3-D Mobile Node Localization Using Constrained Volume Optimization Over Ad-Hoc Sensor Networks
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
3-D Mobile Node Localization Using Constrained
Volume Optimization Over Ad-Hoc Sensor Networks
Sudhir Kumar, Shriman Narayan Tiwari and Rajesh M. Hegde
Department of Electrical Engineering
Indian Institute of Technology Kanpur, India
Email: {sudhirkr, shriman, rhegde}@iitk.ac.in
Abstract—This paper proposes a three dimensional mobile implementation of an algorithm which is simultaneously both
node localization and obstacle avoidance mechanism in ad-hoc cost and computationally efficient and also has low memory
sensor networks (AHSN). The localization task is performed requirement is a challenging task. The proposed algorithm
through constrained volume optimization. Obstacle avoidance follows a distributed localization architecture over randomly
is achieved through weighted distribution method. Constrained deployed sensor nodes. The applications of proposed algorithm
volume optimization is performed by minimizing the squared
include vehicular tracking, security and surveillance.
location error and imposing the distance and boundary condi-
tions. Obstacle avoidance is achieved by choosing the angular The notations used in this paper are described as follows.
direction which minimizes the cost function. The solution to the The bold faced letters (either in lower or upper case) denote
constrained optimization problems ensures that the method is one dimensional vector. (.)T represents transpose of a matrix
robust to change in environmental conditions and NLOS issues.
and the L2 norm of the argument is represented by ||.||.
Additionally, the algorithm is scalable and follows a distributed
approach to localization. The performance of this method is The rest of the paper is organized as follows. Section II
assessed by deploying nodes in both indoor and outdoor environ- describes the 3-D mobile nodes localization using constrained
ments. Improved localization accuracy is noted when compared volume optimization in detail. In Section III, performance
to conventional methods in terms of statistical location estimates
evaluation and experimental results are discussed before con-
and Cramer-Rao lower bound localization error analysis.
cluding the paper in Section IV.
I. Introduction II. 3-D Mobile Node Localization using Constrained
Volume Optimization
Three-dimensional localization in ad-hoc sensor networks
is one of the most challenging areas of research. A method This Section presents the basic framework for mobile node
for three dimensional localization of sensor nodes has been localization followed by a Section on distance estimation
described in [1]. Here, the localization accuracy is considerably using multi-modal signals. Subsequently, the problem of 3-D
low as detailed in the performance evaluation Section. A localization of mobile nodes is discussed. In the end, obstacle
distributed approach accelerates the localization process. The avoidance for mobile node guidance is discussed.
computations are distributed to nodes and thus reduce the
computational delays, when compared to performance using A. Basic framework for Mobile Node localization
a central system. A distributed approach of localization is
described in [2] using linear least square method. Following on An undirected topology of the sensor networks is described
the similar lines a generic Monte-Carlo localization method for by the tuple T = (N, E, W), where N, E and W represent the set
mobile node is discussed in [3]. [4] proposes a semi-definite of sensor nodes, edges connecting pair of nodes and weights
algorithm for node localization and in [5] an accurate and assigned to edges between each pair of nodes respectively.
cost effective algorithm for mobile nodes is discussed. During Weights in this context refer to the received signal observations
measurements, often some of the observations suffer from non- assuming one node is transmitting and other is receiving. The
line of sight (NLOS) communication issues. A few methods weight is invariant in both direction i.e. {wi j = w ji } ∈ R.
which incorporate NLOS measurements have been discussed The location of sources are assumed to be known. Location
in [6–8]. of the ith source is represented by (αi , βi , γi ), i ∈ S , where S is
the set of source nodes. (xti , yit , zit ), i ∈ N denotes the location
A localization algorithm which is computationally efficient
of unknown ith mobile node at each instant t. The problem of
and has low energy consumption is crucial in building efficient
localization is to find the location of these mobile nodes at each
wireless sensor network applications. This paper proposes a
instant. To estimate the location of mobile nodes, distances
three dimensional mobile node localization technique using
from each of the sources are computed. The distance between
constrained volume optimization. The proposed algorithm uses
pair of nodes is estimated based on received signal strength
the signal observations as received signal vector to perform the
[12, 13] and shown below.
localization task. There are existing methods based on received
signal strength (RSS) [9], time of difference of arrival (TDOA), λ
Pt − Pr = 10ne log d − 10 log(Gt Gr ( )ne ) + χσ (1)
time of arrival (TOA) [10], and direction of arrival (DOA) [11] 4π
available in literature. It is widely accepted that the design and where, Pt and Pr are the transmitted and received signal powers
978-1-4799-2361-8/14/$31.00 c 2014 IEEE in dB respectively. d, ne and χσ denote the distance between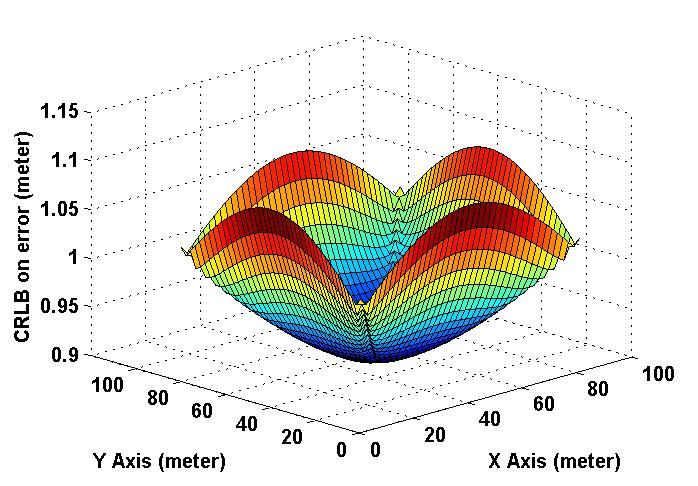
pair of nodes, path loss exponent and noise respectively. Gt , Gr node can hear to. Since, the wireless channel is noisy, thus,
and λ are the transmitting antenna gain, receiving antenna gain the intersection regions of all these spherical regions at any
and carrier wavelength respectively. In the following Section, instant is not a point but a region as shown in Figure 1.
relationship between received signal and distance is established Therefore, the estimated location of the mobile node is a point
experimentally for different modalities of signal. in the intersection region which minimizes the squared error
as described in the following Section. It must be noted, that,
B. Development of Attenuation Models using Multiple Modal- the experiments are conducted for mobile node localization
ities in a 3-dimensional space. However, it is equally applicable
in a 2-dimensional scenario. This intersection region for 2-
Experimental system is usually equipped with measuring dimensional case is a planar region.
different signal modalities. This makes the localization process
easy and low cost. With the availability of different signal
modalities, localization can be performed using any one of
the signal modality. Experiments are conducted to collect data R2
across different locations. The data is collected for received
signal observation, acoustic and light samples. Relationship R1
is established between received signal and distance between
source and node using Least-Squares approach. This method Intersection
best fits the large number of measurements and also provides Region
minimum Root Mean Squared Error (RMSE). The relations
may vary under different environmental conditions. In this
work, the experiments are conducted in Indian Institute of
Technology (IIT), Kanpur during autumn. The experiments are R3
conducted for the Crossbow motes. The relationship for the
received power with distance is represented as
Pr = −49.74 − 37.45 log(d) (2) Fig. 1. Figure illustrating the formation of intersection region using overlap
of circular regions
where, Pr represents the received power. The Euclidean dis-
tance between node and source is denoted by d. Now, the
experiment is repeated for the acoustic samples. At various D. Constrained Volume Optimization Method Over an Am-
locations, acoustic samples are collected. Then relationship biguous Region
between received acoustic samples with distance is captured
with the help of Equation 3. The inter-nodal distance between a mobile node and a
source, to which the node hears at instant t is computed using
Pr = 679 − 249.9 log(d) (3) Equation 1. For distance calculation, relation between received
signal observation and distance is established in Equation 5.
Similarly, for the case of light samples, the relationship is
The objective of the proposed algorithm is to minimize the
represented as
radial error, which is the squared difference of the actual
Pr = −53.67 exp (0.4254d) + 808.7 exp (−0.02076d) (4) distance and the estimated distance from each of the sources
[4]. Boundary conditions have been taken into account through
The fusion model using confidence-weighted averaging is the first constraint. The second inequality in the constraints [6–
described in [14]. The fused signal model for received sig- 8] of Equation 6 takes care of the NLOS measurements. The
nal observation, acoustic and light can be obtained through problem of node localization is then formulated as
Equation 5.
Pr = 45.94 − 35.38 log(d) (5) S
X
Minimize |kXs − Xit k2 − d̃2s,i |2 W s,i
Node localization can be performed either using individual s=1
signal modality or fused sensor data. Through experiments Subject to (6)
it has been found that the localization accuracy improves by i
using fused sensor data. It may be noted that Gt , Gr and Xmin ≤ Xt ≤ Xmax
λ are captured as constants in Equations 2, 3, 4 and 5. In kX s − Xit k ≤ d˜s,i , ∀s ∈ {S }
the following Section, 3-D localization of mobile nodes under h i>
volume ambiguity is discussed. where, Xmin = xmin ymin zmin and Xmax =
h i>
xmax ymax zmax are the minimum and maximum
C. 3-D Localization of Mobile Nodes under Volume Ambiguity coordinate vectors of network
i> hin the giveni>reference frame.
Xit = xti yit zit and X s = α s β s γ s are the vectors
h
The signals transmitted by a source are spread out omni-
directionally. Thus, if nth node receives a signal from sth consisting of the coordinates of ith mobile node at instant t
source, which is located at a distance R from the node, then and sth source node respectively. The estimated Euclidean
the node is likely to be inside a spherical region of radius distance between ith mobile node and sth source node is
R with its center located at the position of the sth source. represented by d̃2s,i . Here, d̃ s,i obtained is same as the distance,
The location of the node can be estimated by the intersection d defined through Equation 1. W s,i represents the confidence
of these spherical regions from all the sources to which the with which measurement are recorded at the node from each
of the sources. A higher weight value signifies the reliability
of the received signal. For the experimental purpose, W s,i is
defined in Equation 7.
1 − exp(−Pr /Pt ) i f, Pr > 0.3Pt
(
W s,i = (7)
0.26 otherwise
where, Pr and Pt are the received and transmitted power
respectively. Clearly, the problem formulated in Equation 6
is a non-convex problem. A solution to this problem becomes
a tedious task. So, to obtain a feasible solution, the problem
can be relaxed and can be reformulated as a convex problem.
The function, f (Xit ) = |kXs − Xit k2 − d̃2s,i |2 is a non-convex Fig. 2. Figure illustrating an angular region in 2-Dimensional plane with
obstacle.
function. Let, Q be the region, where f (Xit ) is non-convex. So,
a convex relaxation to this function can be a function, g(Xit )
such that experiments. Experimental results on localization error have
g(Xit ) ≤ f (Xit ), ∀ Xti ∈ Q (8) also been discussed.
This convex relaxation is the tightest possible lower bound III. Performance Evaluation
of this non-convex function [15]. This problem can be solved
by numerical techniques. Average localization improvement of In this Section, first Cramer-Rao bound analysis of local-
1.1m is obtained by using the constraints. ization error is presented. Subsequently, the results of mobile
node localization for both indoor and outdoor environments
are described.
E. Obstacle Avoidance Algorithm for Mobile Node Guidance
This Section describes a mobile node guidance algorithm A. Cramer-Rao Lower Bound (CRLB) Analysis
considering obstacle avoidance as described in [16]. The The CRLB of error variance of the proposed algorithm is
method uses a 2-dimensional Cartesian grid as the network analysed through following expression [17].
model. The method employs a two step reduction process to
estimate the next direction of sensor. In the first step, a 2- FRxx + FRyy
dimensional weight distribution is developed and is converted σ2k ≥ 2
(9)
to a 1-dimensional angular weight distribution. Then, in the FRxx FRyy − FRxy
next step from this 1-dimensional angular weight distribution Equation 9 can also be represented as
the next direction of motion is selected. The two steps are P −2
described as follows. 1 i∈H(m) dk,i
σk = P
2
(10)
1) Computing Radial Weight Distribution for Optimal Path b i∈H 0 (m) P M ( dk⊥i, j di, j 2
2 2 )
j=i+1 dk,i dk, j
Selection : The 2-dimensional Cartesian grid is divided into
a number of small cells. The ultrasound sensors are used to where, FRxx , FRxy , FRyy , b, dk⊥i, j and di, j are as described
derive the weights to each of these cells. Ultrasound signals are in [17]. H(m) represents the set of M mobile nodes whose
transmitted exhaustively over the entire 2-dimensional plane. location has been computed and H 0 (m) is the set of first M − 1
Based on the received signals on the receiver the weights localized nodes. Similar CRLB expressions can be written as
of cells corresponding to the obstacle are incremented. From in Equation 9 and 10 for each of the mobile nodes.
these weight values, the 2-dimensional weight distribution is
generated. The 2-dimensional region is then divided into n
B. Localization Experiments in Indoor and Outdoor Scenarios
angular regions each of width α as shown in Figure 2. For
the experimental purpose n is taken to be six, this gives In this Section, performance of the algorithm is analysed
the value of α to be 60◦ . The weights lying in a particular through extensive simulation and experiments. Subsequently,
region are summed and a 1-dimensional angular distribution is real field deployment is done for both indoor and outdoor
formed. The horizontal axis of this 1-dimensional distribution environments to validate the algorithm. The experiments are
corresponds to angular values (0◦ to 360◦ ), 0◦ taken to be the conducted with the use of eight sources.
initial heading direction of the sensor. While the vertical axis
corresponds to the weights assigned to each of the angular 1) Experimental Results in Indoor Environment: Indoor
values. experiments have been conducted for a network dimension of
20m ×20m ×5m. Crossbow motes, MTS310 sensor boards are
Let G(θ) be the weight distribution as a function of angle deployed both as sources and sensor node as shown in Figure
theta. From G(θ), choose that angle which minimizes the 3. XM2110 IRIS board and MIB520 USB mote interface are
distance from the target and maximizes the alignment from used as gateway to configure the network. Motes communicate
the target as described in [16]. with each other through IEEE 802.15.4 protocol.
The following Section presents the results on mobile node The average error and error variance of the proposed
localization for simulations as well as indoor and outdoor algorithm for indoor experiments over time can be seen in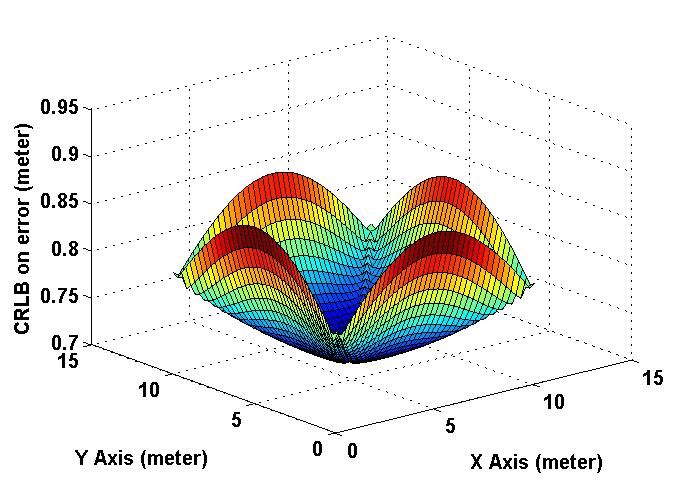
TABLE I. Table illustrating the average radial error for different experimental conditions over time for communication range (R) = 55% of network
dimension
T = 10 T = 20 T = 30 T = 40 T = 50 T = 60 T = 70 T = 80 T = 90 T = 100
Simulation 6.06 5.98 5.97 5.97 5.95 5.96 5.94 5.93 5.93 5.87
Outdoor Experiment 6.56 6.47 6.45 6.48 6.55 6.55 6.50 6.53 6.57 6.55
Indoor Experiment 1.82 1.70 1.70 1.72 1.78 1.71 1.69 1.70 1.68 1.69
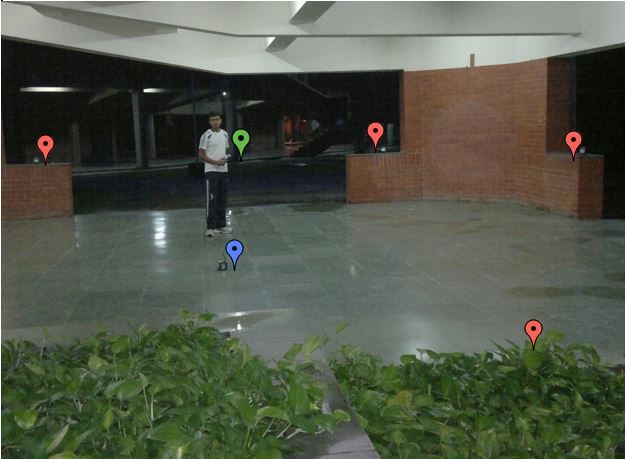
Fig. 3. Figure illustrating the indoor experimental deployment: four sources
(Crossbow motes MTS310) are shown shown in red, mobile mote in green
and gateway (XM2110 IRIS board and MIB520 USB mote interface) in blue Fig. 5. Figure illustrating the CRLB for indoor deployment in 2-dimensions
Table I. Low variance in estimation error over time signifies the
robustness of the proposed algorithm. The minimum variance
of error obtained from the CRLB [17, 18] is 0.72m, as shown
in Figure 5, which indicates significantly better performance.
2) Experimental Results in Outdoor Environment: Outdoor
experiments are conducted by deploying the sensor nodes and
source in a network of 100m × 100m × 5m. Eight National
Instruments (NI) WSN - 3212 and 3202 nodes are deployed
as source nodes in the network as shown in Figure 4. NI 9792,
gateway communicates to the nodes using IEEE 802.15.4
protocol.
Fig. 6. Figure illustrating the CRLB for outdoor deployment in 2-dimensions
I. Thus, the low variance in localization error over time for
simulations, indoor and outdoor experiments show efficient
performance of the proposed algorithm. The following Sec-
tion presents the localization error analysis of the proposed
algorithm when compared with other algorithms.
C. Localization Error Analysis
Average radial error is chosen as a measure of performance
Fig. 4. Figure illustrating the outdoor experimental deployment: four sources
(NI 3202 WSN node) are shown in red, mobile node (NI 3212 WSN node) analysis. Average radial error is defined as the absolute dis-
in green and gateway (NI 9792) in blue tance between actual and estimated node location at an instant
averaged over large number of observations. Localization error
analysis is performed by computing the effect of change
The average error and average error variance of the pro- of time duration on radial error. The effect of change of
posed algorithm for outdoor experiment over time can be seen communication range on average localization error is also
from Table I. A very less variation in the estimation error is observed. Experiments are conducted using eight sources and
observed, this indicates the robustness of proposed algorithm one mobile node. However, the localization task can be easily
over time. The minimum variance of the error is found to be performed for multiple nodes and sources.
0.92m as shown in Figure 6 [17, 18], which shows the efficient
The sources are placed symmetrically on the boundary of
performance of the proposed method.
the rectangular deployment region whereas, the node is mobile
The result for the simulated data are also shown in Table in nature. The node can traverse at any speed within a speed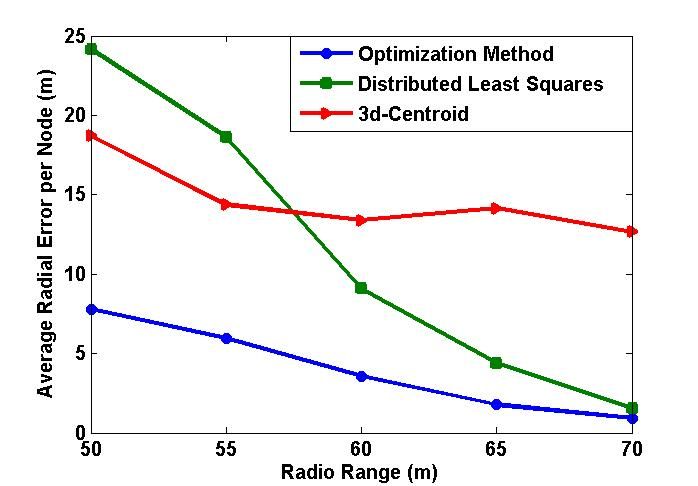
range of 0 to 10 m/s. the impact of wireless channel and variation of received signal
observation with time and due to environmental conditions
1) Average Localization Error over Time: The proposed with the help of the volume constraints. The application of
algorithm and other two algorithms, 3D-Centroid algorithm the algorithm to both LOS and NLOS communications makes
[1] and distributed least square algorithm [2] for 3-dimension it robust. The proposed algorithm performs consistently well
are compared by varying time duration of localization process irrespective of the variation in the localization duration and
as shown in Figure 7. The effect of varying time duration is radio communication range. The focus of future work is
observed on average radial error. The proposed optimization on developing a three dimensional localization algorithm in
algorithm outperforms the two algorithms [1] and [2]. mobile sensor networks using mobile nodes and anchors.
Acknowledgment
This work was supported in part by Indian Space Research
Organisation (ISRO).
References
[1] H. Chen, P. Huang, M. Martins, H. C. So, and
K. Sezaki, “Novel centroid localization algorithm for
three-dimensional wireless sensor networks,” in Wire-
less Communications, Networking and Mobile Comput-
ing, 2008. WiCOM’08. 4th International Conference on.
IEEE, 2008, pp. 1–4.
[2] F. Reichenbach, A. Born, D. Timmermann, and R. Bill,
Fig. 7. Figure illustrating average localization error over time. Communica-
“A distributed linear least squares method for precise
tion Range (R) = 55m localization with low complexity in wireless sensor net-
works,” in Distributed Computing in Sensor Systems.
2) Effect of Varying Radio Communication Range: To Springer, 2006, pp. 514–528.
evaluate the performance of the proposed algorithm, Figure [3] H. Xu, J. Luo, and M. Luo, “Mobile node localization al-
8 shows the variation of average localization error with the gorithm in wireless sensor networks for intelligent trans-
change in radio communication range. The proposed opti- portation systems,” in Distributed Computing and Appli-
mization algorithm has better performance for all values of cations to Business Engineering and Science (DCABES),
communication range, as seen from Figure 8. A node can hear 2010 Ninth International Symposium on. IEEE, 2010,
many sources, if communication range of source is larger. This pp. 491–494.
helps in decreasing the location uncertainty of the node as [4] P. Biswas and Y. Ye, “Semidefinite programming for ad
seen from Figure 8. For communication range of 70m, average hoc wireless sensor network localization,” in Proceed-
radial error comes below 1m in the given network. ings of the 3rd international symposium on Information
processing in sensor networks. ACM, 2004, pp. 46–54.
[5] S. Alikhani, M. St-Hilaire, and T. Kunz, “icca-map: a
new mobile node localization algorithm,” in Wireless and
Mobile Computing, Networking and Communications,
2009. WIMOB 2009. IEEE International Conference on.
IEEE, 2009, pp. 382–387.
[6] S. Venkatesh and R. M. Buehrer, “Nlos mitigation us-
ing linear programming in ultrawideband location-aware
networks,” Vehicular Technology, IEEE Transactions on,
vol. 56, no. 5, pp. 3182–3198, 2007.
[7] E. Larsson, “Cramer-rao bound analysis of distributed po-
sitioning in sensor networks,” Signal Processing Letters,
IEEE, vol. 11, no. 3, pp. 334–337, 2004.
[8] I. Guvenc and C.-C. Chong, “A survey on toa based
wireless localization and nlos mitigation techniques,”
Fig. 8. Figure illustrating the effect of change of radio communication on Communications Surveys Tutorials, IEEE, vol. 11, no. 3,
average localization error pp. 107–124, 2009.
[9] E. Goldoni, A. Savioli, M. Risi, and P. Gamba, “Experi-
IV. Conclusion mental analysis of rssi-based indoor localization with ieee
802.15. 4,” in Wireless Conference (EW), 2010 European.
In this paper, a three dimensional localization algorithm IEEE, 2010, pp. 71–77.
for mobile nodes along with obstacle avoidance mechanism [10] S. K. Meghani, M. Asif, and S. Amir, “Localization of
is proposed. The performance of the algorithm is analysed by wsn node based on time of arrival using ultra wide band
varying the communication range. Cramer-Rao lower bound spectrum,” in Wireless and Microwave Technology Con-
analysis is also performed. Performance is evaluated for both ference (WAMICON), 2012 IEEE 13th Annual. IEEE,
indoor and outdoor deployments. The algorithm accounts for 2012, pp. 1–4.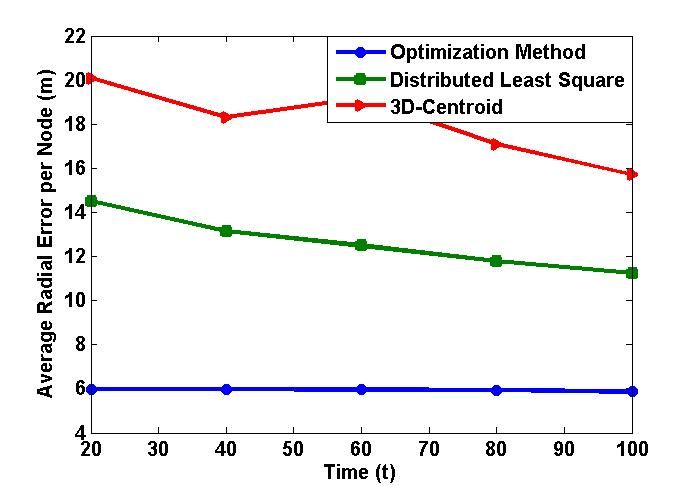
[11] F.-K. Chan and C.-Y. Wen, “Adaptive aoa/toa localization [15] [Online]. Available: http://www.winlab.rutgers.edu/
using fuzzy particle filter for mobile wsns,” in Vehicular ∼crose/322 html/convexity2.pdf
Technology Conference (VTC Spring), 2011 IEEE 73rd. [16] J. Borenstein and Y. Koren, “The vector field histogram-
IEEE, 2011, pp. 1–5. fast obstacle avoidance for mobile robots,” Robotics and
[12] T. S. Rappaport et al., Wireless communications: princi- Automation, IEEE Transactions on, vol. 7, no. 3, pp. 278–
ples and practice. Prentice Hall PTR New Jersey, 1996, 288, 1991.
vol. 2. [17] N. Patwari, A. O. Hero III, M. Perkins, N. S. Correal,
[13] M. Bertinato, G. Ortolan, F. Maran, R. Marcon, A. Mar- and R. J. O’dea, “Relative location estimation in wireless
cassa, F. Zanella, M. Zambotto, L. Schenato, and sensor networks,” Signal Processing, IEEE Transactions
A. Cenedese, “Rf localization and tracking of mobile on, vol. 51, no. 8, pp. 2137–2148, 2003.
nodes in wireless sensors networks: Architectures, algo- [18] S. Kumar, V. Sharan, and R. M. Hegde, “Energy efficient
rithms and experiments,” 2008. optimal Node-Source localization using mobile beacon
[14] A. Schörgendorfer and W. Elmenreich, “Extended in Ad-Hoc sensor networks,” in Globecom 2013 - Ad
confidence-weighted averaging in sensor fusion,” in Pro- Hoc and Sensor Networking Symposium (GC13 AHSN),
ceedings of the Junior Scientist Conference JSC, vol. 6, Atlanta, USA, Dec. 2013, pp. 509–514.
2006, pp. 67–68.You can also read