Robotics Engineering Notebook - VEX Robotics
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
Robotics
Engineering
Notebook
Team name TNT
Team number 70145A
Season Ringmaster
Start date 15/12/2017
End date
Book number 1 (English version)
1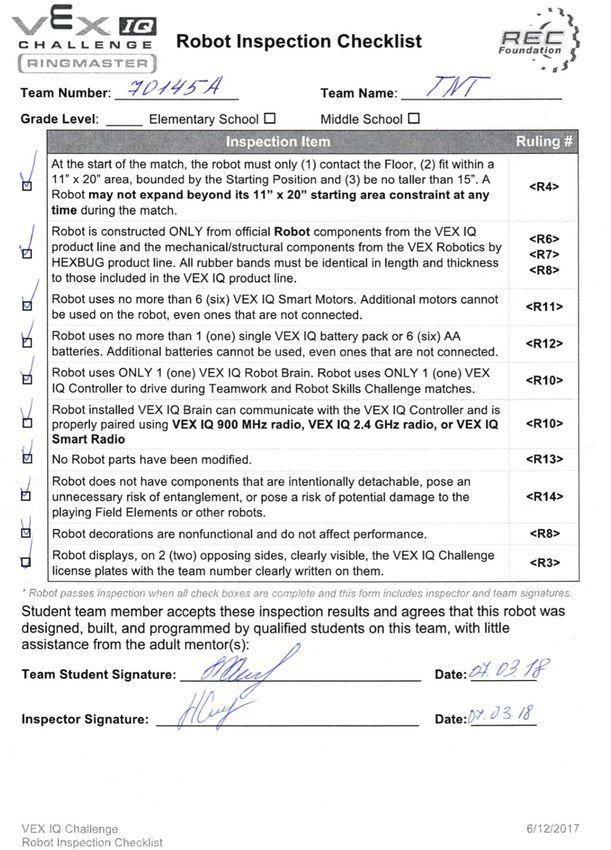
TEAM PHOTOS
➢ Katya (12 y.o., 7th grade) My hobby is robotics and drawing. I spend
a lot of time being engaged in these activities. I like to draw portraits in
fantasy style and fantastic animals.
➢ Artem (13 y.o., 7th grade) I'm engaged in programming and
robotics. I like sports, ride bycicle and play football.
➢ Sasha (11 y.o., 5th grade) Rubik's Cube is my hobby. I have large
collection of Rubik's Cubes: 3x3 Rubik's Cube, Magic Rubik's Cube, Rubik's
Pyramid. My record 3x3 Rubik's Cube is 43 seconds.
➢ Olya (14 y.o., 7th grade) My hobbies are dancing and programming.
And I collect teddy bears and unicorns. I have about 60 toys in my collection at
this moment.
2
PROJECT INFORMATION
Page Project development Date
4 Planning 15.12.2017
6 Study the rules 18.12.2017
10 Modeling of the construction 20.12.2017
12 Programming 22.12.2017
15 Testing 25.12.2017
16 Modeling of the robot 27.12.2017
20 Programming 17.01.2018
24 Modification of the robot 20.01.2018
26 Programming 22.01.2018
28 Testing 24.01.2018
31 Programming 03.02.2018
35 Modeling of the robot 05.02.2018
40 Programming 10.02.2018
43 Operators’ practice 12.02.2018
45 Autonomousperiod debugging 16.02.2018
46 Operators’ practice 19.02.2018
47 Modeling of the robot 21.02.2018
48 Presentation of the project 26.02.2018
50 Imitation of the competition 05.03.2018
52 MOSCOW CHAMPIONSHIP 07.03.2018
62 Modeling of the robot
3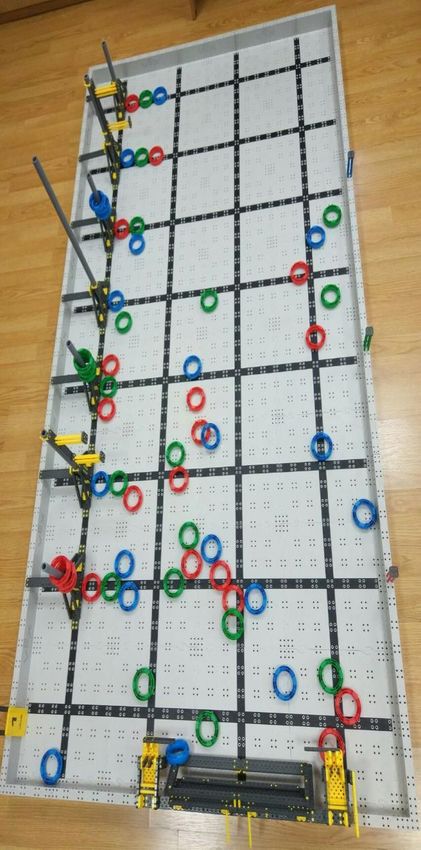
15.12.2017 “RINGMASTERS” SEASON TIMETABLE 2017/2018
Week Date General Tasks Job
0 12.12.2017 Assembling of the field
1 18- Consideration of Brain storm:
23.12.2017 season’s timetable. - Design of the robot
Planning of the time - Field’s situations
limits. modeling
-
2 25- Consideration of Brain storm:
29.12.2017 season’s timetable. - Design of the robot
Planning of the time - Experiments with
limits. robot chassis and
manipulators
3 08- Acquaintance with 3D Programming and testing of
13.01.2018 Snap CAD soft ware the robot (Tele-Op regime)
4 15- Modeling using 3D Snap Correction of robot’s
20.01.2018 CAD. Correction of the design.
aims of the project. Programming and testing of
Correction of the the robot (Tele-Op regime)
timetable based on the
progress.
5 22- Modeling using 3D Snap Brain storm:
27.01.2018 CAD. Consideration of - Autonomous period
possibility to use strategy
gyroscope. - Programming
6 29.01- Modeling using 3D Snap Testing of the robot with
03.02.2018 CAD. Analysis of robot’s various levels of battery.
presentation Tele Op practice 60 seconds
requirements. (Artem, Sasha).
Autonomous practice
(Katya, Olya).
7 05- Team’s robot Tele Op practice 30
10.02.2018 presentation, seconds(Artem, Sasha).
engineering book and Filling of the practical field
robot design tables (Tele Op regime).
Programming of the
autonomous period (Katya,
Olya).
4
8 12- Team’s robot Tele Op practice 30 seconds
17.02.2018 presentation, (Artem, Sasha). Filling of the
engineering book and practical field tables (Tele
robot design Op regime). Programming
of the autonomous period
(Katya, Olya).
9 19- Modeling of Modeling of different
24.02.2018 communication with strategies in Tele Op period
experts (Artem, Sasha). Tele Op
practice 30 seconds(Artem,
Sasha). Filling of the
practical field tables (Tele
Op regime). Programming
of the autonomous period
(Katya, Olya).
10 26.02- Presentation of the Testing.
03.03.2018 project to the pupils of
the school. Imitation of
competitions. Discussion
of the best attempts and
analysis of problems
accrued.
11 07.03- COMPETITIONS PROFEST
09.03.2018 2018 Moscow
DIVISION OF DUTIES IN THE TEAM:
Robot design – all team members.
Engineering book – Olya
3D modeling – Artem, Sasha
Programming – Katya, Olya
Tele Op operators - Artem, Sasha
5
18.12.2017 TASKS:
- studding rules in Russian;
- discussion of the score calculation.
CONSIDERATION AND REALIZATION:
1) STUDING RULES.
2 3 2
1 1 1 1
7
4 5 6
THE AIM OF THE GAME:
1) stacking of the rings onto Low and High Posts (1, 2, 3)
2) emptying of the Starting Pegs (4, 5, 6)
3) emptying of the bonus tray(7).
6
2) COMPARING OF THE RULES IN RUSSIAN AND IN ENGLISH
We decided to compare the rules in Russian and in English.
The translation inaccuracy was found in Russian version:
Dimensions of the robot in English version 11”x20”, in Russian version 13”x24”
1” = 2,54 cm
11” = 27,94 cm (rules indicates abt. 280 mm)
20” = 50,8 cm
7
3) SCORE CALCULATION ANALYSIS
The ring – plastic object in three colors:
- Blue
- Green
- Red
Diameter of the ring – 76 mm
Inner diameter – 51 mm
Height of the ring – 25 mm
Each VEX IQ Challenge Ringmaster
matchincludes:
Sixty (60) rings:
- 20 of each color
- 15 in Bonus Tray
- 9 on Starting Pegs
- 36 on the field in specified
places.
1. Floor 2. Low Posts 3. High Posts
4. Bonus Tray 5. Horizontal Posts 6. Starting Pegs
8
MODELING OF THE SITUATIONS AT THE AND OF THE MATCH.
Examples of score calculation.
1) A Released Bonus Tray is worth 1)An Emptied Starting Peg is worth
twenty (20) points five (5) points.
20 points 3*5 = 15 points
2)An Emptied Starting Peg is worth 2) A Ring Scored in the Floor Goal is
five (5) points. worth one (1) point.
3*5 = 15 points 1*1=1 points
3)A Ring Scored in the Floor Goal is 3) 4)Rings Scored on a Uniform Post
worth one (1) point. are worth double their normal value
6*1=6 points (i.e. ten (10) points each)
4)Rings Scored on a Uniform Post are 3*10=30 points
worth double their normal value (i.e.
ten (10) points each)
3*10=30 points
Total score: 71 points 46 points
9
20.12.2017 TASKS:
- Discussion of the robot design
CONSIDERATION AND REALIZATION:
The results of the team’s brain storm:
According to the rule R2 “Game
guide” the robot-participant of
VEX IQ Challenge Ringmaster must
be equipped with the following
systems:
System 1: moving chassis
Our conclusion:the robot must be
equipped with wheel chassis.
Olya’s drawing
System 2: controller block and
battery
Our conclusion:
the robot must be equipped with
the original VEX IQ controller
block, battery and motors. The
controller block has to be installed
to provide easy battery change (Katya's note).
Artem’s drawing
10System 3: additional
equipment which
allows to manipulate
the objects and
overcome obstacles.
Katya’s drawing
Our conclusion:
The robot must be equipped with
a manipulator to empty starting
pegs (3x5=15 points).
The manipulator has to be able to
move up and down to provide
possibility to move rings from
Starting Pegs to final Vertical or
Horizontal Posts.
Sasha’s drawing
The robot must be equipped with a system allows to collect the rings from the
surface of the field. The system has to include transporting and discharging
facilities.
PLANNING.
1. To create preliminary design of the robot.
2. To test the first model.
1122.12.2017 TASKS:
- to create the prototype
- to perform testing
CONSIDERATION AND REALIZATION:
1) It was decided to create the
chassis on the basis of previous robot.
The manipulator was designed with the
use of Clawbot IQ scheme.
We are using 4 VEX motors,
2 wheels with rubber tires,
2Omni wheels.
122) Programming.
Our first prototype has 4 motors:
motor 6 – left motor and motor 12(right motor) are intended for moving of
the robot.
Motor 5 – motor for up and down moving of the scoop.
Motor 10– scoop motor, to pick up the ring with use of scoop from the
vertical holders.
The first test was carried out in Tele Op.
Control:
ChA and ChB (left stick) – moving of the robot
ChD (right stick) – holding of the rings
BtnLDown and BtnRDown – moving of the scoop
Not used:
BtnFDown, BtnEAp, BtnEDown, ChC (right stick).
13The program was created in Robot C for VEX IQ, version 4.55.
This is our first experience of programming of the Tele Op.
143) Testing of the robot
Testing of the prototype on the
game field shows:
- The chosen control buttons
are not comfortable for the
operator
- The design of the scoop does
not allow to empty theStarting
Pegsand to remove the rings to
the final Vertical or Horizontal
Posts.
The team’s conclusion:
The prototype has to be
changed widely.
Sasha and Artem
started to study Snap CAD
(virtual design tool)
PLANNING:
- To create new Robot design
- To study Snap CAD
1527.12.2017 TASKS:
Creation of the new design considering testing results.
CONSIDERATION AND REALIZATION:
1) Design of the chassis: doubled wheels with rubber tires are installed for
the best friction with the surface of the field. Omni wheels are used as
supporting.
The VEX IQ Controller is installed
under angle for more comfortable
battery replace.
The gyroscope sensor is installed
on the wheels' axis of rotation.
Main characteristics:
wheel's diameter- 6,37 cm., the track (transverse distance between outer
edges of the wheels) – 16.5 cm, the wheels’ base (the distance between the
centers of the front wheel and rear wheel) – 18 cm.
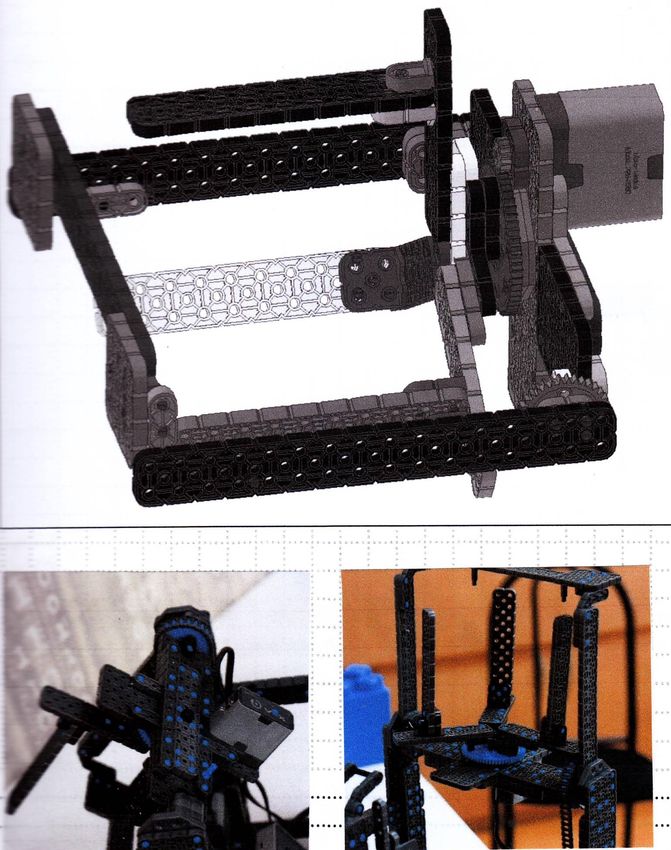
2) Design of the rotating system (revolver system):
the revolver is needed for sorting of the rings and for placing them onto
low and high Posts (vertical and horizontal).
The chain is used for moving of
the revolver system up and down.
The rotation of the revolver is
possible by using of the gear.
The gear ratio is 60/12=5/1 (5:1)
16The maximum number of rings
available to be placed on one holder
of the revolver is 5.
But in aims of safe transportation and
placing into thestacking posts the
number of rings must be not more
than 4.
It is considered that revolver system will be used for placing of the rings
onto horizontal posts. But it can be used for low vertical posts too if necessary.
As per Artem's idea the revolver will be charged with rings using vertical
conveyor.
3) Design of the vertical conveyor for collecting of the rings.
The conveyor is constructed with use of
crawler.
To hold the rings on the conveyor 2x1
Offset corner connectors are used.
The motor rotates crawler with use of
star wheels and chain.
The second prototype of the robot is ready.
17We tested the system of rings’ collection by moving the conveyor by
hand.We witnessed that the idea is working! So, we can move further.
Sasha also suggests to try to design the manipulator to empty the starting
pegs .
4) Design of the manipulator.
To empty the starting pegs
the manipulator has been
assembled.
We used idea of double
action manipulator and the
gears were used to close the
claw and lift up the
manipulator.
But the claw was not able to hold the rings firmly due to backlash.
The second idea was to use
elastic elements to hold the
rings.
The positive aspect is that there are no moving parts in this design.
The negative moment is the need to position the robot against the
starting pegsvery precisely.
18Testing the design, we faced with
problem: even in case of proper position in
the robot is not able to grab the rings
without strong resistance.
To solve this problem, we decided to
install shorter rubber elements.
As result the rings were picked up
successfully but part of them was lost in
transportation.
Vertical moving of the
manipulator’s arm.
The length of the manipulator is
27.5 cm.
It was decided that downshift is
required with such a long arm.
The gear ratio is 36/12=3/1
(3:1)
As result the new design was
ready.
PLANNING:
- To debug the Tele-Op program
- To test the robot
1917.01.2018 TASKS: Руководство по игре
- Debug the program В конструкции
одного робота может
- Testing of the robot
быть использовано не
более шести (6)
интеллектуальных
CONSIDERATION AND REALIZATION: моторов VEX IQ.
1) Appointment of the motors
Port Description Name Reverse Control
Rotating of the revolverMotor BtnUp+
Motor3 revolver drum BtnDown-
Moving of the liftMotor + Riht stick ChD
Motor4 revolver system up
and down
Moving of the conveyor BtnEUp-
Motor5 vertical conveyor to BtnEDown+
pick up the rings
Moving the arm of scoopMotor + BtnLUp-
Motor10 the manipulator up BtnLDown+
and down
Moving of the robot leftMotor Left stick ChA
Motor6 (left motor) and ChB;
BtnFUp (slow)
Moving of the robot rightMotor + Left stick ChA
Motor12 (right motor) and ChB
BtnFUp (slow)
202) New program
213) Testing of the robot
We have tested the robot in Tele-Op regime first.
The appointment of the buttons is comfortable for operator as per Sasha’s
opinion. Artem has found the problem of robot's self moving back without
command.
The field tactics suggested by Sasha:
1) Emptying of theblue Starting Peg
2) Placing of three blue rings onto Low Post#1
3) Emptying of the green Starting Peg
4) Placing of three green rings onto final vertical Low Post#2
5) Emptying of the red Starting Peg
6) Placing of three red rings onto final vertical Low Post #3
7) Bonus tray opening
During the first attempts the following was done:
1) One Starting Pegempted: 5
2) 3 rings of the same color on the final vertical low holder: 30
3) Bonus tray empted: 20
Total score 55
22Operator Time Attempts
1 2 3 4 5
Sasha 60 sec. 55 0 55 59 35
Artem 60 sec. 55 55 61 55 31
Artem has moved 6 rings by hull of the robot into the floor zone at
attempt #3.
As result he received +6 points (total 61).
The last attempt was performed in accordance with
“Game guide” changing the operators.
Руководство по игре
В состав каждой команды входят два Оператора. Операторы не могут
управлять Роботом больше тридцати пяти (35) секунд общего времени Матча.
Total score is 69 points!
Good job guys!
THE TEAM’S CONCLUSION:
1) For better placing of the rings onto Low Posts the design of the
manipulator must be changed
2) The program needs to be changed in the aims of automation of
conveyor and revolver system.
2320.01.2018 TASKS:
- Changing of the design of the manipulator.
- Debug and development of Tele-Op regime program
CONSIDERATION AND REALIZATION:
1) Upgrade of the manipulator
The design was changed by Sasha with use of Snap Cad. The angle bars were
used for better holdingof rings.
24Besides the scoop our team decided to include following changes:
- The base of revolver is changed
- The elements holding the rings on conveyor are changed
As result the new design of the claw has been constructed.
252) Development of the program
264 tasks were created in the new program:
1) revolv – control ofrevolverMotor
2) conv - control of conveyor
3) Tele-Op - remote control
4) chuckExitTeleOp – start and stop of Tele-Op
2724.01.2018 TASKS:
1) Strategy development for Tele-Op period.
2) Testing of the robot in Tele-Op
3) Strategy development and creation of the program for the autonomous
period.
CONSIDERATION AND REALIZATION:
1) Strategy of Tele-Op
The strategy suggested by Sasha was decided as main:
- emptying of the blue starting peg; placing of three blue rings onto low #1;
- emptying of the green starting peg;
- placing of three green rings onto final vertical low holder #2;
- emptying of the red starting peg;
- placing of three red rings onto final vertical low holder #3;
- bonus tray opening.
2) Testing of the robot in Tele-Op
Operator Time attempts
1 2 3 4 5
Sasha 30 sec.
92 105 108 125 129
Artem 30 sec.
281) 92=2x30+2x5+20+2
2) 105=3x30+3x5
3) 108=3x30+3x5+3
4) 125=3x30+3x5+20
5) 129=3x30+3x5+20+4
THE TEAM’S CONCLUSION:
Automation of conveyor and revolver on Tele-Op regime allows to receive
more points.
3) Strategy development and creation of the program for the
autonomous period.
The first strategy suggested by Olya:
- Emptying of the blue starting peg
- Placing of 3 blue rings onto low vertical post #1
- Collecting of the ring from the field and placing them on to
horizontalpost.
The following functions have to be created inside of the program:
- Moving forward and back
- Right turn and left turn
- Scoop up and down
- Revolver up and down
- Rotation of the revolver
29Here is the result:
3003.02.2018 TASKS:
1) Creation of 3D model of the robot
2) Training of remote control skills
3) Creation of autonomous program and testing.
CONSIDERATION AND REALIZATION:
1) Creation of 3D model of the robot
Sasha and Artem are going on
work with SnapCad creating 3D
model of our robot.
3D model of chassis was
created today by Artem.
ROBOT CHASSIS
312) The new strategy was suggested by Sasha:
1) Emptying of the bluestarting pegs
2) Placing of three blue rings onto final vertical low holder #1
3) Emptying of the green starting peg
4) Placing of three green rings onto final vertical low holder #2
5) Collecting of the rings from the field
6) Placing of rings onto final horizontal post
7) Bonus tray opening
Operator Time attempts
1 2 3 4 5
Sasha 30 sec.
120 130 125 115 125
Artem 30 sec.
120=2x30+2+5+20+30
130=2x30+2x5+30+40
125=2x30+2x5+20+30+5
115=2x30+20+20+3x5
125=2x30+2x5+20+30+5
The maximum score is 130 points.
323) Creation of autonomous program and testing.
33During the first tests we
recognize that the robot makes
the turns not enough precisely. It
was decided to use gyroscope.
The gyroBot function was
created.
We also applied correct
function for positioning of the
robot with use of field’s side
board.
CONCLUSION: the multiple
attempts show unstable
execution of the strategy by the
robot.
PLANNING:
- go on creating 3d model;
- to create new strategy for autonomous regime.
3405.02.2018 TASKS:
1) Developing of the 3D model.
2) Remote control skills training.
CONSIDERATION AND REALIZATION:
1) 3D model of the robot’s mechanisms.
Sasha has finished 3D modeling of the vertical conveyor.
35Meanwhile Artem was modeling revolver mechanism.
36Remote control in Tele-Op regime.Artem has suggested to test robot with
new strategy:
371) Emptying of blue and green starting pegs;
2) In process of emptying to collect the rings from the field;
3) Placing of the rings onto low vertical posts;
4) Placing of the rings onto horizontal posts.
Operator Time Attempts
1 2 3 4 5
Sasha 30 sec.
120 110 82 105 141
Artem 30 sec.
120=10+2x30+40+2x5
110=2x30+30+10+5x2
82=10+30+20+20+2
105=30x2+2x5+30+5
141=2x30+30+40+10+1
The maximum score – 140+1 points! Great!
Operator’s training with use of the first strategy:
Operator Time Attempts
1 2 3 4 5
Sasha 30 sec.
129 128 146 115 165
Artem 30 sec.
129=3x30+20+3x5+4
128=3x30+20+3x5+3
146=20+3x30+5x4+15+1
115=30+20+30+3x5+20
38165=3x30+40+20+15
10.02.2018 TASKS:
1) Developing of new autonomous strategy.
2) Creating of the program and testing.
CONSIDERATION AND REALIZATION:
1) New autonomous regime strategy
1. To push right button of the bonus tray.
2. Emptying of the red starting peg
3. To push left button of the bonus tray.
4. Placing of the red ring onto low vertical post.
2) Autonomous regime program.
3940
41
12.02.2018 TASKS:
Training in remote control skills.
CONSIDERATION AND REALIZATION:
The series of attempts:
Strategy Attempts
1 2 3 4 5
1 108 148 155 155 125
2 155 126 131 120 90
3 140 128 119 125 130
1ststrategy:
108=2x30+10+15+20+3
155=3x30+30+20+15
148=3x30+20+15+20+3
125=30+20+5+30+15+20
2ndstrategy:
155=3x30+30+20+15
126=2x30+20+15+20+1
131=30x2+20+40+10+1
90=30+5+20+15+20
3rd strategy:
140=3x30+40+10
128=15+3x30+3+20
119=20+2x30+20+15+4
125=20+30+40+15+20
130=30+30+20+40+10
42New series of attempts:
Strategy Attempts
1 2 3 4 5
1 90 106 134 130 130
2 128 123 125 131 120
3 120 110 8 105 141
1st strategy: 2nd strategy:
90=30+20+5+15+20 128=2x30+30+10+2+8
106=2x30+20+20+15+1 123=2x30+20+3x15+3+30
134=3x30+3x5+20+9 125=2x30+30+10+20+5
130=3x30+20+15+5 131=2x30+30+3x5+20+5+1
120=2x30+30+20+10
3rd strategy:
120=10+2x30+40+2x5
110=2x30+30+10+5
82=10+30+20+20+2
105=30x2+2x5+30+5
141=2x30+30+40+10
4316.02.2018 TASKS:
Debugging of the autonomous regime
CONSIDERATION AND REALIZATION:
4419.02.2018 TASKS:
Training in remote control skills.
CONSIDERATION AND REALIZATION:
The series of attempts:
Strategy Attempts
1 2 3 4 5
1 129 128 146 115 165
2 120 110 124 146 106
3 137 120 110 102 130
1st strategy:
129=3x30+20+3x5+4
128=3x30+20+3x5+3
146=20+3x30+5x4+15+1
115=30+20+30+3x5+20
165=3x30+40+20+15
2nd strategy:
120=2x30+30+20+2x5
110=2x30+2x5+20+20
1242x30+30+2x5+20+4
146=2x30+3x10+2x10+20+15+1
106=2x30+30+15+1
3rd strategy:
137=2x30+40+15+20+2
120=2x30+30+20+10
110=20+30+30+20+10
102=2x30+30+10+2
45130=2x30+40+10+20
21.02.2018 TASKS:
Creating of the 3D model of the robot.
CONSIDERATION AND REALIZATION:
4626.02.2018 TASKS:
Creating of project presentation.
CONSIDERATION AND REALIZATION:
Our robot’s capabilities:
Emptying of the bonus tray
Placing of the rings onto low horizontal post with
use of revolver system
47Placing of the rings onto low vertical post with use of revolver system
Placing of the rings onto low vertical post with use of manipulator
Emptying of the starting peg
Collecting of the rings from the field and charging of the revolver.
4805.03.2018 TASKS:
IMITATION of the competitions.
CONSIDERATION AND REALIZATION:
1) Checking of the robot’s
dimensions.
The robotis in compliance with
requirements in starting
position:
Length – 50 cm;
Width – 25.5 cm;
Height 37.2 cm.
2) We have present our
project in presence of spectators.
The design of the robot
allows to perform all tasks which
are required for high score:
- Emptying of the starting
pegs;
- Collecting of the rings from
the field;
- Placing of the rings onto
vertical and horizontal post;
- Emptying of the bonus tray.
All this allows us to choose the tactics in alliance.
493) We have performed 6 attempts in Tele-Op.
Operators: Artem and Sasha.
Results:
1st attempt – 130 points;
2nd attempt – 110 points;
3rd attempt – 146 points;
4th attempt – 135 points;
5th attempt – 120 points;
6th attempt – 135 points.
Total 806 points.
4) Autonomous period.
3 attempts were performed.
Programmers: Katya and Olya
Results:
1st attempt – 20 points;
2nd attempt – 55 points;
3rd attempt – 25 points.
TEAM’S CONCLUSION:
All main tasks in project development are completed.
50Russian VEX IQ Ringmaster Championship
07-09 March 2018
Moscow, VDNKh
Timetable.
The 7th of March (Wednesday)
Time Description
10:00-12:00 Test competotions
12:00-13:30 Qualifications
15:00-17:00 Qualifications
17:30-18:00 Volunteers 'and judges' meeting
The 8th of March (Thursday)
Time Description
09:00-10:00 Test runs
10:00-13:30 Qualifications
15:00-17:30 Qualifications
17:30-18:00 Volunteers 'and judges' meeting
The 9th of March (Friday)
Time Description
09:00-12:00 Qualifications
12:00-15:00 Quarter finals, Semifinals
15:40-16:30 Finals
TEST RUNS
The team had the opportunity to train on the field on 07-08 March. Olya
and Katya have signed the team for the tests preliminary.
Each team has 5 minutes for test work and training.
5152
After 3 training we decided to
choose the team for alliance and to
perform test run together. We have
chosen team 92601A.
Sasha and Dima are the pupils of the
7th grade of Surgut
Naturally Scientific Lyceum.
It was the best test run with the score 183 point.
The teams were acting coordinated and clear. Our robots differed from
others in their ability to collect ring from the surface of the field, to remove
rings from starting pegs to vertical and horizontal posts.
QUALIFICATIONS
The 7th of March
Match № Team Field № Time
Q16 57712A F2 14:55
Q31 24393A F1 16:10
Q40 33767A F2 16:55
The 8th of March
Match № Team Field № Time
Q59 48424A F1 10:54
Q73 44397A F1 11:36
Q96 69915A F2 12:45
Q110 64058D F2 13:27
Q126 64058A F2 13:27
Q143 81692A F1 15:06
Q160 92601A F2 15:57
Q173 99444V F1 16:36
53The 9th of March
Match № Team Field № Time
Q191 37337A F1 10:30
Q208 64058A F2 11:21
RESULTS:
Q16 – 112 points
Q31 – 92 points
Q40 – 138 points
Q59 – 86 points
Q73 – 136 poits
Q96 – 116 points
Q110 – 145 points
Karim and Matvey, school
1363, Moscow - our one of
the best alliances. Our
teams discussed the tactics
of the match in advance.
Each team performed its
duties properly.
Q126 – 131 points
Q143 – 151 points
Q160 – 177 points
54In qualification Surgut team, Sasha and Dima, did the job correctly,
without mistakes, same as at test run.
It was the best result of the alliance of the championship.
Q173 – 107 points
Q191 – 145 points
Ivan and Artem, school 1519, Moscow.
Q208 – 117 points (solo match)
The average score of our team: 139.90 points.
Thus, we have won the first position in qualifications.
55FINAL MATCHES.
16 teams have participated in finals.
Rank Team Average score
1 70145A 136.90
2 25396U 117.30
3 66947B 115.80
4 87994B 109.90
5 65047A 100.30
6 57712A 95.70
7 63082A 90.50
8 48424A 86.60
9 92601A 85.60
10 33767A 85.50
11 37337A 85.30
12 81692A 82.80
13 87994A 75.80
14 99444V 72.00
15 64058A 70.20
16 44397A 69.90
56The final alliances were paired in accordance with the rules.
Our team was alliance with team 25396U,
Maksim and Nikolay (coach Maksim Pyanov, school 709, Moscow).
RESULTS OF FINAL MATCHES.
Rank Final score
15/16 27
13/14 71
11/12 95
9/10 65
7/8 96
5/6 108
3/4 108
1/2 138
Our team in alliance with team 25396U
has WON THE CHAMPIONSHIP with the final score 138 points.
57AUTONOMOUS PERIOD
Five teams have participated in this competition. The matches took place
on the 09th of March.
Time Team
12:05 48006А
12:10 64058А
12:15 70145А
12:20 35615А
12:25 99444V
Our score is 20 points. We emptied bonus tray.
INTERVIEW
Our team has been interviewed by the judge of VEX competitions - Ignatiy
Matsal.
The interview was concerned
with the design of the robot and
engineering book.
We have presented the
design of our robot, our
programs and have told how the
engineering book was created.
The feedback was positive.
We have received valuable recommendations concerning development of
our project.
5814.03.2018 MOSCOW CHAMPIONSHIP ROBOT DESIGN ANALYSIS
This robot has parallelepiped shape
and equipped with vertical conveyor.
The inner design is hide behind outer
details. The robot has wheel chassis.
Controller is situated in the aft part.
The robot is collecting the rings into
the hull and hoist them up with use of
vertical conveyor placing the ring onto
high vertical post. There were only
couple robots allow to place the rings
onto high vertical post.
Positive moments: Negative moments:
1. Strong gripping device; 1. Sorting of the ring is not available;
2. The robot has a special device on 2. the rings cannot be placed onto
the bumper to press the buttons of horizontal posts;
the bonus tray;
3. The design allows to collect big
number of rings from the field;
4. The rings can be placed on the
high vertical post.
This robot is equipped with manipulator
to empty the starting pegs. This kind of design
was seen very often at the championship.
Positive moments: Negative moments:
1. The robot has a 1. Manipulator is not
special device on firm
the bumper to press 2. The rings cannot be
the buttons of the placed onto
bonus tray horizontal posts
59Positive moments: Negative moments:
2. The robot has manipulator 3. Collecting of the rings from the field
3. The rings can be placed on is not available
vertical posts 4. Sorting of the ring is not available;
6019-30.03.2018 TASKS:
Modernization of robot’s design.
Development of new strategy for Tele-Op regime.
CONSIDERATION AND REALIZATION
1) Modernization of robot’s design.
We have assembled one more
robot with use of VEX IQ set
won at the championship.
We have found minor mistake
in the design: the conveyor was
not perpendicular to the field.
The design of conveyor was
changed.
2) New strategy:
- to start backwards, to make a turn near vertical post # 2 (to push some
rings to one point zone if it is possible);
- moving to the red starting peg collecting rings from the surface of the field
meanwhile;
- emptying of the red starting peg;
- pushing left button of the bonus tray;
61- placing of red rings onto 4th vertical low post;
- pushing right button of the bonus tray;
- emptying of the green starting peg;
- placing of green rings onto 3rd vertical low post;
- placing of rings onto horizontal post with use of revolver.
New tactics gives 130 point.
3) Development and testing of new
strategy.
We use two robots for test runs.
The first robot – operators Sasha and Artem
(30 seconds each one), the second robot –
operator Olya (60 seconds).
We used printed schemes to fix all changes in
tactics applied.
6263
04-25.04.2018 TASKS:
Changing of 3D model
CONSIDERATION AND REALIZATION
Sasha and Artem has made changes of 3D model concerning the new
design aspects.
6465
66
You can also read