Optimizing Unlicensed Band Spectrum Sharing With Subspace-Based Pareto Tracing
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Optimizing Unlicensed Band Spectrum Sharing With
Subspace-Based Pareto Tracing
Zachary J. Grey† , Susanna Mosleh§∗ , Jacob D. Rezac‡ , Yao Ma‡ , Jason B. Coder‡ , and Andrew M. Dienstfrey†
† Applied and Computational Mathematics Division, Information Technology Lab, National Institute of Standards and Technology, Boulder, CO, 80305
§ Associate, RF Technology Division, Communications Technology Lab, National Institute of Standards and Technology, Boulder, CO, 80305
∗ Department of Physics, University of Colorado, Boulder, CO, 80302
‡ RF Technology Division, Communications Technology Lab, National Institute of Standards and Technology, Boulder, CO, 80305
Abstract—To meet the ever-growing demands of data through- networks in the medium access control (MAC) and physical
arXiv:2102.09047v2 [eess.SP] 24 Feb 2021
put for forthcoming and deployed wireless networks, new wireless (PHY) layers.
technologies like Long-Term Evolution License-Assisted Access There have been many investigations of fairness in spectrum
(LTE-LAA) operate in shared and unlicensed bands. However, the
LAA network must co-exist with incumbent IEEE 802.11 Wi-Fi sharing among LAA and Wi-Fi networks [1]–[3]—although,
systems. We consider a coexistence scenario where multiple LAA these works do not consider optimizing key performance
and Wi-Fi links share an unlicensed band. We aim to improve indicators (KPIs). Contrary to [1]–[3], the authors in [4] and
this coexistence by maximizing the key performance indicators [5] maximize LAA throughput and total network sum rate,
(KPIs) of these networks simultaneously via dimension reduc- respectively, over contention window sizes of both networks
tion and multi-criteria optimization. These KPIs are network
throughputs as a function of medium access control protocols and while guaranteeing the Wi-Fi throughput satisfies a threshold.
physical layer parameters. We perform an exploratory analysis However [4] and [5] optimize only a single MAC layer pa-
of coexistence behavior by approximating active subspaces to rameter. A multi-criteria optimization problem was formulated
identify low-dimensional structure in the optimization criteria, in [6] to satisfy the quality of service requirements of LAA
i.e., few linear combinations of parameters for simultaneously eNodeBs by investigating the trade-off between the co-channel
maximizing KPIs. We leverage an aggregate low-dimensional
subspace parametrized by approximated active subspaces of interference in the licensed band and the Wi-Fi collision
throughputs to facilitate multi-criteria optimization. The low- probability in the unlicensed band. However, maximizing the
dimensional subspace approximations inform visualizations re- Wi-Fi throughput was omitted. Considering both PHY and
vealing convex KPIs over mixed active coordinates leading to an MAC layer parameters, [7] maximizes the weighted sum rate
analytic Pareto trace of near-optimal solutions. of an LAA network subject to Wi-Fi throughput constraint
Index Terms—LTE-LAA, Wi-Fi, wireless coexistence, MAC
and physical layer parameters, active subspace, Pareto trace with respect to the fraction of time that LAA is active. Alter-
natively, advantageous sharing of spectrum can be modeled as
a multi-criteria optimization problem where both Wi-Fi and
I. I NTRODUCTION
LAA KPIs, such as network throughputs on the unlicensed
As wireless communications evolve and proliferate into our bands, are simultaneously maximized with respect to their
daily lives, the demand for spectrum is growing dramatically. MAC and PHY layer parameters. The set of maximizing
To accommodate this growth, wireless device protocols are be- arguments quantify the inherent trade-off between LAA and
ginning to transition from a predominantly-licensed spectrum Wi-Fi throughputs.
to a shared approach in which use of the unlicensed spectrum The multi-criteria optimization formalism we propose is
bands appears to be inevitable. The main bottleneck of this further complicated by the high dimensionality of the input
approach is balancing new network paradigms with incumbent space. Specifically, our model requires 17 MAC and PHY
unlicensed networks, such as Wi-Fi. parameters to characterize the coexistence performance. Pre-
As one strategy to manage spectrum scarcity, providers are vious experience suggests that not all parameter combinations
beginning to operate Long-Term Evolution License-Assisted are equally important in determining KPIs quality. Active
Access (LTE-LAA) in unlicensed bands1 . Even though oper- subspaces supplement an exploratory approach for determining
ating LAA in unlicensed bands improves spectral-usage effi- parameter combinations which change KPI values the most,
ciency, it may have an enormous influence on Wi-Fi operation on average. The sets of parameter combinations defined by
and create a number of challenges for both Wi-Fi and LTE the active subspaces help inform KPI approximations and
networks as a means of constructively sharing the spectrum. visualizations over an aggregate low-dimension subspace—
Understanding and addressing these challenges calls for a simplifying the multi-criteria optimization.
deep dive into the operations and parameter selection of both We incorporate active subspace dimension reduction into a
multi-criteria optimization framework to analyze the shared
This work is U.S. Government work and not protected by U.S. copyright. spectrum coexistence problem involving Wi-Fi and LAA. The
1 Our focus is the operation of LTE base stations in an unlicensed band.
However, these base stations may have permission to utilize a licensed band proposed technique is extensible to many other spectrum
as well. sharing and communication systems, but LTE-LAA is usedas an example. The dimension reduction supplements a trade- procedures, they utilize different carrier sense schemes, dif-
off analysis of network throughputs by computing a Pareto ferent channel sensing threshold levels, and different channel
trace. The Pareto trace provides a continuous approximation of contention parameters, leading to different unlicensed channel
Pareto optimal points in a common domain of a multi-criteria access probabilities and thus, different throughputs.
problem [8], [9]—resulting in a near-best trade-off between Conforming with the analytical model in [7], [10], [11], the
differing throughputs. This offers a continuous description of LAA and Wi-Fi throughputs, indicated respectively by SL and
a parameter subset which quantifies high quality performance SW , are functions of m MAC and PHY layer parameters in a
of both networks, facilitated by a dimension reduction. vector θ conditioned on fixed values in a vector x,
II. S YSTEM M ODEL AND A SSUMPTIONS SL : Rm × {x} → R : (θ, x) 7→ SL (θ; x),
We consider a downlink coexistence scenario where two SW : Rm × {x} → R : (θ, x) 7→ SW (θ; x). (1)
mobile network operators (MNOs) operate over the same For this application, LAA throughput SL and Wi-Fi throughput
shared unlicensed industrial, scientific, and medical radio SW are only considered functions of m variable parameters
band. Previously, unlicensed bands were dominated by Wi-Fi in θ. This numerical study considers m = 17 parameters
traffic and, occasionally, used by commercial cellular carriers summarized in Table I. To simplify this study, we fix the re-
for offloading data otherwise communicated via LTE in the maining parameters in x governing the majority of the physical
licensed spectrum. Lately, LTE carriers are choosing to operate characteristics of the communication network—constituting a
in unlicensed bands in addition to data offloading. We assume fixed scenario x for a parameter study over θ’s.
the MNOs use time sharing to simultaneously operate in The problem of interest is to maximize a convex combina-
this band and we aim to analyze competing trade-offs in tion of network throughputs for the fixed scenario x over the
throughputs of the Wi-Fi and LTE systems. The network MAC and PHY parameters θ in a multi-criteria optimization.
throughput is a function of both physical and MAC layer Mathematically, we define the Pareto front by the following
parameters. We introduce the parameters defining the network optimization problem:
topology, the PHY layer, MAC layer protocols, and briefly
discuss the relation of these variables to network throughput. maximize
m
tSL (θ; x) + (1 − t)SW (θ; x), (2)
θ∈D⊂R
We consider a coexistence scenario in which the LAA
network consists of nL eNodeBs, while the Wi-Fi network is for all t ∈ [0, 1] where D is the parameter domain defined
composed of nW access points (APs)2 . The eNodeBs and APs by the ranges in Table I. The goal is to quantify a smooth
are randomly distributed over a particular area, while LAA trajectory θ(t) through MAC and PHY parameter space, or
user equipment (UEs) and Wi-Fi clients/stations (STAs) are trace [9], such that the convex combination of throughputs
uniformly and independently distributed around each eNodeB is maximized over a map θ : [0, 1] → D. In Section III we
and AP, respectively. Each transmission node serves a set of formalize this notion of a trace. In Section IV, we summarize
single antenna UEs/STAs and the user association is based an exploratory approach for understanding to what extent prob-
on the received power. We assume (i) both Wi-Fi and LAA lem (2) is convex [8] and how we can intuitively regularize.
are in the saturated traffic condition, i.e., at least one packet is The empirical evidence generated through visualization and
waiting to be sent, (ii) there are neither hidden nodes nor false dimension reduction provide justification for convex quadratic
alarm/miss detection problems in the network3 , and (iii) the approximations and subsequent quadratic trace in Section V.
channel knowledge is ideal, so, the only source of unsuccessful III. PARETO T RACING
transmission is collision. The physical data rate of the LAA
and Wi-Fi networks is a function of signal-to-interference- We refer to (2) as a maximization of the convex total
plus-noise ratio (SINR) that is related to and changes with the objective or scalarization. In this case, we have a single degree
link distances and propagation model. Any changes in data of freedom to manipulate the scalarization parametrized by
rates lead to different network throughput. t ∈ [0, 1] such that Jt (θ) = (1 − t)SW (θ; x) + tSL (θ; x).
The medium access key feature in both Wi-Fi and LAA By virtue of the necessary conditions for a (locally) Pareto
involves the station accessing the medium to sense the channel optimal solution, we must determine θ ∈ Rm critical for
by performing clear channel assessment prior to transmitting. Jt which necessarily implies ∇Jt (θ) = (1 − t)∇SW (θ) +
The station only transmits if the medium is determined to be t∇SL (θ) = 0 where 0 ∈ Rm is a vector of zeros and
idle. Otherwise, the transmitting station refrains from trans- ∇ is the gradient with respect to θ—this is referred to as
mitting data until it senses the channel is available. Although the stationarity condition. Moreover, denoting the Hessian
LAA and Wi-Fi technologies follow similar channel access matrices ∇2 SL (θ), ∇2 SW (θ), ∇2 Jt (θ) ∈ Rm×m , θ satisfies
strict second order Jt -optimality and is a locally (unique)
2 We are primarily focused on the operation of cellular base stations in the Pareto optimal solution if ∇2 Jt (θ) = (1 − t)∇2 SW (θ; x) +
unlicensed bands. However, LTE base stations may have permission to utilize t∇2 SL (θ; x) is (symmetric) negative definite [8], [9].
a licensed band as well. First, we review the necessary conditions for a continuous
3 We assume perfect spectrum sensing in both systems. The impact of
imperfect sensing is beyond the scope of this paper and investigating the (in t) solution to (2). Provided the set of all Pareto optimal
effect of sensing errors is an important topic for future work. solutions is convex, we can continuously parametrize the set ofTABLE I: MAC and PHY parameters influencing throughputs
Parameters Description Bounds Nominal Parameters Description Bounds Nominal
θ1 Wi-Fi min contention window size (8, 1024) 516 θ12 α?
LoS (17.3, 21.5) 19.4
θ2 LAA min contention window size (8, 1024) 516 θ13 α?
NLoS (31.9, 38.3) 35.1
θ3 Wi-Fi max back-off stage** (10−4
, 8) 4 θ14 Transmitter antenna gain** (10−4 dBi, 5 dBi) 2.5 dBi
θ4 LAA max back-off stage** (10−4 , 8) 4 θ15 Noise figure at each receiver (5 dB, 9 dB) 7 dB
θ5 Distance between transmitters (10 m, 20 m) 15 m θ16 Transmit power at each LAA eN- (18 dBm, 23 dBm) 20.5 dBm
odeB and Wi-Fi AP
θ6 Minimum distance between trans- (10m, 35 m) 22.5 m θ17 Carrier channel bandwidth (10 MHz, 20 MHz) 15 MHz
mitters and receivers
θ7 Height of each LAA eNodeB and (3 m, 6 m) 4.5 m x1 Number of LAA eNodeBs (nL ) – 6
Wi-Fi AP x2 Number of Wi-Fi APs (nW ) – 6
θ8 Height of each LAA UEs and Wi- (1 m, 1.5 m) 1.25 m
x3 Number of LAA UEs – 6
Fi STAs
θ9 Standard deviation of shadow fad- (8.03, 8.29) 8.16 x4 Number of Wi-Fi STAs – 6
ing x5 Number of unlicensed channels – 1
?
θ10 kLOS (45.12, 46.38) 45.75
x8 Scenario width – 120 m
?
θ11 kNLOS (34.70, 46.38) 40.54
x9 Scenario height – 80 m
Note: parameter ranges are established by 3GPP TS 36.213 V15.6.0 and 3GPP TR. 36.889 v13.0.0.
?
The path-loss for both line-of-sight (LoS) and non-LoS scenarios can be computed as k + α log10 (d) in dB, where d is the distance in meters between the transmitter
and the receiver. **Note that typical lower bounds are taken as zero however we transform parameters to a log-space and supplement with a sufficiently small lower bound.
m
all Pareto optimal solutions to (2) as t 7→ θ(t) for all t ∈ [0, 1] such that QL , QW ∈ S++ , aL , aW ∈ Rm , and cL , cW ∈ R
m
considering t as pseudo-time for an analogous trajectory where S++ denotes the collection of m-by-m postive definite
through parameter space—launching from one minimizing matrices—note the change in sign convention. Consequently,
argument to another. applying the sationarity condition to the form of the quadratic
approximations results in the closed form solution of the
Proposition 1. Given full rank ∇2 Jt (θ(t)) ∈ Rm×m , the one-
Pareto trace,
dimensional immersed submanifold parametrized by θ(t) ∈
Rm for all t ∈ [0, 1] is necessarily Pareto optimal such that 1 −1
θ(t) = [tQL + (1 − t)QW ] [(t − 1)aW − taL ] , (3)
2
∇2 Jt (θ(t))θ̇(t) = ∇SW (θ(t)) − ∇SL (θ(t)). referred to in this context as a quadratic trace. The quadratic
Proof. Differentiating the stationarity condition by composing trace is derived from the stationarity condition and thus
in pseudo-time, ∇Jt ◦ θ(t) = 0, results in consistent with Prop. 1. The challenge in our context with
d otherwise unknown forms of SW and SL is: how can we
0= (∇Jt ◦ θ(t)) assess conditions informing (3) or regularize the solve to guar-
dt
d d antee these conditions? We offer an approach which assess
= (1 − t) (∇SW ◦ θ(t)) + t (∇SL ◦ θ(t))
dt dt these conditions by visualization and subsequent regularization
= −∇SW ◦ θ(t) + (1 − t) ∇2θ SW ◦ θ(t) θ̇(t)
through subspace-based dimension reduction to inform convex
+ ∇SL ◦ θ(t) + t ∇2θ SL ◦ θ(t) θ̇(t) quadratic surrogates as approximations satisfying Prop. 1.
= ∇2 Jt (θ(t))θ̇(t) − (∇SW ◦ θ(t) − ∇SL ◦ θ(t)) . IV. ACTIVE S UBSPACES
Then, the flowout along necessary Pareto optimal solutions Following the development in [13], we introduce an ex-
constitutes an immersed submanifold of Rm nowhere tangent ploratory method for simplifying the problem statement in
to the integral curve generated by the system of differential (2). For ease of exposition, in this section we denote either
equations (See [12], Thm. 9.20)—i.e., assuming ∇2 Jt (θ(t)) scalar-valued throughput function by S : D ⊂ Rm → R with
is full rank, ∇2 Jt (θ(t))−1 (∇SW (θ(t)) − ∇SL (θ(t))) is the compact domain D and assume all integrals and derivatives
infintesimal generator of a submanifold P ⊆ Rm of locally used in this discussion exist as measurable functions. The main
Pareto optimal solutions contained in the flowout. results of the section rely on an eigendecomposition of the
symmetric positive semi-definite matrix C ∈ Rm×m defined
We note that the system of equations in Prop. 1, proposed as Z
in [9], constitutes a set of necessary conditions for optimality.
C= ∇S(θ)∇S(θ)T dθ (4)
The utility of Prop. 1 offers an interpretation that the solution D
set (if it exists) constitutes elements of a submanifold in Rm . R
with entries Cij = D (∂S/∂θi ) |θ (∂S/∂θj ) |θ dθ for i, j =
This formalism establishes a theoretical foundation for the use 1, . . . , m. For this application, the integral is taken uniformly
of manifold learning or splines over sets of points which are over D. The compact domain D is a hyper-rectangle con-
approximately Pareto optimal. structed4 from the Cartesian product of lower and upper
Suppose SW and SL are well approximated by convex bounds, θi,` ≤ θi ≤ θi,u for all i = 1, . . . , m.
quadratics as surrogates,
4 The chosen definition of (4) weights all parameter combinations equally
−SL (θ; x) ≈ θ T QL θ + aTL θ + cL over D and restricts the integration to feasible values (as summarized in Table
I). Alternative choices are available in scenarios where it is more appropriate
−SW (θ; x) ≈ θ T QW θ + aTW θ + cW , to weight parameters differently, but uniform is suitable to our application.A. Interpretability of Active Subspaces by projection to the active coordinates when r is chosen to
If rank(C) = r < m, its eigendecomposition C = be 1 or 2 based on the decay and gaps in the eigenvalues.
W ΛW T with orthogonal W satisfies Λ = diag(λ1 , . . . , λm ) These subsequent visualizations are referred to as shadow
with plots [14] or graphs {(W Tr θ i , S(θ i )}N
i=1 for N samples θ i
drawn uniformly (for this application). A strong decay leading
λ1 ≥ λ2 ≥ · · · ≥ λr > λr+1 = · · · = λm = 0. (5) to a small sum of trailing eigenvalues implies an improved
This defines two sets of important W r = [w1 . . . wr ] ∈ approximation over relatively few important directions while
Rm×r and unimportant W ⊥ m×(m−r) larger gaps in eigenvalues imply an improved approximation to
r = [w r+1 . . . w m ] ∈ R
directions over the domain. The column span of W r and the low-dimensional subspace [13]. Identifying if this structure
W⊥ exists depends on the decay and gaps in eigenvalues. We can
r constitute the active and inactive subspaces, respectively.
Note that (4) depends on a single scalar-valued response and subsequently exploit any reduced dimensional visualization
potentially differs for the separate throughputs in (1). and approximation to simplify our problem (2). However,
What do we mean by important directions? Partitioning W we must reconcile that our problem of interest involves two
into m orthonormal eigenvectors wi ∈ Rm representing the separate computations of throughput, SL and SW .
columns, W = [w1 . . . wm ], we can simplify wTi Cwi to
obtain an expression for the eigenvalues, C. Mixing Disparate Subspaces
Z
2
λi = wTi ∇S(θ) dθ. (6) Independently approximating active subspaces for the ob-
D
jectives SL and SW generally results in different subspaces
Reinterpreting
R the integral by definition of the expectation, of the shared parameter domain. The next challenge is to
E[f (θ)] = D f (θ)dθ for any measurable f , the eigenvalues define a common subspace that, while sub-optimal for each
can be interpreted as the mean squared directional derivative objective, is nevertheless sufficient to capture the variability
of S in the direction of wi ∈ Rm . Precisely, the directional of both simultaneously. Assume that we can reduce impor-
derivative can be written dSθ [w] = wT ∇S(θ) and we obtain tant parameter combinations to a common dimension r of
λi = E[dSθ2 [wi ]]—the ith eigenvalue is the mean squared potentially distinct subspaces. These subspaces are spanned
directional derivative in the direction of the ith eigenvector. by the column spaces of W r,L and W r,W chosen as the first
Thus, the inherent ordering (5) of the eigenpairs {(λi , wi )}m
i=1 r eigenvectors resulting from separate approximations of (4)
indicate directions wi which change the function S the most, for LAA and Wi-Fi throughputs, respectively. The challenge
on average, up to the r + 1, . . . , m directions which do not is to appropriately “mix” the subspaces so we may formulate
change the function at all [13]. In other words, the directional a solution to (2) over a common dimension reduction.
derivatives over the inactive subspace, Range(W ⊥ r ), are zero One method to find an appropriate subspace mix is to
provided the corresponding eigenvalues are zero. In fact, either
take the union of both subspaces. However, if r ≥ 2 and
throughput response from (1) is referred to as a ridge function
Range(W r,L ) ∩ Range(W r,W ) = {0} then the combined
over θ’s if and only if dSθ [w] = 0 for all w ∈ Null(W Tr ).
subspace dimension is inflated and visualization of subsequent
B. Ridge Approximations convex approximations becomes challenging. We use interpo-
Naturally, if the trailing eigenvalues are merely small as lation between the two subspaces to overcome these difficulties
opposed to identically zero, then the function changes much and retain the common reduction to an r-dimensional sub-
less over the inactive directions which have smaller directional space. The space of all r-dimensional subspaces in Rm is the
derivatives. This lends itself to a framework for reduced- r(m−r)-dimension Grassmann manifold (Grassmannian5 ) de-
dimension approximation of the function such that we only noted Gr(r, m) [15]. Utilizing the analytic form of a geodesic
approximate changes in the function over the first r active over the Grassmannian [15], we can smoothly interpolate from
directions and take the approximation to be constant over the one subspace to another—an interpolation which is, in general,
trailing m − r inactive directions [13]. Such an approximation non-linear. This is particularly useful because the distance
to S is called a ridge approximation by a function H referred between any two subspaces along such a path, [U r ] : R →
to as the ridge profile, i.e., Gr(r, m) : s 7→ [U r (s)] for all s ∈ [0, 1], is minimized
between the two subspaces Range(W r,L ), Range(W r,W ) ∈
S(θ) ≈ H(W Tr θ). (7) Gr(r, m) defining the interpolation. That is, the geodesic
In the event that the trailing eigenvalues of C are zero, then [U r (s)] minimizes the distance between Range(W r,L ) and
the approximation is exact for a particular H [13]. Range(W r,W ) while still constituting an r-dimensional sub-
In either case, approximation or an exact ridge profile, space in Rm .
the possibility of reducing dimension by projection to fewer,
r < m, active coordinates y = W Tr θ ∈ Rr can enable 5 Formally, an element of the Grassmannian is an equivalence class, [U ],
r
higher-order polynomial approximations for a given data set of all orthogonal matrices whose first r columns span the same subspace
as U r ∈ R m×r . That is, the equivalence relation X ∼ Y is given by
of coordinate-output pairs and an ability to visualize the ap- Range(X) = Range(Y ) denoted [X] or [Y ] for X, Y ∈ Rm×r full rank
proximation. For example, we can visualize the approximation with orthonormal columns.D. Ridge Optimization Algorithm 1 Monte Carlo Approximation of Throughput Active Subspaces
using Forward Differences
After approximating W r,L and W r,W we must make an Require: Forward maps SL and SW , small coordinate perturbation h ≥ 0,
informed decision to take the union of subspaces or compute a fixed scenario parameters x, and parameter bounds θ ` , θ u ∈ Rm .
new subspace Range(U r ) against some criteria parametrized 1: Generate N random samples uniformly, {θ̃ i }Ni=1 ∼ Um [−1, 1].
2: Compute M , M −1 , and b according to a uniform distribution of log-
over the Grassmannian geodesic. Then we may restate the scale parameters given θ ` and θ u .
original problem with a common dimension reduction, y = 3: for i = 1 to N do
U Tr θ, utilizing updated approximations over r < m com- 4: Transform the uniform log-scale sample to the original scale θ i =
exp(M −1 (θ̃ i − b)) where the exponential is taken component-wise.
bined/mixed active coordinates, 5: Evaluate forward maps (SL )i = SL (θ i ; x) and (SW )i =
SW (θi ; x).
maximize tHL (y; x) + (1 − t)HW (y; x), (8) 6: for j = 1 to m do
y∈Y
7: Transform the j-th coordinate perturbation to the original input
for all t ∈ [0, 1]. Once again, this optimization problem scale θ h = exp(M −1 (θ̃ i + hej − b)).
8: Approximate the j-th entry of the gradient at the i-th sample as
involves a closed and bounded feasible domain of parameter
SL (θ h ; x) − (SL )i
values Y = {y ∈ Rr : y = U Tr θ, θ ∈ D} which remains ˜ L )i,j =
(∇S ,
h
convex for convex D and a new subspace Range(U r ). The
˜ W )i,j , where ej is the j-th column of the m-
similarly for (∇S
utility of the dimension reduction is the ability to formulate a
by-m identity matrix.
continuous trace of the Pareto front [9]—involving the inverse 9: end for
of a convex combination of Hessians—in fewer dimensions. 10: end for
This is supplemented by visualization in the case r = 1 or 11: Take the average of the outer product of approximated gradients as
r = 2 providing empirical evidence of convexity. The resulting N
1 X ˜
C̃ L = ˜ L )i,; ,
(∇SL )i,; ⊗ (∇S
convex approximations and visualizations are summarized in N i=1
Section V.
similarly for C̃ W , where the tensor (outer) product is taken over the j-th
E. Computational Considerations index.
12: Approximate the eigenvalue decompositions
In order to approximate the eigenspaces of C L and C W T T
for the separate responses (1) we must first approximate C̃ L = W̃ L Λ̃L W̃ L and C̃ W = W̃ W Λ̃W W̃ W
the gradients of the network throughput responses which ordered by decreasing eigenvalues.
are not available in an analytic form. Specifically, we use 13: Observe the eigenvalue decay and associated gaps to inform a reasonable
choice of r.
forward finite difference approximations and Monte Carlo as 14: return The first r columns of W̃ L and W̃ W , denoted W̃ r,L and
a quadrature to approximate the integral of partial derivatives W̃ r,W .
in (4). These computations are supplemented by a rescaling of
all parameters to a unit-less domain which permits consistent
finite-difference step sizes. of the two separate matrices, defined by (4), for the two
The rescaling transformation is chosen based on the pro- throughputs. The details are provided as Algorithm 1.
vided upper and lower bounds, summarized in Table I. This The selection of r in Algorithm 1 can be automated by, for
ensures that the scale of any one parameter does not influence example, a heuristic which takes the largest gap in eigenvalues
finite difference approximations. Moreover, this alleviates the [13]. For simplicity, we take an exploratory approach to sele-
need for an interpretation or justification when taking linear -cting r which requires some user-input. We seek a visu-
combinations of parameters with differing units. Because alization of the response to provide empirical evidence that
the throughput calculations involve parameter combinations the throughputs are predominantly convex and hence require
appearing as exponents in the composition of a variety of com- r ≤ 2. We then check that the result offers acceptable
putations, we use a uniform sampling of log-scaled parameter approximations of throughputs with sufficient gaps in the
values. This transforms parameters appearing as exponents to second and third eigenvalues suggesting reasonable subspace
appear as coefficients—a useful transformation given that we approximations.
ultimately seek an approximation of linear combinations of
parameters inherent to the definition of a subspace. V. S IMULATION AND R ESULTS
The resulting scaling of the domain is achieved by the We demonstrate the ideas proposed in Section IV on the
composition of transformations θ̃ = M ln(θ)+b where M = LAA-Wi-Fi coexistence scenario described in Section II to
diag(2/(ln(θu,1 )−ln(θ`,1 )), . . . , 2/(ln(θu,m )−ln(θ`,m ))), b = maximize both throughputs simultaneously. We apply active
−M E[ln(θ)], and ln(·) is taken component-wise. To compute subspaces to simplify the multi-criteria optimization problem
this transformation, we take θ`,i and θu,i as the i-th entries (2) by focusing on a reduced set of mixed PHY and MAC
of the lower and upper bounds and E[ln(θ)] the mean of layer parameter combinations informing a trace of near Pareto
ln(θ) ∼ Um [ln(θ ` ), ln(θ u )]. This particular choice of scaling optimal solutions. Table I summarizes the scenario parameters
ensures θ̃ ∈ [−1, 1]m and E[θ̃] = 0 so the resulting domain and parameter bounds used to inform the throughput compu-
is also centered. Lastly, we use Monte Carlo as a constant tations and domain scaling, respectively.
coefficient quadrature rule to approximate the integral form2
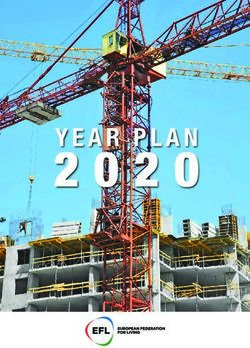
SW , RW (s$ ) = 0.90 SL , RL2 (s$ )= 0.90
15 15
t=0 t=0
1 1
10 10
uT2 3~
uT2 3~
0 5 0 5
0
-1 -1 0
-5
t=1 t=1
-1 0 1 -1 0 1
uT1 3~ uT1 3~
(a) Wi-Fi Throughput Shadow Plot (b) LAA Throughput Shadow Plot
Fig. 1: Pareto trace of quadratic ridge profiles. The quadratic Pareto trace (red curve and dots) is overlaid on a shadow plot over the mixed coordinates (colored
scatter) with the projected bounds and vertices of the domain (black dots and lines), Y. The quadratic approximations (colored contours) are computed as
least-squares fits over the mixed subspace coordinates. Also depicted is the projection of the non-dominated domain values from the N = 1000 random
samples (black circles). The trace begins at t = 0 with near maximum quadratic Wi-Fi throughput and we move (smoothly) along the red curve to t = 1
obtaining near maximum quadratic LAA throughput—maintaining an approximately best trade-off over the entire curve restricted to Y.
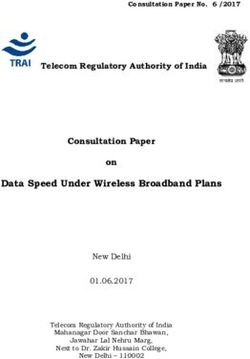
20 where the separate throughput coefficients of determination,
t=1 8 2 2
RL (s) and RW (s), are parametrized by successive quadratic
15 fits over new coordinates y i = U Tr (s)θ̃ i for all i = 1, . . . , N
6 defined by the Grassmannian geodesic [U r (s)] beginning at
SL
10 Range(W̃ r,W ) and ending at Range(W̃ r,L ).
4 The univariate subproblem in (9) can be visualized and,
5 t=0
in this experiment, achieved a unique maximizing argument
s∗ ∈ [0, 1] admitting a mixed subspace with orthonormal basis
2
5 10 15 20 given by two columns in a matrix U r (s∗ ) = [u1 u2 ], i.e.,
SW [u1 u2 ] ∈ Rm×2 taken at the optimal s∗ is the representa-
Fig. 2: Approximation of the Pareto front resulting from the quadratic trace. tive element of [U r (s∗ )]. The coefficients of determination
The approximate Pareto front (red curve) is shown with the non-dominated varied monotonically and intersected over the Grassmannian
throughput values (black circles) and scatter of N = 1000 random responses parametrization. Consequently, the subproblem results in an
colored according to the averaged throughputs. The red curve is the image of
the continuous trace through parameter space (visualized as the red curve in approximately equal criteria for the accuracy of the quadratic
Fig. 1) representing a near Pareto optimal set of solutions. ridge profiles HW and HL , i.e., RL 2
(s∗ ) ≈ RW 2
(s∗ ) ≈ 0.90.
The choice of quadratic least-squares approximation over
mixed active coordinates admits an analytic form (3) for the
The numerical experiment utilizes N = 1000 samples re- Pareto trace of (8). The analytic form of the quadratic trace is
sulting in N (m+1) = 18, 000 function evaluations to compute taken as a convenience in contrast to a higher-order polyno-
forward differences with h = 10−6 . The resulting decay mial approximation—or alternative approximation—and sub-
in eigenvalues gave relatively accurate degree-2 to degree-5 sequent trace. Part of the utility afforded by the dimension
least-squares polynomial approximations—computed utilizing reduction is simultaneously fitting and visualizing higher-
T
sets of coordinate-output pairs {(W̃ r,L θ̃ i , (SL )i )}N
i=1 and order approximations over the low-dimensional coordinates for
T
{(W̃ r,W θ̃ i , (SW )i )}N fixed N random samples of coordinate-output pairs. However,
i=1 —with varying coefficients of deter-
mination between 0.83−0.98 for both throughputs when r = 1 the quadratic fits were deemed reasonable approximations
or r = 2. In an effort to improve the ridge approximation while admitting convexity which can be observed directly in the
retaining the ability to visualize the response for the quadratic shadow plots. The convex quadratic ridge approximations,
polynomial, we fix r = 2 and mix the subspaces according quadratic Pareto trace, and projected boundary of the domain
to a quadratic approximation with corresponding coefficients over the mixed subspace are shown in Fig. 1. Additionally, the
of determination RL 2 2
and RW —computed using new sets of Pareto front approximation resulting from the quadratic trace
subspace coordinates and throughput (coordinate-output) pairs. is shown with the non-dominated designs in Fig. 2.
We select a criteria to mix subspaces achieving a balanced Observing Fig. 1, the continuous Pareto trace over the sub-
approximation when r = 2. This offers a subproblem, space coordinates (red curve) moves approximately through
the collection of projected non-dominated designs (black
2 2
maximize min{RL (s), RW (s)}, (9) circles). The non-dominated designs are determined from
s∈[0,1]the N = 1000 random samples; sorted according to [16]. In on-going work, we are investigating methods to estimate
However, it is not immediately clear through this visualization the set of PHY and MAC layer parameters which lead to
that the non-dominated designs constitute elements of an alter- acceptable values of KPIs for multiple coexisting wireless
native continuous approximation of the Pareto front—perhaps networks. Principled approaches for quantifying this novel
represented by an alternative low-dimensional manifold. In- concept, coined the region of wireless coexistence (RWC),
stead, we have supplemented a continuous parametrization of can lead to significantly-improved network operation. Real-
the Pareto front which is implicitly regularized as a solution world RWCs are high-dimensional sets with tens or hundreds
over a low-dimension subspace. However, there are infinite θ of parameters, and existing models are designed for low-
in the original parameter space which correspond to points dimensional problems. We aim to use the dimensionality-
along the trace depicted in Fig. 1—i.e., infinitely many m − r reduction techniques described above to combat issues with
inactive coordinate values which may change throughputs high dimensionality. We hope to additionally accelerate ex-
albeit significantly less than the two mixed active coordinates, isting RWC algorithms by efficiently taking advantage of a
y1 = uT1 θ̃ and y2 = uT2 θ̃. To reconcile the choice of infinitely parameter-manifold of near-optimal solutions with reduced
many inactive coordinates, we visualize subsets of 25 inactive intrinsic dimension by applying the methods described in
coordinate samples drawn randomly over Null(U Tr (s∗ )) along this work. We anticipate that new methods which leverage
a discretization of the trace. Fig. 2 depicts the corresponding compositions with the presented dimension reduction will
throughput evaluations from the inactive samples as red dots benefit from accelerations and regularization in an otherwise
along the approximated Pareto front—the red line connects challenging high-dimensional formulation.
conditional averages of throughputs over inactive samples
R EFERENCES
along corresponding points over the trace. The visualization
[1] H. He, H. Shan, A. Huang, L. Cai, and T. Quek, “Proportional Fairness
emphasizes that the throughputs change significantly less over Based Resource Allocation for LTE-U Coexisting With WiFi,” IEEE
the inactive coordinates in contrast to the range of values Access, vol. 5, pp. 4720—-4731, Sept. 2016.
observed over the trace. [2] C. Cano, D. Leith, A. Garcia-Saavedra, and P. Serrano, “Fair Coexistence
of Scheduled and Random Access Wireless Networks: Unlicensed
There is some bias in the approximation of the Pareto front LTE/WiFi,” IEEE ACM Trans. Netw., vol. 25, no. 6, pp. 3267—-3281,
(red curve) in Fig. 2 which is not a least-squares curve of Dec. 2017.
non-dominated throughput values (black circles) potentially [3] M. Mehrnoush, S. Roy, V. Sathya, and M. Ghosh, “On the Fairness
of Wi-Fi and LTE-LAA Coexistence,” IEEE Trans. Cognitive Commun.
due in part to the quadratic ridge approximations. We expect and Netw., vol. 4, no. 4, pp. 735—-748, Dec. 2018.
refinements to these approximations will further improve the [4] Y. Gao, B. Chen, C. Xiaoli, and J. Zhang, “Resource Allocation in LTE-
continuous Pareto approximation (shown in red in Fig. 2). LAA and WiFi Coexistence: a Joint Contention Window Optimization
Scheme,” IEEE Global Commun. Conf., Dec. 2017.
VI. C ONCLUSION & F UTURE W ORK [5] Y. Gao, “LTE-LAA and WiFi in 5G NR Unlicensed:
Fairness, Optimization and Win-Win Solution ,” IEEE
We have proposed a technique to simultaneously optimize SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI, Aug. 2019.
the performance of multiple MNOs sharing a single spec- [6] R. Yin, G. Yu, A. Maaref, and G. Y. Li, “A Framework for Co-Channel
Interference and Collision Probability Tradeoff in LTE Licensed-
trum resource. An exploratory analysis utilizing an exam- Assisted Access Networks,” IEEE Trans. Wireless Commun., vol. 15,
ple of LTE-LAA coexistence with Wi-Fi network identified no. 9, pp. 6078–6090, Sept. 2016.
a common subspace-based dimension reduction of a basic [7] S. Mosleh, Y. Ma, J. B. Coder, E. Perrins, and L. Liu, “Enhancing LAA
co-existence using MIMO under imperfect sensing,” IEEE Globecom
network-behavior model. This enabled visualizations and low- Workshops, Dec. 2019.
dimensional approximations which led to a continuous approx- [8] S. Boyd and L. Vandenberghe, Convex optimization. Cambridge
imation of the Pareto frontier for the multi-criteria problem of university press, 2004.
[9] M. Bolten, O. T. Doganay, H. Gottschalk, and K. Klamroth, “Tracing
maximizing all convex combinations of network throughputs locally pareto optimal points by numerical integration,” arXiv, Apr.
over MAC and PHY parameters. Such a result simplifies the 2020. [Online]. Available: https://arxiv.org/abs/2004.10820
search for parameters which enable high quality performance [10] S. Mosleh, Y. Ma, J. D. Rezac, and J. B. Coder, “Dynamic spectrum
access with reinforcement learning for unlicensed access in 5G and
of both networks, particularly compared to approaches which beyond,” IEEE 91st Veh. Technol. Conf., May 2020.
do not operate on a reduced parameter space. Analysis of the [11] ——, “A novel machine learning approach to estimating KPI and PoC
LAA-Wi-Fi example revealed an explainable and interpretable for LTE-LAA-based spectrum sharing,” IEEE Int. Conf. on Commun.
Workshops, June 2020.
solution to an otherwise challenging problem—devoid of any [12] J. M. Lee, An Introduction to Smooth Manifolds, 2nd. ed. New York:
known convexity or degeneracy until subsequent exploration. Springer, 2003.
Future work will incorporate alternative low-dimensional [13] P. G. Constantine, Active Subspaces: Emergine Ideas in Dimension
Reduction for Parameter Studies. SIAM-Society for Industrial and
approximations including both cases of Grassmannian mixing Applied Mathematics, Mar. 2015.
and subspace unions to improve the trace. We will also sum- [14] Z. J. Grey and P. G. Constantine, “Active subspaces of airfoil shape
marize a sensitivity analysis, active subspace approximation parameterizations,” AIAA Journal, vol. 56, no. 5, pp. 2003–2017, Apr.
2018.
diagnostics, and the parametrization of a predominantly flat [15] A. Edelman, T. A. Arias, and S. T. Smith, “The geometry of algorithms
manifold of near Pareto optimal solutions. with orthogonality constraints,” SIAM J. Matrix Anal. Appl., vol. 20,
Implementations of this work are anticipated to enable no. 2, pp. 303–353, 1998.
[16] H.-T. Kung, F. Luccio, and F. P. Preparata, “On finding the maxima of a
spectrum sharing in unlicensed bands by simplifying the de- set of vectors,” Journal of the ACM (JACM), vol. 22, no. 4, pp. 469–476,
sign of wireless network operation (control) and architecture. 1975.You can also read