Plug Regime Flow Velocity Measurement Problem Based on Correlability Notion and Twin Plane Electrical Capacitance Tomography: Use Case - MDPI
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
sensors
Article
Plug Regime Flow Velocity Measurement Problem Based on
Correlability Notion and Twin Plane Electrical Capacitance
Tomography: Use Case
Volodymyr Mosorov * , Grzegorz Rybak and Dominik Sankowski
Institute of Applied Computer Science, Lodz University of Technology, 90-537 Łódź, Poland;
grzegorz.rybak@p.lodz.pl (G.R.); dsan@kis.p.lodz.pl (D.S.)
* Correspondence: volodymyr.mosorov@p.lodz.pl
Abstract: In this paper, the authors present the flow velocity measurement based on twin plane
sensor electrical capacitance tomography and the cross-correlation method. It is shown that such a
technique has a significant restriction for its use, particularly for the plug regime of a flow. The major
issue is with the irregular regime of the flow when portions of propagated material appear in different
time moments. Thus, the requirement of correlability of analyzed input signal patterns should be
met. Therefore, the checking of the correlability should be considered by such a technique. The article
presents a study of the efficiency of the original algorithm of automatic extraction of the suitable
signal patterns which has been recently proposed, to calculate flow velocity. The obtained results
allow for choosing in practice the required parameters of the algorithm to correct the extraction of
signal patterns in a proper and accurate way. Various examples of the application of the discussed
algorithm were presented, along with the analysis of the influence of the parameters used on the
Citation: Mosorov, V.; Rybak, G.;
Sankowski, D. Plug Regime Flow
quality of plugs identification and determination of material flow.
Velocity Measurement Problem Based
on Correlability Notion and Twin Keywords: electrical capacitance tomography; pattern; correlability; multiphase flow
Plane Electrical Capacitance
Tomography: Use Case. Sensors 2021,
21, 2189. https://doi.org/10.3390/
s21062189 1. Introduction
The flow velocity measurements are often applied to many industrial processes,
Academic Editors: Kenneth Loh and
such as food, mineral, chemical, and pharmaceutical production [1–5]. For one phase
Ruben Specogna
flow, velocity measurement is a relatively simple task. However, it is still challenged
in multiphase flow applications when the velocity measurement of the chosen phase is
Received: 22 January 2021
required. One of the concrete applications is plastic bottle production, where a pneumatic
Accepted: 16 March 2021
transport system transports granular material. One of the basic efficiency criteria for such
Published: 21 March 2021
a transport system is the maintenance of low air pressure during material propagation.
Thus, continuous measurement of solid material velocity is necessary for estimating the
Publisher’s Note: MDPI stays neutral
transportation efficiency of such a system. Nowadays, in practice, different techniques for
with regard to jurisdictional claims in
published maps and institutional affil-
the flow velocity measurement are used, although they are still not perfect. Sometimes,
iations.
invasive techniques are used. They require sensors inserted into the pipe, and as a result,
they disturb the material propagation and are exposed to abrasion over time. There are
also laser methods and other optical methods, but they have a limited scope of application
related to its radiation issues.
One of the techniques that are not invasive is process tomography. The electrical
Copyright: © 2021 by the authors.
capacitance tomography (ECT) technique is successfully applied when flow phases are not
Licensee MDPI, Basel, Switzerland.
electrically conductive. In the mentioned pneumatic transport, this situation occurs. Such a
This article is an open access article
distributed under the terms and
technique is relatively low-cost and safe, especially its measurement sensor part. The classi-
conditions of the Creative Commons
cal tomographic image velocimeter (TIV) includes twin sensor planes mounted around an
Attribution (CC BY) license (https://
investigated pipe/vessel/column. Each sensor consists of electrodes (typically, the number
creativecommons.org/licenses/by/ of the electrodes is 8, 12 rarely) and it is used to measure the electrical capacitance between
4.0/). any pairs. Based on these capacitance measurements, an image reconstruction algorithm is
Sensors 2021, 21, 2189. https://doi.org/10.3390/s21062189 https://www.mdpi.com/journal/sensors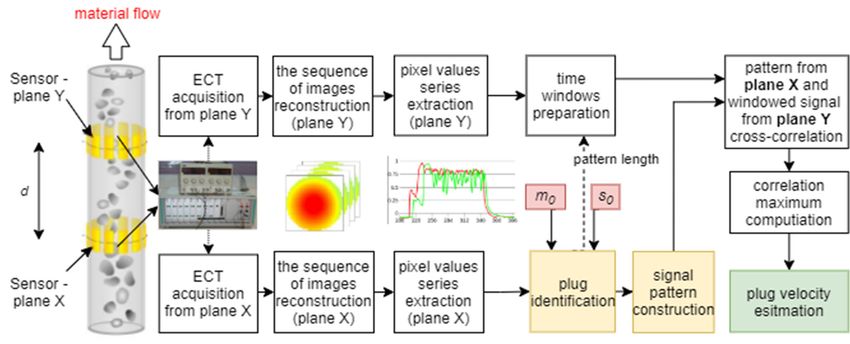
Sensors 2021, 21, 2189 2 of 13
next utilized to reconstruct the material distribution inside the investigated volume of inter-
est. To calculate the material velocity between the sensors’ planes, a series of reconstructed
images are required.
The correctness and reliability of a particle velocity measurement of multiphase
flow are still a key challenge, despite the fact that currently there are many published
elaborations related to this research scope [6–8]. Excluding the problems concerning the
time stability of the measured capacitances and calibration limitations, the main problem is
how to correctly calculate flow velocity based on reconstructed images.
Although different techniques are proposed, for instance, the method based on the
computation of the sensitivity matrix spatial gradient [9,10], the main method of velocity
calculation is still a classical cross-correlation one [11–16]. To estimate flow velocity in
the chosen pixel of the volume of interest, first, the cross-correlation function of signals
representing material distribution changes within the pixel of the first and second plane of
the tomographic unit is calculated. It is assumed that the global maximum of the calculated
function corresponds to a transit time of material propagation between two sensor planes.
Moreover, it is important to mention that the transit time is calculated for a time window.
Therefore, this calculated velocity corresponds to the average material velocity between
two sensor planes.
The signal correlation function is based on the indicated time intervals, in which the
range of measurements used in the calculations is determined. The indicated time intervals
constitute time windows for the measurement data. Most often, such a window is set as a
constant value before performing the calculations and its scope does not change during the
analysis. Unfortunately, there are no hints or information on what basis the parameters
were determined [16–20]. On the other hand, it turns out that the window width parameter
is important in the context of ensuring the effectiveness of the algorithm. Due to this fact,
it is obvious that the pattern should be computed based on the signal that is processed.
Warsito and Fan 2008 [21] proposed the technique of tracing flow structures but without
indicating the mechanism of time window selection. Fuchs et al. [22] described a method
based on determining the length of a plug, but without explaining how to determine the
length of time windows for the flow velocity estimation algorithm. The problem is still
omitted by the researchers, for instance, in the articles published in the last years [4,23,24].
The existing gap has recently been filled up by developing a new concept for an
appropriate algorithm allowing the automatic determination of the time window (Mosorov
et al. 2020) [11]. The authors propose automatically detecting signal patterns to measure
the particle velocity based on the obtained series of tomographic images. However, the
proposed algorithm uses arbitrary chosen parameters, and their choices have not been
justified. There is no study presenting the dependence between the accuracy of flow
velocity measurement and parameter values. Therefore, the article has several aims:
• Justification of the choice of parameters to detect signal patterns to measure flow
velocity.
• Determination of the problems for utilization of the proposed approach in real-case-
studies.
The authors suppose that the obtained results of the conducted study can be success-
fully utilized in many applications that use the cross-correlation method to calculate time
parameters of flow measurements, where the plug regime occurs.
2. Theoretical Considerations
An ECT tomography system to determine a velocity profile in the region of interest
should consist of at least two plane sensors mounted around a pipe (see Figure 1). To ensure
fulfilling the assumption on the laminar character of the investigated flow, a distance
between the two planes should be chosen, as short as possible. Such an ECT tomographic
velocimeter provides the constant speed of imagining, representing the distribution of the
material concentrations in cross-sections of both planes.
ensure fulfilling the assumption on the laminar character of the investigated flow, a dis-
tance between the two planes should be chosen, as short as possible. Such an ECT tomo-
Sensors 2021, 21, 2189 3 of 13
graphic velocimeter provides the constant speed of imagining, representing the distribu-
tion of the material concentrations in cross-sections of both planes.
Diagram
Figure 1.Figure 1. of flow velocity
Diagram measurement
of flow realized by a two-plane-sensor
velocity measurement electrical capacitance
realized by a two-plane-sensor tomography
electrical capaci-(ECT)
tanced is
tomography, the distance (ECT)
tomography between the two planes.
tomography, d is the distance between the two planes.
Material concentrations are represented as images reconstructed based on raw mea-
Material concentrations are represented as images reconstructed based on raw meas-
surement. The typical image resolution is 32 × 32 pixels. To calculate the flow velocity
urement. The typical image resolution is 32 × 32 pixels. To calculate the flow velocity pro-
profile, the cross-correlation method is utilized. First, the cross-correlation function is
file, the cross-correlation
calculated methodbetween is utilized.
changes First,
in the the cross-correlation
corresponding pixel values function is calcu-
of the images, and then,
lated between changes
the maximumin the of corresponding
the cross-correlationpixel values of isthe
function images, and
determined. Suchthen, the max-
a founded maximum
imum of the cross-correlation
determines the time function
delay of is material
determined. Such abetween
propagation founded themaximum
two planes.deter-
Let x
mines the time delay of material i,j ( nT ) and y (
propagation
i,j nT ) define the material distribution
between the two planes. changes for (i, j) pixel of the
Let , ( nth) and ( ) defineimage
I × J , tomographic (see Figure
the material 1) captured
distribution with the
changes ( , ) rate
forframe pixelresolution
of T
obtained from planes X and Y of the twin plane
the th I × J tomographic image (see Figure 1) captured with the frame rate resolution tomograph, respectively.
As mentioned before, it is assumed that flow has a laminar character. Therefore,
obtained from planes and of the twin plane tomograph, respectively.
a strong relationship between the material distribution changes coming from the
As mentioned before, it isand
assumed that flow has a laminar character. Therefore, a X plane
and Y one exists, the cross-correlation function R i,j ( kT ) of the two time series xi,j (nT )
strong relationship
and between
yi,j (nT ) ,the n =material
N, . . . N +distribution
M − 1 can bechanges
applied: coming from the X plane
and Y one exists, and the cross-correlation function , ( ) of the two time series
, ( ) and , ( ) , n = N, … N +1MN + − M1−can
1 be applied:
Ri,j (kT ) =
M ∑ xi,j (nT )yi,j ((n − k ) T ), k = . . . , −1, 0, 1 . . . (1)
1 −1 n= N
,( )= ∑ = ,( ) , (( − ) ), = ⋯ , −1,0,1 … (1)
where M is the number of frames determining the time window considered in the calculations.
where M is the number of frames
The founded determining
maximum of thethe time window
cross-correlation considered
Rmax inthe
determines thetime
calcu-
delay τ0 in
lations. a frame rate between the two signals representing material change distributions. Then,
The foundeda velocity
maximumVi,j of
of the
theflow in (i, j) pixel of
cross-correlation thedetermines
Rmax cross-section calculated
the in timeinwindow
time delay
[N, N +the
a frame rate between M] two
is given by the
signals formula:
representing material change distributions. Then, a
d
velocity , of the flow in (i, j) pixel of the cross-section Vi,j =calculated in time window [N, N (2)
τ0
+ M] is given by the formula:
It is worth nothing that it is an average velocity of material propagation in the time
, =
window, for instance, in the frame [N, N + M]. (2)
The changes in the concentration of the pneumatic flow material measured in the
It is worth vertical
nothingpipethatsection
it is anhave a characteristic
average velocity ofshape, namely
material quasi-regular
propagation pulses
in the timesimilar to
rectangular ones. In terms
window, for instance, in the frame [N, N + M]. of fluid mechanics, plug flow is a basic model describing a
material flowing in a pipe. In plug flow, the velocity of the
The changes in the concentration of the pneumatic flow material measured in the fluid is assumed to be constant
across any cross-section of the pipe perpendicular to the axis of the pipe. Such a plug
vertical pipe section have a characteristic shape, namely quasi-regular pulses similar to
flow model assumes that there is no boundary layer adjacent to the inner wall of the pipe.
rectangular ones. In terms of fluid mechanics, plug flow is a basic model describing a ma-
For instance, Figure 2 shows the chosen time interval of typical normalized concentration
terial flowing inchanges
a pipe.inIntheplug
chosenflow, the
pixel of velocity of the fluid
the tomographic images isfor
assumed to beconveying,
a pneumatic constant where 0
across any cross-section
corresponds of the
to anpipe perpendicular
empty pipe and 1 meansto the
theaxis of the
highest pipe. concentration
material Such a plug flow
(to normalize
model assumes material
that there is no boundary
concentration, layer adjacent
the calibration to the
procedure inner wall of the pipe. For
is required).
instance, Figure 2 shows the chosen time interval of typical normalized concentration
changes in the chosen pixel of the tomographic images for a pneumatic conveying, where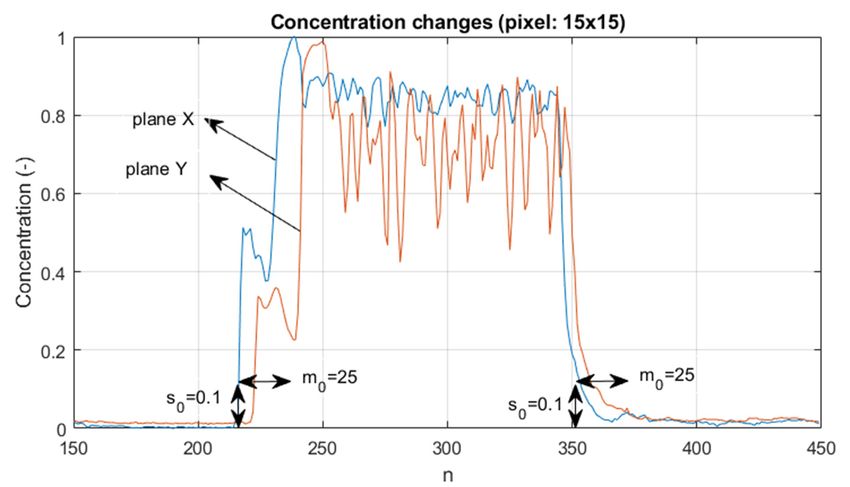
signal patterns. Hence, the velocity calculation should consider choosing the appropriate
signal patterns of time series , ( ) and , ( ), i.e., determination of a time window.
Since the plug propagation time is not constant, the choice of a time window with a
fixed length M is not possible. In addition, plugs appear irregularly, therefore, there is a
Sensors 2021, 21, 2189 problem: How to automatically determine the time of appearance of the plug and its4 fin-of 13
ishing. Hence, the algorithm for determining the velocity based on Equation (1) should
automatically detect the moments of plug occurrence.
(a) (b)
Figure
Figure2.2.Normalized
Normalized concentration
concentration changes within aa chosen
changes within chosenpixel
pixel(15,15)
(15,15)ofofthe
thetomographic
tomographicimages
im-
ages (a) and the image captured by a high speed camera (#220–#320) (b); s0—some threshold level
(a) and the image captured by a high speed camera (#220–#320) (b); s0 —some threshold level and
and m0—the arbitrarily chosen number of frames.
m0 —the arbitrarily chosen number of frames.
Applying simple
As mentioned thresholding
in Mosorov et al. to determine
2020 [11], thethe time moments
estimation is not
of the time possible
delay betweenduetwo
to
the fact that there can be a high probability of short pulses which are not suitable
time signals requires fulfilling the condition of their correlability. The notion of correlability for de-
termining the material
of input signals means velocity
that the by the correlation
calculated method due
cross-correlation to their
function willshort duration.
allow Such
determining
aacase can be described
dependency between as theimpulsive
analyzednoise in terms
signals. of signal processing
The correlability is strictly notions.
connected with a
In Mosorov
problem et al. 2020
determining [11],window
the time the algorithm to determine
to the calculation of the
the time interval is proposed.
cross-correlation function.
ItThis
includes the following steps:
means that the choice of the time window depends on the considered signal patterns.
1.Hence, the velocity
Choose arbitrarilycalculation shouldvalue
the threshold consider choosing the appropriate
s0 experimentally signal
and an interval patterns of
of confidence
timemseries xi,j (nTm)0 and
0T, where yi,j (arbitrarily
is the nT ), i.e., determination
chosen number of aoftime window.
frames. It is assumed that the
Since the values
threshold plug propagation
must be above time is known
the not constant, the choice of a time window with
noise level.
a fixed length M is
2. Waiting when the signal ,not possible. (In )
addition,
or , ( )
plugs appear
is is below irregularly, therefore,
the threshold value sthere
0. is
3. If the signal value , ( ) or , ( ) exceeds the threshold value s0 during the con-
a problem: How to automatically determine the time of appearance of the plug and its
finishing.
fidence Hence,
intervalthe[Nalgorithm
bT, NbT +for determining
m0T], then moment the velocity
NbT − mbased on Equation
0T determines (1) should
the beginning
automatically
of the signal detect the moments of plug occurrence.
pattern.
4. If the signal value thresholding
Applying simple
, ( ) to determine
, ( ) is below the
thetime moments
threshold is not
values possible due
0 during the in-
to the
terval of confidence [NeT, NeT + m0T], then moment NeT + m0T is chosen assuitable
fact that there can be a high probability of short pulses which are not the endfor
of
determining the
the signal pattern.material velocity by the correlation method due to their short duration.
5.SuchThe
a case cancorrelation
cross be described as impulsive
function noise as
is calculated in follows:
terms of signal processing notions.
In Mosorov et al. 2020 [11], the algorithm to determine the time interval is proposed.
It includes the following steps:
1. Choose arbitrarily the threshold value s0 experimentally and an interval of confidence
m0 T, where m0 is the arbitrarily chosen number of frames. It is assumed that the
threshold values must be above the known noise level.
2. Waiting when the signal xi,j (nT ) or yi,j (nT ) is below the threshold value s0 .
3. If the signal value xi,j (nT ) or yi,j (nT ) exceeds the threshold value s0 during the
confidence interval [Nb T, Nb T + m0 T], then moment Nb T − m0 T determines the
beginning of the signal pattern.
4. If the signal value xi,j (nT ) or yi,j (nT ) is below the threshold value s0 during the
interval of confidence [Ne T, Ne T + m0 T], then moment Ne T + m0 T is chosen as the end
of the signal pattern.
5. The cross correlation function is calculated as follows:
Ne + M0
1
Ri,j (kT ) =
Ne − Nb + 2M0 ∑ xi,j (nT )yi,j ((n − k) T ), k = . . . , −1, 0, 1 . . . (3)
n= Nb − M0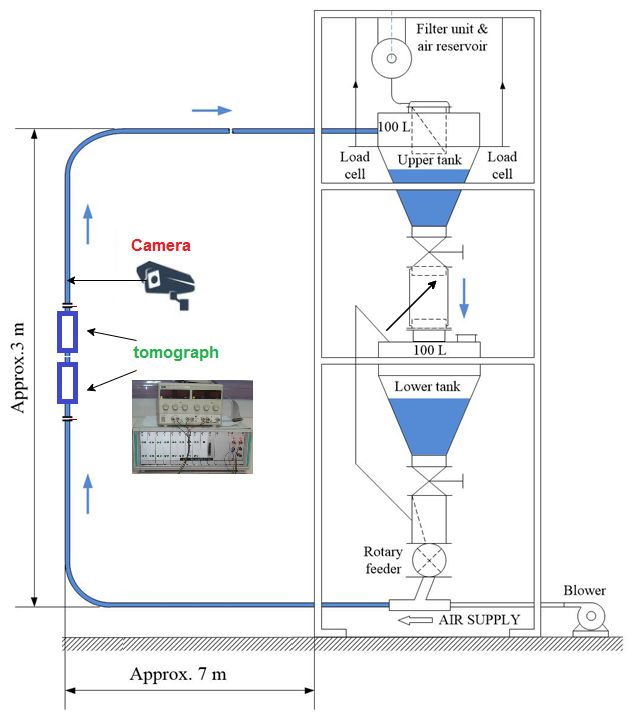
, ( )= ∑ , ( ) , (( − ) ), = ⋯ , −1,0,1 … (3)
6. Finally, the velocity of the flow in (I,j) pixel is calculated according to Equation (2),
during the interval [NeT, NeT + m0T]:
Sensors 2021, 21, 2189 5 of 13
, |[ , ] = (4)
7. Return to step 2 where n = Ne, i.e., starting from the moment of the interval when the
signal , ( ) , ( ) is below the threshold value s0.
6. Finally, the velocity of the flow in (I,j) pixel is calculated according to Equation (2),
In practice,
during it is unnecessary
the interval [Ne T, Ne Tto +m combine
0 T]:
two signal values , or , and it has to
choose one of them. In the article, such a basic signal is , . However, there are no studies
showing how the rightness of the velocity Vi,j|[ Ne T,calculation willd depend on the choice of s0 and
Ne T + M0 T ] = (4)
m0 parameters. Therefore, the next section describes the carried τ0 out studies regarding the
estimation of influence of these parameters on the rightness of velocity calculation and
7. Return
finding to step
the best 2 where
values for the n =calculation
Ne , i.e., starting from the moment of the interval when the
procedure.
signal xi,j ( Ne T ) or yi,j ( Ne T ) is below the threshold value s0 .
3. Experiments
In practice,and unnecessary to combine two signal values xi,j or yi,j and it has to
it isDiscussion
choose
The measurementthe
one of them. In article,
is made such
with ana electrical
basic signal is xi,j . However,
capacitance there are
tomography unitno
bystudies
meas-
showing how the rightness of the velocity calculation will depend on the choice of s0 and
uring the value of the electric capacity between successive pairs of electrodes Nel. Elec-
m0 parameters. Therefore, the next section describes the carried out studies regarding the
trodes are placed around the pipe at an equal distance, as shown in Figure 3. The meas-
estimation of influence of these parameters on the rightness of velocity calculation and
urement output has the form of the vector where its elements stand for consecutive elec-
finding the best values for the calculation procedure.
trode pairs:
3. Experiments and Discussion V = [ 1.0073 … 1.0114].
The measurement is made with an electrical capacitance tomography unit by measuring
The number of electrode pairs Nel can be calculated as follows:
the value of the electric capacity between successive pairs of electrodes Nel . Electrodes are
( )
placed around the pipe at an equal distance, =as shown in Figure 3. The measurement output(5)
has the form of the vector where its elements stand for consecutive electrode pairs:
where ne is the number of electrodes.
V = of1.0073
In our experiment, the number . . .ne is
electrodes 1.0114 .
8 and hence, the number of electrode
pairs Nel is 28.
(a) (b)
Figure 3.
Figure 3. Electrical
Electrical capacitance
capacitance tomography
tomographymeasurement
measurementunitunitand
andsensor
sensorplacing
placingon
onthe
thepipe
pipe(a).
(a).
On the right hand, the cross-section of the pipe is presented with electrodes (e1, e2 …) mounted
On the right hand, the cross-section of the pipe is presented with electrodes (e1, e2 . . . ) mounted
around the pipe (b).
around the pipe (b).
The number
The process of
of obtaining a tomogram,
electrode pairs thecalculated
Nel can be graphicalasrepresentation
follows: of reconstructed
tomographic data requires several stages, which include: Data acquisition from tomo-
graphic sensors, device calibration (determining − 1range
ne (ne the ) of the minimum and maximum
Nel = (5)
value for the process, normalization of measurement
2 data, preparation of the sensitivity
matrix, and reconstruction of the tomographic image).
where ne is the number of electrodes.
One of the ECT data processing stages is to perform an image reconstruction algo-
In our experiment, the number of electrodes ne is 8 and hence, the number of electrode
rithm that allows preparing the pipe cross-section view. There are many such methods.
pairs Nel is 28.
However, despite the lower quality, the most frequently used method in real-time systems
The process of obtaining a tomogram, the graphical representation of reconstructed to-
mographic data requires several stages, which include: Data acquisition from tomographic
sensors, device calibration (determining the range of the minimum and maximum value
for the process, normalization of measurement data, preparation of the sensitivity matrix,
and reconstruction of the tomographic image).
One of the ECT data processing stages is to perform an image reconstruction algorithm
that allows preparing the pipe cross-section view. There are many such methods. However,
despite the lower quality, the most frequently used method in real-time systems is the linearSensorsSensors
2021, 21, x FOR
2021, 21, x PEER REVIEW
FOR PEER REVIEW 6 of 13 6 of 13
Sensors 2021, 21, 2189 6 of 13
is the
is the linear
linear backprojection
back projection (LBP)
(LBP) method
method[25,26]
[25,26]due
dueto to
thethelowlow
costcost
of computing.
of computing.The The
back
methodprojection
of linear(LBP)
back method
projection[25,26]
is a due to the
method low costtoofthe
belonging computing.
group of The method
inverse of
problem
method of linear back projection is a method belonging to the group of inverse problem
linear back
solution projection
[27], allowing is to
a method
calculatebelonging to the
more result group
data thanofthe
inverse
amountproblem solution
of input data. [27],
This
solution [27], allowing to calculate more result data than the amount of input data. This
allowing to calculate
method includes more result
calculating data than
all points thetomogram
of the amount ofusing
input thedata. This method
so-called includes
sensitivity ma-
method includes
calculating all calculating
points of the all pointsusing
tomogram of the
thetomogram
so-called using thematrix.
sensitivity so-called
Thissensitivity
structure ma-
trix. This structure is based on a predefined N-element image table, where each element
trix.
is This structure
based on a to
corresponds
is based
predefined on ofa predefined
N-element
the distribution
N-element
imagecapacitance
electric table, where eachimage
between elementtable, where
corresponds
two sensor
each
electrodes.
element
to Part
the
corresponds
distribution to the distribution
of electric
of the sensitivity matrix capacitanceof electric
with examplebetween capacitance
pairs two between
sensor electrodes.
of electrodes two
are shownPart sensor electrodes.
sensitivity Part
of the 4.
in Figure
of matrix
the sensitivity matrix
with example pairswith example pairs
of electrodes of electrodes
are shown in Figure 4.are shown in Figure 4.
Figure 4. Visualization of sensitivity matrix parts, an example. The red color stands for amplified values between pairs of
electrodes.
Figure
Figure 4. Visualization
4. Visualization of sensitivity
of sensitivity matrix
matrix parts,an
parts, anexample.
example. The
The red
red color
color stands
standsfor
foramplified
amplifiedvalues between
values pairs
between pairs of
of electrodes.
electrodes. The sensitivity matrix is a graphical representation of the electric capacitance distri-
bution between the electrodes, which results in the amplification effect of the values be-
The sensitivity matrix is a graphical representation of the electric capacitance dis-
The the
tween sensitivity matrix
electrodes, whileisweakening
a graphicaltherepresentation
signal’s influence of theon electric
the central capacitance
area of thedistri-
tribution between the electrodes, which results in the amplification effect of the values
analyzed
bution betweenplane.theTheelectrodes,
size of eachwhichsensitivity
resultsmatrix
in image
the is equal to 32
amplification × 32 of
effect pixels
theofof the
values
between the electrodes, while weakening the signal’s influence on the central area the be-
same
tween dimensions,
the electrodes, as a result,
while a reconstructed
weakening the image.
signal’s The output
influence is obtained
on32the thanks
central area to
analyzed plane. The size of each sensitivity matrix image is equal to × 32 pixels of theof the
Equation
analyzed (6):
plane. Theassize of each sensitivity matrix
same dimensions, a result, a reconstructed image.image is equal
The output to 32 × 32
is obtained pixels
thanks to of the
same dimensions,
Equation (6): as a result, a reconstructed = × image. ∗ The output is obtained thanks (6) to
Equation (6): I MG Mx1 = S− 1
×M ∗ C Lx1 (6)
where M is the ECT image resolution, L is theLvector size of one ECT measurement, CLx1 is
where
the ECT M is the ECT image
measurement resolution,
vector, L is
SL×M is thesensitivity
the vector
= × ∗of one ECT
size matrix, and measurement, CLx1 is the
IMG is the tomographic (6)
ECT
image. measurement vector, SL×M is the sensitivity matrix, and IMG is the tomographic image.
where ThereM is the
There areECT
are many
many image
numerical resolution,
numerical problems
problems Lassociated
isassociated
the vectorwith size
thethe
with ofsensitivity
one ECT
sensitivity measurement,
matrix. This
matrix. ma-CLx1 is
matrix
This
theistrix
notisanot
ECT square matrix.
measurement Its dimensions
vector, S depend
is the on the
sensitivitynumber of
matrix, independent
a square matrix. Its dimensions depend on the number of independent meas-
L×M and IMG measurements
is the tomographic
and
image. from aand
urements significantly greater number
from a significantly greaterof image
number points.
of imageHence, it is impossible
points. Hence, it isto calculate
impossible
the inverse
to There
calculate of
arethe matrices
inverse
many and in various
of matrices
numerical known
and in various
problems methods
associatedknown the
with pseudo-reverse
methods of the
the pseudo-reverse
the sensitivity matrix. image of ma-
This
reconstruction
the image is used.
reconstruction The isproblem
used. is
The considered
problem is as ill-conditioned.
considered as In the
ill-conditioned.LBP algorithm,
In the LBP
trix is not a square matrix. Its dimensions depend on the number of independent meas-
the pseudo-inverse
algorithm, the sensitivity matrix
pseudo-inverse is computedisthrough
sensitivity its transpositions.
urements After
and from a significantly greatermatrix
number computed
of image through
points. its transpositions.
Hence, it is impossible
After performing the image reconstruction algorithm, the cross-section image
performing the image reconstruction algorithm, the cross-section image is is ob-
ob-
to tained
calculate the inverse
(Figure 5a). of matrices and in various known methods the pseudo-reverse of
tained (Figure 5a).
the image reconstruction is used. The problem is considered as ill-conditioned. In the LBP
algorithm, the pseudo-inverse sensitivity matrix is computed through its transpositions.
After performing the image reconstruction algorithm, the cross-section image is ob-
tained (Figure 5a).
(a) (b)
Figure 5.
Figure 5. Reconstructed
Reconstructed ECT
ECT image
image (a)
(a) and
and the
the photography
photographythat
thatpresents
presentsthe
thematerial
materialinside
insidethe
the
pipe. (b) The red color shows the material inside the pipe, and the black color represents an empty
pipe. (b) The red color shows the material inside the pipe, and the black color represents an empty
part of the pipe. On the right hand, (b) the image of the pipe section is presented.
part of the pipe. On the right hand, (b) the image of the pipe section is presented.
(a) (b)
Figure 5. Reconstructed ECT image (a) and the photography that presents the material inside the
pipe. (b) The red color shows the material inside the pipe, and the black color represents an empty
part of the pipe. On the right hand, (b) the image of the pipe section is presented.stances in the transport route or the distribution of material concentration in the cross-
section of the tank during industrial processes. Despite the low quality, the accuracy of
concentration changes is determined at the level of about 3%.
The research was based on a two-phase pneumatic gas-bulk material flow. The
Sensors 2021, 21, 2189 equipment configuration includes two 100 L tanks placed one below the other, 7 of 13a rotary
feeder, a pump, piping in the horizontal section (2 × 7 m ) and vertical (approx. 3 m), as
2
shown in Figure 6. Stainless steel piping was used with a diameter of Ø1 = 57 mm (inner).
In the uppertopart
Thanks ECT,ofusing
the installation, there itisisa possible
the LBP method, filter that
to separates
determine the the phase
number ofofthe loose
material from the gaseous medium. A polymer granulate with a size
substances in the transport route or the distribution of material concentration in the cross-of 3 mm × 3 mm × 1
mm and
section of athe
dielectric
tank duringpermittivity
industrial of approximately
processes. Despite the 2.1 low
wasquality,
adopted the as the transported
accuracy of
substance
concentration(Jaworski
changesand Dyakowski
is determined 2001)
at the [28].
level of about 3%.
The research
As seen was based
in Figure on tomographic
6, the a two-phase pneumatic
sensors gas-bulk
have been material flow.inThe
installed theequip-
vertical sec-
mentEach
tion. configuration
of them includes
consiststwo 100 Lelectrodes
of eight tanks placed one below
placed the other,
at equal a rotary
intervals feeder,
on the outer wall
a pump, piping in the horizontal section (2 × 7 m 2 ) and vertical (approx. 3 m), as shown in
(electrode width 30 mm). The distance between them is constant and was d = 130 mm. The
Figure 6. Stainless steel piping was used with a diameter of Ø1 = 57 mm (inner). In the
measurement was made using the mentioned tomographic unit with a sampling fre-
upper part of the installation, there is a filter that separates the phase of the loose material
quency
from the of 100 Hz.
gaseous The gas
medium. velocity
A polymer (for anwith
granulate empty pipe)
a size can ×vary
of 3 mm 3 mm from 1.0 to
× 1 mm and 5 m/s by
inserting three different nozzles and the pressure control. It follows
a dielectric permittivity of approximately 2.1 was adopted as the transported substance from the above that
the highest
(Jaworski and achievable
Dyakowskimaterial velocity is 5 m/s.
2001) [28].
Figure 6. Pneumatic
Figure 6. Pneumaticmaterial
material conveying
conveying system
system schema
schema withwith tomography
tomography sensors
sensors andcam-
and video video cam-
era
era placement.
placement.
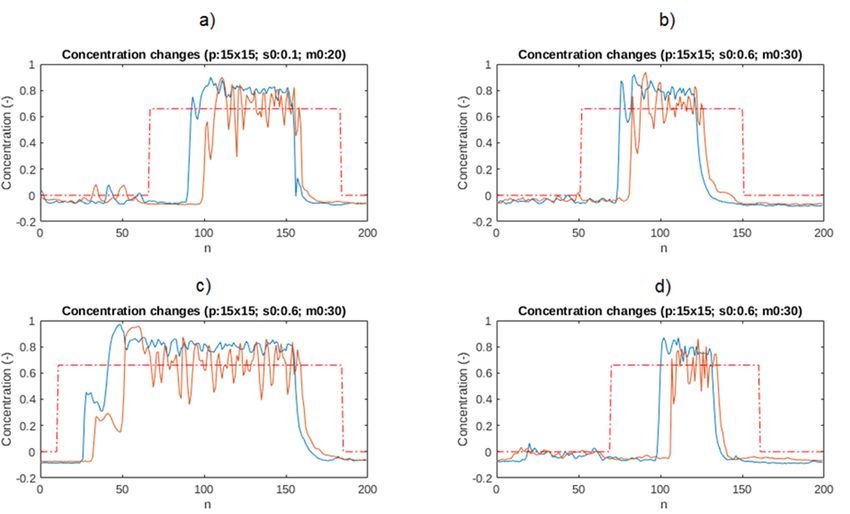
As seen in Figure 6, the tomographic sensors have been installed in the vertical
section. Each of them consists of eight electrodes placed at equal intervals on the outer
wall (electrode width 30 mm). The distance between them is constant and was d = 130 mm.
The measurement was made using the mentioned tomographic unit with a sampling
frequency of 100 Hz. The gas velocity (for an empty pipe) can vary from 1.0 to 5 m/s bySensors
Sensors 21, x21,
2021,2021, FOR2189
PEER REVIEW 8 of 13 8 of 13
inserting
As part three different
of the nozzles the
experiment, andacquisition
the pressureofcontrol. It followsvalues
measurement from thewasabove that
performed us-
the highest achievable material velocity is 5 m/s.
ing a tomographic sensor from two planes, and then the data were processed according
As part of the experiment, the acquisition of measurement values was performed
tousing
the steps shown in sensor
a tomographic Figurefrom
1. The twomain parts
planes, andofthen
thethe
algorithm
data were are the plugs
processed identification
according
section and the
to the steps cross-correlation
shown in Figure 1. The module.
main partsWhen the measurement
of the algorithm are the plugssamples arrive at the
identification
plug identification module, the s
section and the cross-correlation module. When the measurement samples arrive at the Then,
0 threshold is used to determine if the plug appears.
if plug
the higher material
identification concentration
module, the s0 thresholdis recorded
is used in the periodif greater
to determine the plug than m0 (confidence
appears. Then,
if the higher
threshold), thematerial concentration
plug beginning is recorded
is indicated. Thein the
opposite greater thanismperformed
periodprocedure 0 (confidencefor plug
threshold), the plug beginning is indicated. The opposite procedure
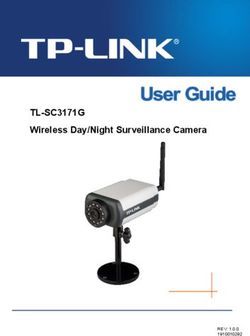
end determination. Figure 7 presents example graphs showing changes in the concentra- is performed for plug
endvalue
tion determination.
in the pipe Figure 7 presents example
cross-section based on graphs
a 15showing
× 15 pixelchanges in the concentration
of tomographic images from
value in the pipe cross-section based on a 15 × 15 pixel of tomographic images from two
two planes and the result of the discussed plug identification algorithm to parameters s0,
planes and the result of the discussed plug identification algorithm to parameters s0 , m0 .
m0As. As can be seen, the pattern of the time range (dotted red line) covers the time range of
can be seen, the pattern of the time range (dotted red line) covers the time range of plug
plug appearance
appearance (blue(blue line) completely.
line) completely.
Figure 7. Plug
Figure identification
7. Plug identification algorithm
algorithmoutput
output for severalcases.
for several cases.The
Thesignal
signal from
from thethe second
second planeplane is presented
is presented with an
with an
orange color.
orange TheThe
color. dotted
dotted lines
linespresent
presentranges of computed
ranges of computedpatterns:
patterns:
(a)(a) Shows
Shows patterns
patterns where
where s0 =and
s0 = 0.1 0.1mand m0 = 20; (b–d)
0 = 20; (b–d)
shows patterns
shows with
patterns s0 =s00.6
with and
= 0.6 andm0m=0 30.
= 30.
Thediscussed
The discussed algorithm,
algorithm, together withwith
together arbitrarily set parameters,
arbitrarily apparently
set parameters, indicates indi-
apparently
the correct speed estimates. However, there are situations when the obtained
cates the correct speed estimates. However, there are situations when the obtained values arevalues
inconsistent with reality. One of the reasons for the occurrence of inappropriate estimates
are inconsistent with reality. One of the reasons for the occurrence of inappropriate esti-
is the reliance on incorrect algorithm arguments. The analysis of the plug registration
mates is the reliance on incorrect algorithm arguments. The analysis of the plug registra-
threshold s0 impact on the plugs identification algorithm effectiveness was performed.
tion
Thethreshold s0 impactinon
results are presented the 8a,b.
Figure plugs identification algorithm effectiveness was per-
formed. Using the parameters s0 = 0.35inand
The results are presented Figure
m0 =8a,b.
5, an additional wrong plug is detected
(Figure 8a). It results from the occurrence of situations where the instantaneous fluctua-
tions of the concentration level exceed the indicated threshold and remain above m0 = 5
units. In such a situation, a signal pattern is generated, where the maximum correlation
reaches the value of n = 21 (wrong velocity value eq. 0.62 m/s). The plug identification
algorithm requires proper parameter setting that would enable the correct speed estima-
tion. The authors conducted a series of experiments that allow indicating the right values.
The results are shown in Figure 9.SensorsSensors 2021,
2021, 21, 21, 2189
x FOR PEER REVIEW 9 of 139 of 13
(a)
(a)
(b)
Material velocity estimation chart in relation to the parameter s0 for each plug. The different colors represent
0: (a) Full data, (b) removed data for s0 = 0.35 m, and plug number 9.
Using the parameters s0 = 0.35 and m0 = 5, an additional wrong plug is detected (Fig-
ure 8a). It results from the occurrence of situations where the instantaneous fluctuations
of the concentration level exceed the indicated threshold and remain above m0 = 5 units.
In such a situation, a signal pattern is generated, where the maximum correlation reaches
the value of n = 21 (wrong velocity value eq. (b)0.62 m/s). The plug identification algorithm
8.requires
FigureFigure
Material proper
velocity
8. Material
parameter
estimation
velocity estimation
setting
chart
chart
that would
ininrelation
relation toto the
enable sthe
parameter
the parameter 0s0for
correct
for each
each
speed
plug.
plug.
estimation.
TheThe different
different
Therepresent
colors
colors represent
parameter authors
parameter conducted
s0: (a)s0Full
: (a) data,data,
Full (b) (b)a removed
seriesdata
removed ofdata
experiments
fors0s0= =0.35
for 0.35m,that
m,and allow
and plug indicating
number
plug number 9.9. the right values. The re-
sults are shown in Figure 9.
Using the parameters s0 = 0.35 and m0 = 5, an additional wrong plug is detected (Fig-
ure 8a). It results from the occurrence of situations where the instantaneous fluctuations
of the concentration level exceed the indicated threshold and remain above m0 = 5 units.
In such a situation, a signal pattern is generated, where the maximum correlation reaches
the value of n = 21 (wrong velocity value eq. 0.62 m/s). The plug identification algorithm
requires proper parameter setting that would enable the correct speed estimation. The
authors conducted a series of experiments that allow indicating the right values. The re-
sults are shown in Figure 9.
(a) (b)
Figure
Figure 9. (a)9.Analysis
(a) Analysis of the influence
of the influence of parameters
of parameters s0 , m0 on thes0number
, m0 on of
theidentifiable
number of identifiable
plugs plugs (red
(red line—expected value);
line—expected
(b) absolute value);
error for the (b) absolute
correlation function error for thetocorrelation
with respect parameters s0function withof
, m0 . The color respect to parameters
circles indicates s0,of m0
the value
m0. The(the
parameter color
scaleofiscircles
shown indicates
on the rightthe value of m0 parameter (the scale is shown on the right hand).
hand).
(a) (b)
Figure 9. (a) Analysis of the influence of parameters s0, m0 on the number of identifiable plugs (red
line—expected value); (b) absolute error for the correlation function with respect to parameters s0,Sensors 2021, 21, 2189 10 of 13
The conducted experiments show unequivocally that the use of the right algorithm
parameters is crucial when assessing its effectiveness. For the real data series, which shows
the passage of 20 plugs (Figure 9a red line), it is noticeable that for the threshold s0 ≥ 0.75
the number of identified plugs does not reach the expected value and additionally shows
an extreme influence of the m0 parameter. Moreover, for a value of s0 ≤ 1, a similar
situation exists.
On the other hand, if there is a higher s0 threshold, then a lower m0 parameter should
be set to return the required number of plugs. Additionally, reducing the m0 allows
identifying more plugs.
The second experiment was performed in order to visually estimate the signal time
shifts (p) for successive plugs. Then, results were taken as reference values to calculate the
root of mean square error (RMSE); Equation (7)) for the algorithm with respect to s0 , m0 .
s
2
∑nPn=1 ( p̂ − p(n))
RMSE = , (7)
Pn
where Pn is the plug count; n is the plug number; p(n) is the time shift for n-th plug
between planes; p̂ is the expected time shift (visual analysis).
As a result of the analysis, the diagram (see Figure 9b) was obtained. The reference
data (visual analysis) may be inaccurate. Therefore, the values on the graph fluctuate
around RMSE = 1. It is noticeable that for low m0 and high s0 values, the estimation error
is lower. Based on the above analyses, it can be assumed that the best parameters of the
discussed algorithm are s0 = 0.6 and m0 = 10.
Another aspect of the algorithm’s efficiency is the speed estimation error based on the
correlation result resolution. The maximum speed that can be obtained with the indicated
measurement parameters of the system equals n1 = 13 m/s (where n = 1 indicates the
number of units of shifting the signals between two measurement planes). The follow-
ing values are: n1 = 13 m/s, n2 = 6.5 m/s, n3 = 4.3 m/s, n4 = 3.25 m/s, n5 = 2.6 m/s,
n6 = 2.17 m/s, n7 = 1.86 m/s, etc. Hence, the speed estimation error resulting from the
erroneous calculation of the maximum value of the correlation increases with the increase
in speed, reaching the maximum absolute value equal to v > 13 m/s (100%). In the current
experiment, where the velocity of the medium is known, it is expected to obtain the plug
velocity v < 6.5 m/s, which gives an error of 51%, and for the value of v = 2.17 m/s (n = 6),
respectively 17%.
The authors conducted an algorithm accuracy analysis. The first step was to check
the changes in the estimated velocity to the parameter s0 . It was expected to show that
different velocity estimates were obtained for different threshold values. In the second
step, an error resulting from the estimation using of the considered algorithm to visual
measurements was demonstrated.
The results of the experiments are presented in Figure 10. The top chart (a) shows the
relative error from the elaborated algorithm.
The analysis proves that for a low threshold (smaller than 0.4) and higher than 0.7
results are not stable. Contrary, the center values give constant velocity estimation that
allows us to assume this range as correct. On the lower plot, the error rate was calculated
based on the reference measurement performed as a visual analysis. Same as above,
a threshold greater than 0.4 gives better results. For the discussed case, the average error
oscillates around 13.3% and the maximum error reaches up to 33.3%.The authors conducted an algorithm accuracy analysis. The first step was to check
the changes in the estimated velocity to the parameter s0. It was expected to show that
different velocity estimates were obtained for different threshold values. In the second
step, an error resulting from the estimation using of the considered algorithm to visual
Sensors 2021, 21, 2189 measurements was demonstrated. 11 of 13
The results of the experiments are presented in Figure 10. The top chart (a) shows the
relative error from the elaborated algorithm.
Sensors 2021, 21, x FOR PEER REVIEW 11 of 13
(a)
(b)
Figure 10.10.
Figure Plug identification
Plug identificationalgorithm
algorithmthreshold
thresholdvalue
value impact on the
impact on the velocity
velocityestimation
estimationaccuracy.
accuracy. The
The plot
plot onon
thethe
toptop
(a) (a)
shows the relative error for s0 = 0.7 as a reference (expected value). The relative error based on the visual analysis as a
shows the relative error for s0 = 0.7 as a reference (expected value). The relative error based on the visual analysis as a
reference is shown beneath (b).
reference is shown beneath (b).
The analysis proves that for a low threshold (smaller than 0.4) and higher than 0.7
4. Conclusions
results are not stable. Contrary, the center values give constant velocity estimation that
allowsAlthough
us to assumean ECTthistomograph
range as correct.
system Oncanthe lower plot, the
be successfully errortorate
utilized was calculated
determine a ve-
locityon
based profile in multiphase
the reference flow, however,
measurement there still
performed as is a lack of
a visual the efficient
analysis. Same algorithms
as above, a
implemented
threshold in such
greater thana 0.4
system
givesto better
calculate the velocity
results. For the profile in the right
discussed case, way. It is shown
the average error
that the key factor is the choice of appropriate time
oscillates around 13.3% and the maximum error reaches up to 33.3%. intervals for velocity calculations.
This carried out research concerns the study of dependence between the threshold level
4.parameters
Conclusions of signal pattern detection and rightness of the calculated velocity values. It is
shown that these threshold level parameters have a major influence on the appropriate
plugAlthough
detection, anasECT
welltomograph system can be successfully
as on the cross-correlation utilized
result that stands fortoaccurate
determine a ve-
veloc-
locity profile in multiphase flow, however, there still is a lack of the efficient
ity estimation. In this article, a use case is presented which proves the relation between algorithms
implemented in such
the s0 threshold and athesystem to calculate
m0 parameter thein
given velocity profile inalgorithm.
the elaborated the right way. It is shown
The larger s0 ,
that the
then key factor
smaller m0 mustis thebechoice of appropriate
to obtain a valid counttime intervals
of plugs. for velocity
Additionally, the calculations.
correlation out- This
carried out determined
put is also research concerns the study
by a threshold of For
value. dependence
the range between
of s0 = ,
threshold level pa-
the algorithm
rameters
gives theoflowest
signalerror
pattern detection
referring to theand rightness
visual analysis.of the calculated velocity values. It is
shownAlthough
that thesethethreshold
conducted level
study parameters
was obtainedhave
for gravity flowinfluence
a major experiments onand
the pneumatic
appropriate
conveying,
plug otherasstudies
detection, well as can
onalso
thebecross-correlation
valuable for flowsresult
with different tomographic
that stands modalities.
for accurate velocity
estimation. In this article, a use case is presented which proves the relation between the s0
Author Contributions: Investigation, V.M. and G.R.; project administration, D.S.; resources, V.M.;
threshold and the m0 parameter given in the elaborated algorithm. The larger s0, then
writing—original draft, V.M. and G.R. All authors have read and agreed to the published version of
smaller m 0 must be to obtain a valid count of plugs. Additionally, the correlation output
the manuscript.
is also determined by a threshold value. For the range of s0 = , the algorithm gives
lowestThis
Funding:
the work
error was partly
referring funded
to the by the
visual Intelligent Development Operational Program 2014–
analysis.
2020 co-financed by the European Regional Development Fund, project POIR.04.01.02-00-0089/17-00.
Although the conducted study was obtained for gravity flow experiments and pneu-
Institutional
matic conveying,Review Board
other Statement:
studies Not applicable.
can also be valuable for flows with different tomographic
modalities.
Informed Consent Statement: Not applicable.
Author Contributions: Investigation, V.M. and G.R.; project administration, D.S.; resources, V.M.;
writing—original draft, V.M. and G.R. All authors have read and agreed to the published version
of the manuscript.
Funding: This work was partly funded by the Intelligent Development Operational Program 2014-Sensors 2021, 21, 2189 12 of 13
Data Availability Statement: Not applicable.
Conflicts of Interest: The authors declare no conflict of interest.
References
1. Zych, M.; Hanus, R.; Vlasák, P.; Jaszczur, M.; Petryka, L. Radiometric methods in the measurement of particle-laden flows. Powder
Technol. 2017, 318, 491–500. [CrossRef]
2. Saoud, A.; Mosorov, V.; Grudzien, K. Measurement of velocity of gas/solid swirl flow using Electrical Capacitance Tomography
and cross correlation technique. Flow Meas. Instrum. 2017, 53, 133–140. [CrossRef]
3. Wang, M. (Ed.) Industrial Tomography: Systems and Applications; Woodhead Publishing: Oxford, UK, 2015. [CrossRef]
4. Maung, C.O.; Kawashima, D.; Oshima, H.; Tanaka, Y.; Yamane, Y.; Takei, M. Particle volume flow rate measurement by
combination of dual electrical capacitance tomography sensor and plug flow shape model. Powder Technol. 2020, 364, 310–320.
[CrossRef]
5. Jaszczur, M.; Portela, L.M. Numerical Data for Reliability of LES for Non-Isothermal Multiphase Turbulent Channel Flow.
In Quality and Reliability of Large-Eddy Simulations; ERCOFTAC Series; 2008; Available online: https://www.springer.com/gp/
book/9781402085772 (accessed on 18 March 2021).
6. Kaipio, J.; Seppänen, A.; Vauhkonen, M.; Lipponen, A.; Voutilainen, A.; Lehikoinen, A.; Rimpiläinen, V. Process tomography and
estimation of velocity fields. In Industrial Tomography: Systems and Applications; Elsevier: Amsterdam, The Netherlands, 2015;
pp. 551–590. [CrossRef]
7. Mosorov, V. Improving the accuracy of single radioactive particle technique for flow velocity measurements. Flow Meas. Instrum.
2019, 66, 150–156. [CrossRef]
8. Romanowski, A. Contextual processing of electrical capacitance tomography measurement data for temporal modeling of
pneumatic conveying process. In Proceedings of the 2018 Federated Conference on Computer Science and Information Systems
(FedCSIS), Poznan, Poland, 9–12 September 2018; pp. 283–286. [CrossRef]
9. Chowdhury, S.; Marashdeh, Q.M.; Teixeira, F.L. Velocity Profiling of Multiphase Flows Using Capacitive Sensor Sensitivity
Gradient. IEEE Sens. J. 2016, 16, 8365–8373. [CrossRef]
10. Gunes, C.; Chowdhury, S.M.; Zuccarelli, C.E.; Marashdeh, Q.M.; Teixeira, F.L. Displacement-Current Phase Tomography for
Water-Dominated Two-Phase Flow Velocimetry. IEEE Sens. J. 2018, 19, 1563–1571. [CrossRef]
11. Mosorov, V.; Zych, M.; Hanus, R.; Sankowski, D.; Saoud, A. Improvement of Flow Velocity Measurement Algorithms Based on
Correlation Function and Twin Plane Electrical Capacitance Tomography. Sensors 2020, 20, 306. [CrossRef] [PubMed]
12. Beck, M.S.; Plaskowski, A. Cross Correlation Flowmeters Their Design and Application, 4th ed.; John Wiley: New York, NY, USA, 1987.
13. Bendat, J.S.; Piersol, A.G. Random Data: Analysis and Measurement Procedures, 4th ed.; John Wiley: New York, NY, USA, 2012.
[CrossRef]
14. Mosorov, V. A method of transit time measurement using twin-plane electrical tomography. Meas. Sci. Technol. 2006, 17, 753–760.
[CrossRef]
15. Zych, M.; Hanus, R.; Wilk, B.; Petryka, L.; Świsulski, D. Comparison of noise reduction methods in radiometric correlation
measurements of two-phase liquid-gas flows. Measurement 2018, 129, 288–295. [CrossRef]
16. Roshani, G.H.; Khazaei, A.; Nazemi, E.; Zych, M.; Hanus, R.; Mosorov, V. Density and velocity determination for single-phase
flow based on radiotracer technique and neural networks. Flow Meas. Instrum. 2018, 61, 9–14. [CrossRef]
17. Bolton, G.T.; Hooper, C.W.; Mann, R.; Stitt, E.H. Flow distribution and velocity measurement in a radial flow fixed bed reactor
using electrical resistance tomography. In Proceedings of the 3rd World Congress on Industrial Process Tomography, Banff,
Canada, 2–5 September 2003; pp. 813–820.
18. Feng, D.; Lei, H.; Xu, Y.; Hua, S. The use of ERT eigenvalue correlation to measure the gas-liquid two-phase flow in vertical pipe.
In Proceedings of the 4th World Congress on Process Tomography, Aizu, Japan, 5–8 September 2005; pp. 308–313. Available
online: https://www.researchgate.net/publication/289401107_The_use_of_ERT_eigenvalue_correlation_to_measure_the_gas-
liquid_two-phase_flow_in_vertical_pipe (accessed on 18 March 2021).
19. Henningsson, M.; Östergren, K.; Dejmek, P. Plug flow of yoghurt in piping as determined by cross-correlated dual-plane electrical
resistance tomography. J. Food Eng. 2006, 76, 163–168. [CrossRef]
20. Hunt, A.; Pendleton, J.D.; White, R.B. A novel tomographic flow analysis system. In Proceedings of the 3rd World Congress on
Industrial Process Tomography, Banff, AB, Canada, 2–5 September 2003; pp. 281–286.
21. Warsito, W.; Fan, L.-S. 3D-ECT Velocimetry for Flow Structure Quantification of Gas-Liquid-Solid Fluidized Beds. Can. J. Chem.
Eng. 2008, 81, 875–884. [CrossRef]
22. Fuchs, A.; Zangl, H.; Wypych, P. Signal modelling and algorithms for parameter estimation in pneumatic conveying. Powder
Technol. 2007, 173, 126–139. [CrossRef]
23. Wang, C.; Zhang, S.; Li, Y.; Jia, L.; Ye, J. Cross-Correlation Sensitivity-Based Electrostatic Direct Velocity Tomography. IEEE Trans.
Instrum. Meas. 2020, 69, 8930–8938. [CrossRef]
24. Rymarczyk, T.; Sikora, J. Applying industrial tomography to control and optimization flow systems. Open Phys. 2018, 16, 332–345.
[CrossRef]
25. Neumayer, M.; Zangl, H.; Watzenig, D.; Fuchs, A. Current Reconstruction Algorithms in Electrical Capacitance Tomography. Lect.
Notes Electr. Eng. 2011, 83, 65–106. [CrossRef]Sensors 2021, 21, 2189 13 of 13
26. Yang, W.Q.; Peng, L. Image reconstruction algorithms for electrical capacitance tomography. Meas. Sci. Technol. 2002, 14, R1–R13.
[CrossRef]
27. Mao, M.; Wang, J.; Ye, H.; Yang, W. Evaluation of Excitation Strategies for 3D ECT in Gas-solids Flow Measurement. IEEE Sens. J.
2016, 16, 8523–8530. [CrossRef]
28. Jaworski, A.J.; Dyakowski, T. Tomographic measurements of solids mass flow in dense pneumatic conveying. What do we need to
know about the flow physics? In Proceedings of the 2nd World Congress on Industrial Process Tomography, Hannover, Germany,
29–31 August 2001; pp. 353–360. Available online: https://pure.hud.ac.uk/en/publications/tomographic-measurements-of-
solids-mass-flow-in-dense-pneumatic-c-4 (accessed on 18 March 2021).You can also read