
ever a mobile object enters or leaves a given area or when they are responsible for. It is used to nd the appro-
a mobile object meets another one, that is comes within a priate location servers for a range query. If necessary,
certain distance from it. the location register can be distributed across di erent
servers, which are organized in a tree structure similar
to the Domain Name System (DNS) of the Internet.
Because of privacy concerns, security and access control for
client sensor such a location service are very important issues. A user
programs systems
should be able to control in detail who and to what degree
has access to his location information. Some solutions for
results, queries, object this problem have been presented in [Leo98]. In this paper
notifications events sightings
we do not discuss privacy any further, but will address the
issue in future work.
location
service API 4 Update Protocols
location
server
In this section the di erent classes of update protocols are
introduced and their main properties are discussed. The
lookups lookups protocols are used to update a remote secondary copy of the
location information for a certain mobile object based on
the contents of a primary copy. The goal is to guarantee a
updates updates given accuracy of the location information in the secondary
copy. The information of the primary copy is either deter-
location object mined directly by a positioning system or is the information
register register
stored on another location server. We call the component
which manages the primary copy the source of the location
information. The secondary copy is usually stored on a spe-
cial or general location server, which is queried by local or
Figure 1: Main components of a universal distributed loca- remote applications. Figure 2 shows the components which
tion service are involved in the transmission of the location information.
3time of the server is also comparatively large, as the server
source/
primary
server/
secondary has to contact the source for each query. On the other hand,
copy copy this protocol has to be used, if because of privacy concerns
sensor the user does not allow his/her location information to be
system mobile update
protocol
location
queries
application
stored on any location server other than on his/her personal
device or
location
server
device. In this case, the personal device has to be accessed
server
fixed for each query to check for access rights. An example for
network or this is the location service presented in [ST93], where a spe-
mobile
communication cial program, a so-called User Agent, stores and protects
the location information of a certain user. Here, we use this
protocol mainly for comparison.
Figure 2: Components involved in the updating of location Cached: The cached querying protocol is an optimization of
information. the simple protocol, where the server stores a cached copy
of the last transmitted location information. When the lo-
4.1 Classi cation cation information for this mobile object is queried by an
application, the server estimates the accuracy of the cached
The update protocols can be divided into three main classes, copy and returns it, if it is considered to be accurate enough.
namely querying, reporting and combined protocols, where Otherwise, the server has to send a request to the source like
each class has a number of typical variants. Each of these in the simple protocol. A pessimistic cached querying pro-
protocols has its characteristic properties and is suitable for tocol uses the distance, a mobile object may have traveled
a given environment or for certain requirements. Some of at its maximum speed, for the estimation of the accuracy.
the reporting protocols are similar to the paging/update If the maximum speed of the mobile object is much higher
schemes that are used for Location Management in the re- than its average speed, the cached copy is often unnecessar-
search area of Personal Communication Service (PCS) net- ily considered not accurate enough. An optimistic cached
works and are summarized, for example, in [BNKS95]. The querying approach could use the average speed of the mo-
classes of update protocols and their relationships are shown bile object instead of the maximum one. However, with any
in more detail in Figure 3. optimistic estimation for the accuracy of the location infor-
mation, the actual location of the mobile object can in the
worst case di er from the reported location by more than
the requested accuracy. With a cached querying protocol
update protocols the response time of the server is varying and depends on
whether the server can use the cached copy or has to contact
the source.
reporting Periodic: If the server queries the location information peri-
odically from the source with a certain time interval D, the
querying combined
protocol is called a periodic querying protocol. Although
here the initiative is reversed, this protocol has the same
simple caching periodic simple distance- time- dead- properties as the time-based variant of the reporting proto-
based based reckoning
cols described next.
Figure 3: Classi cation of update protocols for the trans- 4.1.2 Reporting Protocols
mission of location information. In case of a reporting protocol the initiative is on the side of
the source. It remembers which location information it has
sent last to the server and therefore knows which location
4.1.1 Querying Protocols is stored there. An update of the location information is
A protocol is called a querying protocol, if the server decides sent, whenever a comparison to the current position of the
when to request the location information from the source. mobile object exceeds a certain distance or time threshold.
In this case, the source can be very simple, as it does not The server can therefore conclude the maximum uncertainty
need to keep extensive information about its state or realize of its copy from the value of this threshold. With an un-
a complicated logic. This may be important for small mo- modi ed reporting protocol the server always answers the
bile devices. The simple and the cached querying protocols queries of the applications by directly returning the infor-
transmit the location information on-demand, that is only mation currently stored in its copy. It can therefore only
when it is queried by an application. If the location infor- return the location information with an accuracy speci ed
mation is queried only seldomly, these protocols are more by the value of the threshold, even if a more accurate in-
ecient than the reporting protocols described in 4.1.2, be- formation is queried by an application. The response time
cause the information is not transmitted unnecessarily (see of the server on the other hand is shorter, as it does not
Section 5). have to contact the source. A reporting protocol is usually
more ecient for a given maximum accuracy than a query-
Simple: In the most simple form the server requests the lo- ing protocol, if the location information is queried often (see
cation information from the source each time it is queried Section 5) or if the server has to check periodically for the
by an application and therefore does not need a secondary occurrence of events.
copy at all. This leads to the highest possible accuracy of Simple: The most simple reporting protocol sends the lo-
the location information, but also to a large number of mes- cation information each time the value of the primary copy
sages, if the information is queried very often. The response
4Message rate is Message Upper bound Allows applica- Can detect dis-
adjusted to mo- rate is adjusted to for spatial uncer- tions to specify a connections.
bility of object. query rate and re- tainty of returned desired accuracy.
quested accuracy. information.
querying:
simple ()
cached ()
periodic
reporting:
simple () ()
time-based
distance-based
dead reckoning
combined ()
Table 1: Summary of properties for di erent update protocols.
changes, for example because a sensor system has deter- 4.1.3 Combined Protocol
mined a new location sighting. In this case the number of While a plain querying protocol can not be adjusted to dif-
messages depends on the update rate of the sensor system ferent mobility characteristics of the mobile objects, a re-
and can be rather high. Depending on the type of sensor porting protocol does not consider the query rate and the
system, the simple reporting protocol also falls into one of accuracy requested by the applications. With a combined
the two following categories. We therefore do not consider protocol, which integrates the distance-based reporting pro-
it any further. tocol and the cached querying protocol, both of these fea-
Time-based: With a time-based protocol the location infor- tures can be achieved. Similar to the distance-based report-
mation is transmitted periodically, after a certain interval of ing protocol, the source may update a secondary copy on
time T has elapsed. The update rate is xed and does not the server to achieve a given spatial accuracy D. If the
depend on the behavior of the mobile object, which guaran- location information stored in the secondary copy is not ac-
tees a certain temporal but not a spatial uncertainty of the curate enough for a certain query, the server requests the
information. If the object moves slowly or not at all, there is information from the source as in a querying protocol. To
little or no di erence in the location information transmit- minimize the total number of messages consisting of updates
ted by the messages to the server. If the object moves fast, and queries, it has to be decided whether to update a sec-
not enough messages are sent to achieve a high accuracy. ondary copy at all and what distance threshold D has to
be used, depending on the mobility properties of the mobile
Distance-based: The distance-based protocol sends an up-
object and on the queries by the applications (see Section
date of the location information whenever the geographic 5). If the source monitors the mobility properties and the
distance between the current location of the mobile object server those of the queries, they can adapt the properties of
and the last reported location becomes greater than a given the protocol dynamically by increasing/decreasing the dis-
threshold D. As this protocol sends more messages if the tance threshold D or by starting/stopping the updating of
mobile object is moving fast and less messages if it is slower the secondary copy altogether. With the combined protocol,
or stationary, it is often more ecient for objects that per- the response time is again varying and depends on whether
form sporadic movements between periods of immobility. the secondary copy on the server is accurate enough or if
This is, for example, typical for users in an oce environ- the server has to contact the source.
ment or for all sorts of oce equipment. It is also possible
to integrate the time-based and the distance-based protocol 4.2 Behavior in Case of Disconnection
to combine their properties. A problem that frequently occurs with mobile devices and
wireless data transmission is a temporal disconnection of the
Dead-reckoning: Dead-reckoning is an optimization of the communication link. A protocol which is intended to trans-
distance-based protocol. Here, the server estimates the cur- mit location information from a mobile device to a server
rent location of the mobile object based on its old location, via a wireless communication link has therefore to be able
its speed and the direction of its movement or on informa- to deal with such disconnections. In the following para-
tion about the route of the object. The source also calculates graphs we discuss the properties of the basic protocols with
this estimated location and sends an update when it di ers regard to disconnections, namely how long it takes to detect
from the actual location by more than a certain distance a disconnection and the maximum uncertainty of the loca-
threshold. A dead-reckoning approach performs very well, tion information returned during that time. If the server has
if the object is moving with constant speed in a given di- detected a disconnection it can, according to the preferences
rection for some time or if the route of the mobile object of its users, either return an error message when queried for
is known in advance. In the second case the update costs the location information or return the last known position
can, according to [WSCY99], be reduced by 85% compared together with an indication that it is obsolete. Where neces-
to other reporting protocols. sary we sketch appropriate modi cations to these protocols
that enable them to deal with disconnections.
Querying protocols: In case of a querying protocol, the dis-
connection is detected as soon as the server receives a query
5and requests the location information from the source (and, these protocols, based on the results of the analysis. Only
in case of a cached querying protocol, also can not answer the updates and queries for the location information of a
the query from its cached copy). Therefore, the server does single mobile object are considered, as the results can be
not at any time return less accurate information than in the easily applied to several objects. For reasons of simplicity
normal case. we also do not consider the delays for the transmission of
the messages, which would lead to a further (temporal) un-
Time-based reporting protocol: When using a time-based certainty of the location information. Because it is added
protocol a disconnection can be detected if no update mes- uniformly to all messages, the delay does not substantially
sages have arrived after the time threshold T has elapsed a ect the comparison of the protocols.
since the last update. Again the server only returns loca- The eciency of an update protocol is here considered
tion information with the speci ed accuracy. to be the average number of messages m that is transmitted
per second between the source and the server. Messages can
Distance-based reporting protocol: With the basic distance- be location updates generated by the source as well as loca-
based protocol the server is not able to detect a disconnec- tion requests from the server. The accuracy of the location
tion. Instead, it assumes that the mobile object has not information on the server, which describes the e ectiveness
moved by more than the distance threshold D and returns of a protocol, is de ned by the maximum and average de-
the old location information as being up-to-date. To be able viation between the information returned as a result of a
to detect disconnections, the distance-based protocol can be query and the actual position of the mobile object. Up to
combined with a time-based one, by having it sent a location now, we have assumed that applications are only interested
update at least every time interval Tmax . A suitable value in the maximum uncertainty of the location information, for
for Tmax has to be found by considering the message over- example if they want to be able to determine which room of
head versus the maximum uncertainty, the user is willing to a building a certain user is in. However, other types of appli-
tolerate in case of an error. cations may be more concerned with the average accuracy
of the information. An example for this could be a map,
Dead-reckoning reporting protocol: A basic dead-reckoning where the current locations of a number of mobile objects is
protocol has the same problems with disconnections as the shown. In our analysis we have therefore considered both,
distance-based protocol and the same mechanism can be the maximum and the average accuracy, dmax and davg .
used to deal with them. In [WSCY99] another technique The calculations for m, dmax and davg are based on
for detecting disconnections has been introduced, were the the behavior of the mobile object, de ned by its average
distance threshold D is being continuously decreased until and maximum speed, vavg and vmax , and on the uncer-
the source is forced to send an update message or it has be- tainty up with which the location information is available
come increasingly likely that a disconnection has occurred. at the source. Moreover, the calculations depend on how
frequently and to what accuracy the location information is
Combined protocol: How the combined protocol reacts to queried by the applications, which is described by the av-
disconnections depends on how accurate a secondary copy erage number of queries per second q and the average of
is kept on the server. A disconnection is detected as soon as the requested uncertainty uq . The calculations are also af-
the server has to request the location information from the fected by characteristic parameters of the di erent protocols,
source. If this is not the case, the combined protocol behaves namely the maximum uncertainty required of the secondary
like the distance-based protocol and can return inaccurate copy us , the speed that is assumed for the mobile object by
location information. Again, a maximum time interval Tmax the cached querying protocol vasd, and the time threshold T
between update messages should be speci ed. for a time-based or the distance threshold D for a distance-
based reporting protocol. Table 2 shows a summary of these
A summary of the properties for the di erent update variables.
protocols discussed in this section is contained in Table 1. Some important restrictions between these variables are
It shows, whether the message rate of a protocol depends as follows: Because the information transmitted to the server
on the mobility characteristics of the mobile objects and can not be more accurate than the information of the source,
whether it depends on the queries of the applications. It the uncertainty of the secondary copy is always equal to or
also indicates, whether the protocol can guarantee an upper greater than the uncertainty of the primary copy, us up .
bound for the returned location information and if it allows Also, it is not practical for an application to request more
the applications to request a certain accuracy of the infor- accurate location information than the one available at the
mation. The nal column shows, whether the protocol is source. Hence, we also assume that uq up . For the calcu-
able to deal with disconnections. lation of the average deviation we assume that the average
uncertainty of the location information on the source is half
of the maximum uncertainty. This may not be true for all
5 Analytical Comparison of the Protocols sensor-systems (e.g., the average uncertainty is less than half
of the maximum if the source is a GPS sensor), but does not
In this section, the e ectiveness and eciency of the update have much in uence on the outcome of the analysis. The re-
protocols are compared in more detail, by means of an analy- strictions described here apply to all formulas in this section
sis. First, the variables that appear in the following analysis and are not explicitly stated again.
are described and a general data model for the location in-
formation and its accuracy is de ned. The analysis considers 5.1 Location and Uncertainty Model
the number of messages required for updating the location
information on the server as opposed to the minimum and For the following analysis we use a uniform model of the
average accuracy of the location information returned to an location information returned by the di erent positioning
application. Corresponding formulas are shown rst for the systems and of its accuracy.
querying and reporting protocols, then for a combined pro- The location information is supposed to be given by
tocol. Finally, we discuss the characteristic properties of global geodetic coordinates, for example of the WGS84 stan-
6vmax Maximum speed of mobile object. u(t)
vavg Average speed of mobile object.
q Average number of times per sec-
ond, the location information of the vmax (t - tl)
mobile object is queried.
uq Average of requested accuracy for up
this location information.
uq Accuracy requested in one certain up
query.
up Uncertainty of primary copy.
Tp Update interval of primary copy.
tl Time at which a certain location location sighting
sighting l has been acquired. uncertainty
us Uncertainty of secondary copy.
vasd Speed that is assumed for estimat-
ing the accuracy of the location Figure 4: Uncertainty of location information depending on
information. the accuracy of the sensor system and the elapsed time.
T Time threshold of the time-based
reporting protocol.
D Distance threshold of the distance- of a person to 36 km/h. By evaluating the history of the
based reporting protocol. location sightings of a mobile object, it is also possible to
m Average number of messages trans- determine a maximum velocity separately for each object.
mitted per second between source In many cases, however, the location sighting will be
and server. more accurate than the uncertainty given by this equation,
dmax Maximum deviation between the lo- as the mobile object will not be moving at its maximum
cation information the server re- speed or not in a straight line. A person in an oce will usu-
turns as result of a query and the ally remain relatively stationary at a certain location (e.g.,
actual position of the mobile object. his oce or a conference room) for a longer interval of time,
davg Average deviation. while moving at a comparatively high speed between these
locations. If the uncertainty does not need to be limited by
an upper bound or the maximum velocity is not known, an
Table 2: Variables used in the analysis. assumed velocity vasd (e.g., the average velocity vavg of the
mobile object) can be used to predict the uncertainty instead
of the maximum velocity vmax . In some cases this will lead
dard, where the distance between two locations can easily to an actual deviation, which is greater than the predicted
be calculated. Symbolic location information (e.g., the name one. This error will be worse for the sporadic movement of a
of a room) returned by some of the positioning systems can person in an oce, compared to the more steady movement
easily be converted to geometric coordinates. The geomet- of a traveling car.
ric coordinate for a region described by a certain symbolic
name is given by the center of the region, while the spatial 5.2 Basic Protocols
accuracy is the distance from the center to the farthest point
in the region. The equations for an approximate calculation of the number
A location sighting can have a temporal as well as a of transmitted messages as well as for the maximum and av-
spatial accuracy. The temporal accuracy is given by the erage uncertainty of the location information are shown next
time that has elapsed since the location sighting has been for the basic querying and reporting protocols. We have
acquired, while the spatial accuracy is de ned by the max- not yet performed the analysis for the dead-reckoning pro-
imum distance between the position reported by the sight- tocol, because it depends to a great extent on the movement
ing and the actual position of the mobile object. For many characteristics of the mobile object and we did not want to
location-aware applications the spatial accuracy of a sighting assume prior knowledge about the route of the object. In
is more important, because the applications are concerned general the dead-reckoning protocol can be expected to be-
with the spatial relationship between (mobile) objects. The have similar to the distance-based reporting protocol.
uncertainty ul (t) of a certain location sighting l describes
the spatial accuracy at a given time t tl . Simple querying protocol: In the simple querying protocol,
At the time of the sighting the uncertainty is determined which is presented here only for reasons of comparison, the
by the accuracy up of the sensor system. The uncertainty at number of exchanged messages is equal to the number of
a later time t can be estimated by the distance the mobile queries as every query is forwarded to the source.
object may have traveled during the time t ; tl . If a maxi-
mum bound for the velocity of the mobile object (vmax ) ex- m=q (2)
ists, the maximum uncertainty of the location sighting can
be calculated by adding the distance the object can have If we do not consider the communication delay, the loca-
traveled to the uncertainty of the sensor system (see Figure tion information presented to the applications has the same
4). This is described by the following equation: accuracy as the location information of the source.
ul (t) = up + vmax (t ; tl ) (1) dmax = up (3)
u
davg = 2 p (4)
For example, the maximum velocity of a car can be set to
300 km/h (to be on the safe side) and the maximum velocity
7Distance-based reporting protocol: The number of messages
Cached querying protocol: The cached querying protocol transmitted with the distance-based protocol is also inde-
uses Formula 1 to estimate the uncertainty of the location pendent of the number of queries. To guarantee a given
information stored on the server and if accurate enough re- uncertainty us of the location information on the server, the
turns it without contacting the source. For the speed of the distance threshold D is set to us ; up . The average num-
mobile object used in this formula it can take a pessimistic ber of messages per second can then be calculated by the
approach with vmax (as shown in Formula 1), or an opti- time interval that the mobile object requires to cover this
mistic approach with vavg instead of vmax . In the following distance at average speed.
considerations we represent the assumed speed of the mobile
object by vasd, which is then replaced by the speed used in m = u v;
avg
u (11)
a concrete version of the protocol. Compared to the sim- s p
ple protocol, the caching approach eliminates all messages If no messages are lost due to problems with the network
where the query falls into the period of time in which the connection (compare Section 4), the distance-based proto-
cached copy of the location information is considered accu- col achieves the requested maximum uncertainty us for the
rate enough, t = (uq ; up )=vasd (derived from Formula 1). secondary copy on the server. On average the uncertainty
The number of messages transmitted between source and is half of it.
server is therefore the total number of queries, multiplied
by the fraction of queries that can not be answered from the dmax = us (12)
cache, which is approximately 1=(q(uq ; up )=vasd + 1). davg = u2s (13)
m= q (5)
;up + 1
q uvqasd 5.3 Combined Protocol
The maximum uncertainty of the returned location informa- The combined protocol comprises elements of the distance-
tion is given by the time t the cached copy is considered based reporting protocol and the pessimistic cached query-
accurate, multiplied with the maximum speed of the mo- ing protocol, described in the previously. Therefore, it also
bile object. To this the initial uncertainty of the location combines elements of their behavior. The transmitted mes-
information of the primary copy has to be added. The av- sages are the updates sent to keep the secondary copy up-
erage uncertainty can be approximated by the uncertainty to-date as well as the requests for the location information
of the sensor system, if the location information has to be on the source sent by the server, if the secondary copy is
requested from the source. Otherwise, the average uncer- not accurate enough. The number of updates can be cal-
tainty is half the distance that the mobile object can have culated similar to the number of messages in the distance-
traveled at average speed during the time in which a cached based reporting protocol. The number of requests is the
copy is considered valid. The corresponding Formula 7 is number of messages in the cached querying protocol, where
shown in a simpli ed form. the query rate is reduced by the probability that the un-
certainty demanded in a query is lower than the accuracy
dmax = uqv; up vmax + up (6) of the location information already stored in the secondary
copy, P (uq < us). The probability distribution depends
asd
uq ;up vavg on how the location information is queried and used by the
davg = vasd up applications.
vasd + 1 + 2 (7)
2
(uq ;up )q
m = u vavg + P (uq < us ) q (14)
If the assumed speed vasd of the mobile object is set to its ;up + 1
s ; up P (uq < us ) q uvqmax
maximum speed vmax , the uncertainty of the location infor-
mation presented to the querying application is limited by Because the combined protocol queries the source whenever
uq (substituting the variables in Formula 6). The protocol the location information stored in the server is less accurate
can therefore in this case guarantee the accuracy requested than the accuracy demanded in a query, it can always return
by the applications. the desired accuracy similar to a cached querying protocol.
The maximum uncertainty returned is therefore the uncer-
Time-based reporting protocol: As the time-based protocol tainty demanded in the queries. The average uncertainty is
sends a location update periodically, the number of messages again a combination of the average accuracy of the reporting
depends only on the time threshold T . To achieve a given protocol, in case the accuracy requested in a query can be
uncertainty us for the secondary copy, T has to be set to the met by the secondary copy, and of the average accuracy of
time, the mobile object needs to cover the distance given by the querying protocol, otherwise.
us minus the uncertainty of the primary copy at maximum
speed, T = (us ; up )=vmax . dmax = uq (15)
m= 1 T (8) davg = P (uq us ) u2s +
The maximum deviation can be calculated by adding the uq ;up vavg !
distance that the object may have traveled during time T P (u < us ) vmax u p
vmax + 1 + 2 (16)
2
q
to the uncertainty of the location information at the source. (uq ;up )q
For the average deviation the average speed is used, instead
of the maximum one. The behavior of the combined protocol can be controlled
through the uncertainty of the secondary copy. If it is set to
dmax = T vmax + up (9) a low value, the protocol behaves like the distance-based re-
T v avg u p porting protocol, if it is set to in nity, the combined protocol
davg = 2 + 2 (10) can be made to behave like a cached querying protocol.
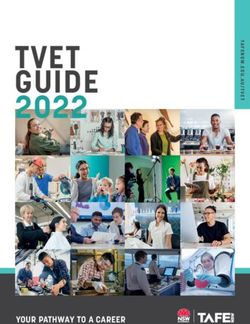
85.4 Discussion The other aspect of the update protocols, which is dis-
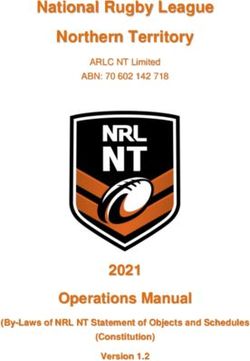
To compare the properties of the protocols, we rst look cussed in this paper, is their e ectiveness, that is to what
at their eciency, that is the number of messages that are degree the server can ful ll the accuracy demanded in a
transmitted between source and server. These are shown in query. The maximum and average uncertainty (dmax and
Figure 5 for the querying and reporting protocols depending davg ) of the location information returned by the server is
on the number of queries per second. For the other param- shown separately for the two cached querying and the two
eters we have assumed values taken from GPS traces that reporting protocols in Figure 6. The uncertainty is shown
we have obtained from a Di erential GPS sensor during a depending on the speed ratio between the average and the
car ride and which are described in more detail in the next maximum speed of the mobile object (vavg =vmax ), which
section. The average and maximum speed for the mobile gives a good indication of its mobility characteristics. A
object is vavg = 12 m/s and vmax = 40 m/s. The uncer- mobile object with a low ratio moves sporadic, an object
tainty of the primary copy up is that of the sensor system with a ratio approaching 1 moves steadily. For the graphs
and is set to 5 m. For the queries we have assumed a xed we have assumed a query rate q of 0:1 queries per second.
demanded uncertainty of uq = 100 m. The pessimistic cached querying approach can meet the
required accuracy independently from the mobility of the
object. For a low speed ratio it also has a very low average
uncertainty. In comparison, the optimistic cached querying
protocol, which is much more ecient, results in an almost
100 simple querying
pessimistic cached querying
optimistic cached querying
constant average uncertainty, a little below the uncertainty
requested by the client. However, for a low speed ratio the
time-based reporting
10 distance-based reporting
maximum uncertainty can be much higher than the one de-
messages per second
manded by the client. This protocol is therefore not suitable
1
for objects with sporadic movement, if the querying appli-
cation can not tolerate variations in the uncertainty.
Both reporting protocols can meet a xed uncertainty
0.1
demanded by the client. The time-based protocol has a low
average uncertainty for a small speed ratio, compared to
0.01 the distance-based protocol, which o ers a constant average
uncertainty for all types of mobile objects. As the former
requires more messages, the later is to be preferred. The
0.001 reporting protocols, however, can only return the location
0.001 0.01 0.1 1 10
information with the accuracy currently stored on the server.
They can not meet the demand of applications which query
queries per second
Figure 5: Analytical results: A comparison of the number the information with a lower requested accuracy, uq < us .
of messages transmitted with the querying and reporting From the viewpoint of their e ectiveness, the distance-
protocols for a given query rate. based reporting protocol is equal to the cached querying
protocol if only a xed requested accuracy is considered (al-
Generally, a distance-based reporting protocol performs though, the later has a better average uncertainty, especially
better than the time-based one and the optimistic cached for a low speed rate). The reporting protocols are not suit-
querying protocol better than the pessimistic one. While able, if the location server allows the client to exibly specify
the properties of the reporting protocols are independent the requested accuracy and it is important to meet these re-
from the query rate, the number of messages increases with quirements.
a querying protocol with the number of queries. If the query As mentioned before, the performance of the combined
rate is low, a querying protocol is therefore better than a re- protocol depends on the uncertainty with which the sec-
porting protocol. For very low query rates a simple protocol ondary copy is updated as well as on the query rate. In
is sucient. If the query rate is higher, the distance-based Figure 7, the number of transmitted messages is shown for
reporting protocol requires fewer messages than the pes- the combined protocol depending on the uncertainty of the
simistic cached querying protocol, which is in many cases to secondary copy and the query rate. For the uncertainty de-
be preferred to the optimistic protocol as it can guarantee a manded in the queries we have assumed a Gaussian distri-
maximum uncertainty of the returned location information. bution with an expected value of uq = 100 m and a standard
The query rate at which the performance of the reporting deviation of 20 m. All other parameters have the same val-
protocol becomes better than that of the querying protocol ues as before.
is given by the following inequation: Figure 7 indicates an optimal value for the uncertainty
of the secondary copy for higher query rates, whereas for
1 lower query rates the number of messages is lowest, if the
q> us ;up (17)
;up uncertainty is set to in nity. It is therefore possible to use
vavg ; uvqmax Formula 14 to decide, whether it is useful to update a sec-
ondary copy at all and to nd an optimal uncertainty value
If vavg is low compared to vmax , which is the case for for it. The uncertainty value can either be calculated with
mobile objects with sporadic movements, the limit for the the necessary parameters set to the average values deter-
query rate in Formula 17 approaches 0. For such objects, mined for a certain environment, the protocol is going to
the distance-based reporting protocol is always better than be used in. Or it can be adjusted dynamically according to
the cached querying one. If vavg approaches vmax , the limit changes in the environment.
for the query rate approaches in nity. In this case, the For comparison with the other protocols, Figure 8 shows
cached querying protocol always performs better. However, the number of messages transmitted with the combined pro-
the number of messages for high query rates is only a little tocol depending on the query rate. Optimal values for the
higher with the reporting than with the querying protocol. uncertainty of the secondary copy have been taken from Fig-
9pessimistic cached querying optimistic cached querying
uncertainty of returned location information in meters
uncertainty of returned location information in meters
maximum uncertainty maximum uncertainty
average uncertainty average uncertainty
1000 1000
100 100
10 10
1 1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
ratio between average and maximum speed of mobile object ratio between average and maximum speed of mobile object
time-based reporting distance-based reporting
uncertainty of returned location information in meters
uncertainty of returned location information in meters
maximum uncertainty maximum uncertainty
average uncertainty average uncertainty
1000 1000
100 100
10 10
1 1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
ratio between average and maximum speed of mobile object ratio between average and maximum speed of mobile object
Figure 6: Analytical results: Maximum and average uncertainty of the location information on the server for the optimistic
and pessimistic cached querying protocols and the time-based and distance-based reporting protocols.
ure 7. and a location service with a secondary copy for the loca-
The combined protocol integrates the positive features tion information of one mobile object. The information on
of the more simple querying and reporting protocols. Al- the source is updated from the GPS trace, while the server
though, for a higher query rate it is less ecient than the receives randomly created location queries with an exponen-
distance-based reporting protocol, it requires much less mes- tially distributed time interval and a xed or, in case of the
sages for a low query rate, similar to the querying protocols. combined protocol, a Gaussian distributed accuracy. The
Unlike the reporting protocols, it is also able to meet an ar- mean value for the exponential distribution of the time in-
bitrary requested accuracy. Its disadvantages are that it is terval between queries is the inverse of the query rate q.
more complicated to implement, because an optimal value The xed accuracy requested in the queries is 100 m for the
for the uncertainty of the secondary has to be found, and basic protocols. The Gaussian distributed accuracy for the
that communication errors are more dicult to handle. combined protocol has a mean value of 100 m and a stan-
In summary, the combined protocol is suitable for most dard deviation of 20 m. Into this simulation environment
cases, especially if a protocol is needed that performs equally di erent update protocols can be inserted that specify, how
well in di erent environments or even can adapt to them. Of the source and server react to incoming updates or queries
the querying and reporting protocols the pessimistic cached and how the location information is transmitted. As in the
querying protocol and the distance-based protocol are to analysis, the delays for transmitting the messages are not
be preferred, because they combine an upper bound for the considered.
spatial accuracy of the returned location information with a The ten GPS traces used in our simulations have been ac-
good eciency. Of these two, the former is decidedly better quired on a typical car ride in the commuting trac around
for objects with sporadic movements and for higher query the city of Stuttgart. These traces have an average length
rates, but does not allow the accuracy of the location infor- of about 28 minutes and an average speed of 44.68 km/h. A
mation to be requested on application-level. Di erential GPS sensor with an accuracy between 2 and 5
meters has been used to determine the location information,
6 Simulation Results which is written to a le every second.
For each trace we have performed various simulation
For the update protocols discussed in Section 5, we have runs, where the number of transmitted messages has been
performed various simulation runs based on ten actual GPS calculated depending on a given query rate. Figure 9 shows
traces. To this end we have developed a simple simulator, the results of these simulation runs as the mean values of 100
which implements a location source with a primary copy separate simulations. The parameter values for the proto-
cols (e.g., the average and maximum speed) have been taken
10speed ratio pessimistic optimistic distance-based time-based combined
cached querying cached querying reporting reporting
max. avg. max. avg. max. avg. max. avg. max. avg.
0.260 74.167 5.922 335.798 22.725 99.817 49.664 99.998 16.971 99.926 6.131
0.291 88.299 6.507 287.795 23.286 99.964 49.005 88.299 17.067 99.506 6.604
0.302 56.288 6.138 294.754 19.696 99.982 50.597 100.078 13.096 101.970 6.208
0.352 104.133 6.761 253.763 20.917 99.899 49.091 100.233 19.121 88.127 7.034
0.354 73.911 6.998 263.790 21.720 99.887 45.730 75.895 17.598 104.243 7.238
Table 3: Simulation results: Maximum and average accuracy of the location information for the di erent update protocols.
100 combined
combined protocol
10
messages per second
messages per second
1
0.6
0.5
0.4
0.1
0.3 10
9
8
7
6
5
4 queries per second 0.01
3
2
20 40 1
60 80 100 120 140
160 180 200
0.001
uncertainty of secondary copy in meters 0.001 0.01 0.1 1 10
queries per second
Figure 7: Analytical results: Number of messages transmit- Figure 8: Analytical results: Number of messages transmit-
ted with the combined protocol depending on the number ted with the combined protocol depending on the number
of queries and the uncertainty of the secondary copy on the of queries. For the uncertainty of the secondary query the
server. optimal values taken from Figure 7 are used.
from the respective trace. of a certain trace. Because we have averaged the maximum
In general, these simulation results con rm the assump- speed over 5 seconds, the apparent speed of two neighbor-
tions we have made for the analysis. The number of mes- ing entries in the trace may be higher than the one we have
sages for the cached querying protocols is a little higher than assumed for the parameters of our protocols. This can lead
in the analysis. One reason for this is that the location infor- to a maximum accuracy that is greater than the requested
mation queried at the source is not determined exactly when one (100 m), when using a cached querying or the combined
queried, as we have assumed there. Instead, it has already protocol.
an average age of Tp =2 where Tp is the update interval of the
sensor system, in our case 1 second. Therefore, the location
information on the server has to be updated a little sooner 7 Conclusion and Future Work
than calculated. Also, the maximum velocity of the mobile
object is sometimes dicult to obtain from the GPS traces, In this paper, we have described di erent protocols for trans-
because the uncertainty of the positioning systems can have mitting location information and have compared them ac-
a great in uence on the distance of two neighboring entries. cording to their e ectiveness and eciency. These protocols
We therefore take the average of 5 seconds to determine the may be used, wherever location information is queried or
maximum speed. It happens a number of times that the the updated continuously. With the help of the analysis a suit-
ow of location information from the DGPS sensor is inter- able protocol can be found for a given environment. Fur-
rupted for a short time, which may also lead to variances in thermore, the analysis gives an estimation for the expected
the behavior of the protocols. network load and the average uncertainty of the transmit-
For the combined protocol, we have again determined the ted location information, as well as an upper bound for its
message count depending on the uncertainty value for the maximum uncertainty. Based on the querying and report-
secondary copy as well as on the query rate. The results of ing protocols, we have proposed a combined protocol that
this simulation are shown in Figure 10. Although the results integrates most of the advantageous properties of the basic
are again a little higher than the values determined in our protocols. Here, the analysis can give optimal parameter
analysis, the analysis re ects their characteristics nicely. settings for a certain environment.
For ve GPS traces with di erent speed ratios ranging For our future work, we plan to run further simulations
from 0.26 to 0.354 the maximum and average resulting ac- with di erent types of mobile objects, for example a per-
curacies are depicted in Table 3. The query rate has been son while window-shopping in a city or riding a bicycle, to
set to 0.1, as the results tend to vary more for higher rates, look at various movement characteristics. The results will
while the other parameters have the same values as before. then be used, to further improve the analysis, where nec-
For the accuracies, as compared to the number of transmit- essary. We also plan to extend the combined protocol by
ted messages, the results depend more on the characteristics adding a mechanism that allows it to adapt to changes in
11You can also read