A cost-effi cient solution to true color terrestrial laser scanning
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
A cost-efficient solution to true color terrestrial laser scanning
Peter D. White*
School of Engineering, Durham University, Durham DH1 3LE, UK
Richard R. Jones*
Geospatial Research Ltd., Department of Earth Sciences, and e-Science Research Institute,
Durham University, Durham DH1 3LE, UK
ABSTRACT and reflect off the target object. The scanner automatically rotates con-
tinuously while the laser beam is fired repeatedly (with a frequency
This paper presents a low-cost true color terrestrial laser scan- up to 100,000 points/s, depending on the type of scanner used). In this
ning system, described in terms of the hardware and software way, a detailed three-dimensional (3D) image of the surface of the tar-
elements necessary to add color capability to existing non-color get object is captured (Figs. 1A, 1B). With conventional TLS, measured
laser scanners. A purpose-built camera mount allows a digital points in the laser scan point cloud can be assigned different shades of
camera to be positioned coincident and collinear with the beam gray according to the intensity of the reflected laser beam (Figs. 1B,
detector of the laser scanner device, such that mismatch between 1E), or can be mapped to an arbitrary color ramp according to intensity
color data and laser scan points is minimized. An analytic map- or a positional attribute such as relative elevation or distance from the
ping implemented in a Matlab toolbox registers the photographs, scan position (Fig. 1C). For some kinds of analysis (particularly purely
after rectification, with the laser scan point cloud, by solving for geometric studies such as volumetric calculations), the resulting gray
two tie-points per image. The resulting true color point clouds are scale or false color point cloud is adequate. However, while gray scale
accurate and easily interpretable. The adjustable camera mount and false color rendering can provide some help during interpretation
fits a range of cameras and, with minor adaptation, could be used of the laser scan data, they are often less useful for many kinds of more
with different laser scanner devices. A detailed error analysis will detailed analysis. For example, we find that the additional visual cues
allow comparisons to be drawn with alternative technologies, such provided by true color data (Figs. 1D, 1F) are important for the cor-
as photogrammetry and commercial true color laser scanners. This rect identification of geological features from high-resolution TLS point
low-cost, accurate, and flexible true color laser scanning technol- clouds (Clegg et al., 2005; Trinks et al., 2005; Waggott et al., 2005).
ogy has the potential to make a significant improvement to existing Added color is equally beneficial when interpreting scans taken at short
methods of spatial data acquisition. range (e.g., Kokkalas et al., 2007) and longer ranges of several hun-
dred meters (e.g., Labourdette and Jones, 2007). Here we use the term
Keywords: laser scanner, point cloud, color matching, camera calibra- “true color” to mean high-resolution (32 bit) color typically acquired
tion, lidar, terrestrial laser scanning. by a good-quality digital camera; i.e., in the opposite sense of the “false
color” outcrops shown in Figure 1C.
INTRODUCTION True color terrestrial laser scanning (TCTLS) requires undistorted digi-
tal photographs to be precisely mapped onto the laser scan point cloud
Terrestrial laser scanning (TLS) is a powerful method for the acquisi- data, thus producing a true color 3D model. A number of TCTLS devices
tion of detailed positional data, and is now routinely used as a standard are already manufactured and marketed, but generally capture low-quality
tool in civil engineering and in as-built surveying (Jacobs, 2005; Dunn, color data, and are much more expensive than conventional non-color
2005). In recent years the use of TLS has expanded widely with applica- TLS equipment. This paper presents an alternative, relatively low cost
tions in many other fields, including mining (Ahlgren and Holmlund, method for adding high-resolution color capability to standard terrestrial
2002), geomechanics (e.g., Slob and Hack, 2004), geological surveying laser scanners. In this system, the color information is captured by a digi-
(Jones et al., 2004; McCaffrey et al., 2005), erosion and landslide moni- tal camera and registered with the point cloud using an analytic mapping
toring (Haneberg, 2004; Lim et al., 2005; Rosser et al., 2005), petroleum implemented in Matlab. The key component in the system is a specially
reservoir modeling (Løseth et al., 2003; Bellian et al., 2005; Pringle et al., designed camera mount that enables the color information to be captured
2006; Jones et al., 2008), architecture (El-Hakim et al., 2005), archaeol- from precisely the same point as that from which the laser scanner cap-
ogy and heritage conservation (Barber et al., 2006), forestry (Thies et al., tures its spatial information.
2004), city modeling (Hunter et al., 2006), and many others. In this paper, the examples we show all use a common approach in
The overall principle of terrestrial laser scanners is to measure the which each point in the laser-scan point cloud is allocated a color value
return traveltime (and hence distance) for an emitted laser beam to hit from the nearest pixel in the corresponding mapped photo; i.e., the output
*White: Present address: Arup, Central Square, Forth Street, Newcastle upon Tyne, NE1 3PL, UK; peter.white@arup.com. Jones: Corresponding Author: richard@
geospatial-research.co.uk
Geosphere; June 2008; v. 4; no. 3; p. 564–575; doi: 10.1130/GES00155.1; 11 figures; 1 table.
For permission to copy, contact editing@geosociety.org
564
© 2008 Geological Society of America
Downloaded from https://pubs.geoscienceworld.org/gsa/geosphere/article-pdf/4/3/564/3338879/i1553-040X-4-3-564.pdf
by guest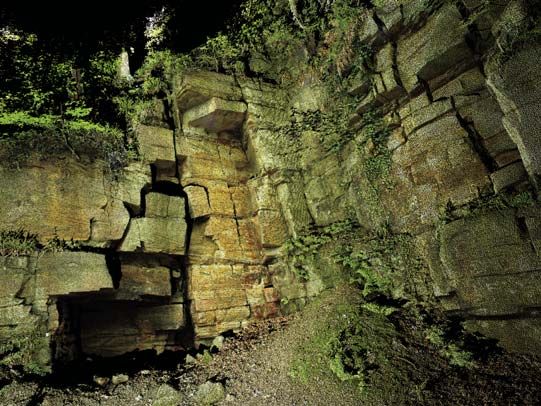
True color terrestrial laser scanning
A B
8.7m
C
E
1.750m
D
F
Figure 1. Terrestrial laser scan of an abandoned sandstone quarry in Carboniferous Coal Measures, County Durham.
(A) Scanning the outcrop with a Leica HDS 3000 scanner. (B) Resultant point cloud, showing gray scale points according
to intensity of the reflected beam. (C) Point cloud given false color according to the distance of each point from the scan
position. (D) Points in the point cloud allocated true color from tightly calibrated digital photos. (E) Close-up detail of
the gray scale point cloud. (F) Close-up of the colored point cloud, showing the extra stratigraphic detail now visible.
Vegetation is also more easily recognized in the colored point cloud.
Geosphere, June 2008 565
Downloaded from https://pubs.geoscienceworld.org/gsa/geosphere/article-pdf/4/3/564/3338879/i1553-040X-4-3-564.pdf
by guest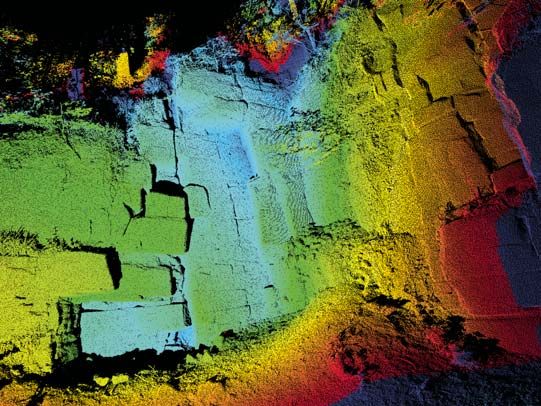
White and Jones
as shown here is a colored point cloud, with brighter, more accurate color CAMERA MOUNT
rendition compared with most existing TCTLS devices (which typically
use a low-resolution onboard video camera to provide color data). This In order to minimize potential mismatch between the scan data and
approach can also be extended to allow the mapped images to be draped color photos, a special camera mount was designed so that the optical
onto a triangulated (meshed) surface derived from the point cloud (cf. Xu center of the camera can be positioned to align with the center of the laser
et al., 2000; Bellian et al., 2005), so that the output is a textured model scanner. The essential feature of the mount is that it ensures that the center
of the surface of the outcrop. This gives a model with even greater pixel of the entrance pupil of the camera lens remains coincident with the laser
resolution and visible detail. scanner center even when the camera is panned and tilted. A prototype
While this work was particularly motivated by the aim to demonstrate mount was designed to be used with a Measurement Devices Ltd. (MDL)
a prototype solution for a low-cost alternative to high-end commercial LaserAce 600 scanner. The mount accepts a wide range of cameras. The
TCTLS, there were a number of additional reasons behind the project: camera can easily be adjusted on the mount within a range of positions,
1. To be able to provide the best possible color-mapped point clouds although minor design modification to the dimensions of the mount was
as input for new methods for automated feature recognition (e.g., auto- needed to make it suitable for use with some other makes of scanner. The
mated removal of vegetation; extraction of fracture planes from the point mount was designed to fit the same standard tribrach fitting as the MDL
cloud, c.f. Slob et al., 2005). Existing methods typically use only geomet- scanner and maintain the camera lens pivot point at the same height above
rical analysis (e.g., edge and corner detection) and/or intensity contrasts. the tribrach as the scanner center. Thus the scanner can be removed from
Supplementing feature recognition algorithms to exploit additional color the tripod once scanning is completed, and the camera mount attached in
information has very interesting potential, but clearly relies on a precise its place, thereby ensuring that the laser scanner center and camera lens
matching of the color data and point cloud as input. pivot point are coincident.
2. To provide a platform to allow a wider range of digital cameras to be To facilitate prototype design and fabrication, a rotating tribrach adapter
used. For example, this has allowed us to test the use of lenses with longer (www.surveying.com/products/details.asp?prodID=2020-00) was used as
focal lengths to capture very detailed photographs that can then be draped the base of the camera mount. As well as fitting the scanner tribrach, the
onto meshed surfaces derived from the point cloud. rotating tribrach adapter provided a flat surface with a good sized protrud-
3. To allow for future development and testing of improved color map- ing thread in the center, and the rotation mechanism necessary for panning
ping algorithms (e.g., to develop smoother color mapping in areas of over- the camera. The rest of the mount, fabricated from aluminum, was built on
lapping images). top of the adapter. A camera attaches to the mount using the standard ¼ in
4. To be able to test the sensitivity of positioning of the camera with Whitworth (6.35 mm) thread tripod socket found on the base of most cam-
respect to the laser scanner sensor. At present, some TCTLS devices (e.g., eras. Figure 2 shows a rendered AutoCAD model of the as-built mount
Riegl LMS scanners) use cameras mounted on top of the scanner body and a photograph of the mount with an SLR camera attached.
(i.e., non-collinear with the laser scanner beam), and this introduces an The mount holds the camera in portrait format, partly because if a wide-
error during matching of the photos with the point cloud data. enough lens is used, a single photograph at each pan position will often
5. To provide calibrated color outcrop models for benchmark compari- be sufficient, and partly because it would be difficult to design and manu-
sons with other methods of building 3D outcrop models such as digital facture a mount that would hold the camera in landscape format and allow
photogrammetry (e.g., Poropat, 2001; Pringle et al., 2001, 2004). the necessary panning and tilting while keeping the position of the center
6. To have a precise, flexible system that is capable of mapping spa- of the entrance pupil constant. The design process was simplified by the
tial data and imagery captured with alternative kinds of scanner and/ fact that the majority of SLR cameras have their tripod sockets situated
or camera device: e.g., for testing prototype scanners built with differ- directly below the longitudinal lens axis (when the camera is viewed in
ent wavelengths or other laser properties, or for use with other types of landscape orientation). This meant that in the plate to which the camera is
camera such as infrared or multi-spectral equipment (see also Bellian et attached, a simple slot with its centerline passing through the horizontal
al., 2007). axis of rotation was sufficient to allow the center of the entrance pupil to
7. To develop the necessary expertise to enable independent calibration be positioned in the horizontal rotational axis. Adjustments are therefore
of camera lenses and testing of TCTLS performance. only required in two axes in order to position the pivot point of the camera
While a number of scanner manufacturers clearly have their own pro- lens in the vertical rotational axis.
prietary methods to provide TCTLS, there is relatively little information The prototype camera mount described and used in this paper is non-
available in the public domain that describes existing methods for color automated, such that the operator must manually reposition the camera
mapping of laser scan data. Balis et al. (2004) implied how mapping around its rotation axes between each overlapping consecutive shot. Work
is achieved using a Mensi GS200 scanner, which has internal onboard is under way to prototype a motorized version of the mount that will auto-
video circuitry. Abmayr et al. (2004) used a specialized line-scanning matically take the photographs needed to cover a prescribed area.
chromatic recorder to gather color information from the scanned area.
Some workers have developed methods to combine scan data with pho- CAMERA CALIBRATION AND IMAGE RECTIFICATION
tos taken with a standard digital single-lens reflex (SLR) camera from
unspecified positions (i.e., scanner and camera need not be coincident Camera calibration and image rectification are well documented in rela-
and collinear). Such methods typically minimize errors by using a large tion to applications in computer vision. Camera calibration is the process
number of manually defined tie-points for each image (tie-points are of determining the internal camera geometric and optical characteristics
points that can be located in both the rectified photographs and the (intrinsic parameters) and/or the 3D position and orientation of the camera
point cloud). Examples of this approach include Xu et al. (2000), Gram- frame relative to a certain world coordinate system (extrinsic parameters)
matikopoulos et al. (2004), and Abdelhafiz et al. (2005), although the (Tsai, 1987). It is not necessary to determine the extrinsic parameters in
details of their methods are not all fully published. Abmayr et al. (2005) the TCTLS system described in this paper, because the camera is mounted
give a comprehensive description of the use of such a method with the at the center of rotation of the laser scanner and tie-points are used to reg-
Z+F 5003 scanner. ister the images with the point cloud.
566 Geosphere, June 2008
Downloaded from https://pubs.geoscienceworld.org/gsa/geosphere/article-pdf/4/3/564/3338879/i1553-040X-4-3-564.pdf
by guest
True color terrestrial laser scanning
A B
Figure 2. Rendered model of the as-built camera mount and a photograph of the mount with a single-lens reflex
camera attached. Height of mount is 36 cm.
In order to register the photographs with the point cloud, the photo-
graphs must be rectified such that they appear to have been captured with xis
lA
a pinhole camera, the pinhole of which is coincident with the laser-beam P ti ca
Op
detector inside the laser scanner device. Figure 3 shows the pinhole cam-
z
era model with lens distortion, as well as how the laser scanner and image
coordinate systems relate to each other. The orientation of the scanner y
coordinate system about the vertical axis is arbitrary (for the MDL scan-
ner used in this study it is defined by the direction in which the device is
pointing when it is turned on).
According to Heikkilä and Silvén (1997), the pinhole camera model is Ta
rg
e tO
based on the principle of collinearity, where each point in the object space bje
x c
is projected by a straight line through the projection center into the image Scanner t
Pl Coordinate
plane. Since after undistortion the photographs appear to have been cap- u “Pane
inh o f System
tured with a pinhole camera, and if the camera-lens system is positioned Q' ole
”
Q
such that the pinhole is coincident with the center of rotation of the laser Pl
v Caane
scanner, then no further image rectification is required. Therefore it is nec- Im me of
essary to find the pinhole point for the camera-lens system. This point is Coage ra
Sy ord Sen
ste ina so
the center of perspective of the lens, about which the camera-lens sys- m te r
tem can be pivoted without introducing any parallax error between pho-
tographs (Kerr, 2005). According to Kerr (2005), the correct pivot point
is the center of the entrance pupil of the lens and not, contrary to popular Figure 3. Pinhole camera model with lens distortion, where P is a
belief, the front nodal point. The center of the entrance pupil is easily three-dimensional subject point, Q is its distorted image point, and
located empirically by observing the relative movement of the background Q' is its undistorted image point (Shih et al., 1995).
Geosphere, June 2008 567
Downloaded from https://pubs.geoscienceworld.org/gsa/geosphere/article-pdf/4/3/564/3338879/i1553-040X-4-3-564.pdf
by guest
White and Jones
and foreground as the camera is pivoted about different points. The point rotates about the vertical axis and is, therefore, the angle between the azi-
at which there is no relative movement between the background and fore- muth zero line in the horizontal plane and the projection of the subject
ground is the correct pivot point. point onto the same plane. This is not the same as the horizontal angle
The intrinsic parameters required to rectify the image to achieve this between the subject point and the vertical plane that passes through the
pinhole camera model are usually the effective focal length, scale factor, azimuth zero line. The inclination is simply the direct angle between the
and image center (principal point), as well as those needed to correct for horizontal plane passing through the image center and the subject point.
the systematically distorted image coordinates (Heikkilä and Silvén, 1997). The implications of the method of operation of the laser scanner can
The main type of distortion is radial distortion, in which the actual image be understood by considering the lines traced out by the laser beam on
point is shifted radially in the image plane. In addition, a decentring distor- the inside of a virtual sphere when θ or φ is kept constant, given that the
tion with both radial and tangential components occurs due to the centers of laser scanner center is at the center of the sphere. If the inclination is kept
curvature of lens surfaces not being collinear. Figure 4 illustrates the effects constant while the azimuth is varied, a line of “latitude” is traced on the
of radial and decentring distortions on a synthetic image. surface of the sphere. If, instead, the azimuth is kept constant while the
A number of methods have been documented for determining the dis- inclination is varied, a line of “longitude” is traced on the surface.
tortion parameters empirically. One example of an application for cam- The interaction of the laser scanner and the camera can be understood
era calibration and image rectification is the GML (Graphics and Media by imagining the projections of the lines of latitude and longitude onto a
Lab) C++ Camera Calibration Toolbox (v. 0.31 or later) by Vezhnevets virtual plane external to the sphere by straight lines passing through the
and Velizhev (2005, 2006). This application has been tested with the center of the sphere. If the plane is vertical, the lines of latitude above the
TCTLS solution presented in this paper, although any alternative method equator map to upward-curving lines on the plane, and those below the
that adequately removes distortion from the photographs can be used as equator map to downward-curving lines. The lines of longitude, however,
part of the system. Vezhnevets and Velizhev’s (2005, 2006) toolbox is an map to vertical lines on the plane. If the plane is now tilted upward, the
implementation in C++ of a Matlab toolbox by J.-Y. Bouguet (www.vision. projected lines of latitude now all curve upward, as long as the bottom
caltech.edu/bouguetj/calib_doc/download/TOOLBOX_calib.zip), with the of the virtual plane is above the equatorial plane. The projections of the
addition of another corner detection algorithm. Both toolboxes use an lines of longitude remain straight, but splay out toward the bottom of the
intrinsic camera model inspired by Heikkilä and Silvén (1997), and a main plane. If the plane is tilted downward, the projected lines of latitude curve
initialization phase partially inspired by Zhang (2000) and partially devel- downward and the projections of the lines of latitude splay out toward the
oped by Bouguet (both available from the Intel Open Source Computer top of the plane. This is illustrated in Figure 6.
Vision Library at www.intel.com/technology/computing/opencv). Unlike Since the scanner is an inherently spherical system using polar coor-
Bouguet’s toolbox, Vezhnevets and Velizhev’s (2005, 2006) software is dinates, and the camera sensor is a plane, the scanner-camera system
capable of rapidly undistorting large, high-resolution images. conforms to this behavior, with the virtual image plane corresponding to
In order to calibrate a camera, a set of photographs is taken of a planar the camera’s sensor. When the virtual plane in Figure 6 is vertical, this
“checkerboard” calibration target. The toolbox is able to detect the corners corresponds to the case in which the camera’s sensor is vertical, i.e., the
of the squares in the photographs of the target and use their positions to longitudinal axis of the lens is pointing horizontally. Similarly, when the
calculate the intrinsic calibration parameters. Any photographs taken with virtual plane is inclined, this corresponds to the situation in which the
the same camera and lens (at the same focal length, if it is a zoom lens) camera is tilted about a horizontal line passing through the laser-beam
can then be undistorted using the toolbox, whether or not the photographs detector (i.e., center of the scanner) and the camera lens pivot point. From
were taken before the calibration was carried out. Figure 6 it can be deduced that in the case where the lens is pointing hori-
zontally, the expression for v will be a function of both θ and φ, while u
COREGISTRATION OF COLOR IMAGES AND SCAN DATA will be a function of θ only. In the tilted case, however, both u and v are
functions of both θ and φ. This information is summarized in Table 1. A
In order to register an image with a point cloud, a mapping must be
determined that gives expressions for the image pixel coordinates u and
v (Fig. 5), in terms of the azimuth (horizontal) and inclination (vertical) u
angles, θ and φ, respectively, from the laser scanner center to the corre-
sponding point in the cloud.
It is important to note the way in which laser scanners measure the
azimuth and inclination angles. The azimuth is measured as the scanner
v
V
U
Figure 5. Coordinate system of the rec-
Original Radial Distortion Decentring Distortion tified image plane. U and V are the total
number of horizontal and vertical pixels
in the image, respectively; u and v are the
Figure 4. Effects of radial and decentring distortions on a synthetic pixel coordinates relative to the top left
image (Prescott and McLean, 1997). corner of image.
568 Geosphere, June 2008
Downloaded from https://pubs.geoscienceworld.org/gsa/geosphere/article-pdf/4/3/564/3338879/i1553-040X-4-3-564.pdf
by guest
True color terrestrial laser scanning
5. Mapping color values from the images onto the point cloud. This is
done by using Newton’s method to solve the three simultaneous nonlinear
equations as derived in the Appendix.
6. Saving an output file of point cloud data, now comprising x, y, and z
ф = constant ф = constant
θ = constant θ = constant ф = constant coordinates and RGB (red green blue) color values.
θ = constant The point cloud data can thus be suitably colored and can be imported
into appropriate visualization software, such as the open-source program
ParaView (www.paraview.org).
TESTING THE SYSTEM
To test the system a number of field tests were performed, using a vari-
ety of laser scanners and cameras. In the first tests, buildings were mainly
Plane Vertical Plane Inclined Upwards Plane Inclined Downwards
used as the chosen target objects, because they have distinct geometric
features that can readily be checked in both the scan data and photographs.
Figure 6. Projections of lines of constant azimuth and inclination Later tests used geological outcrops.
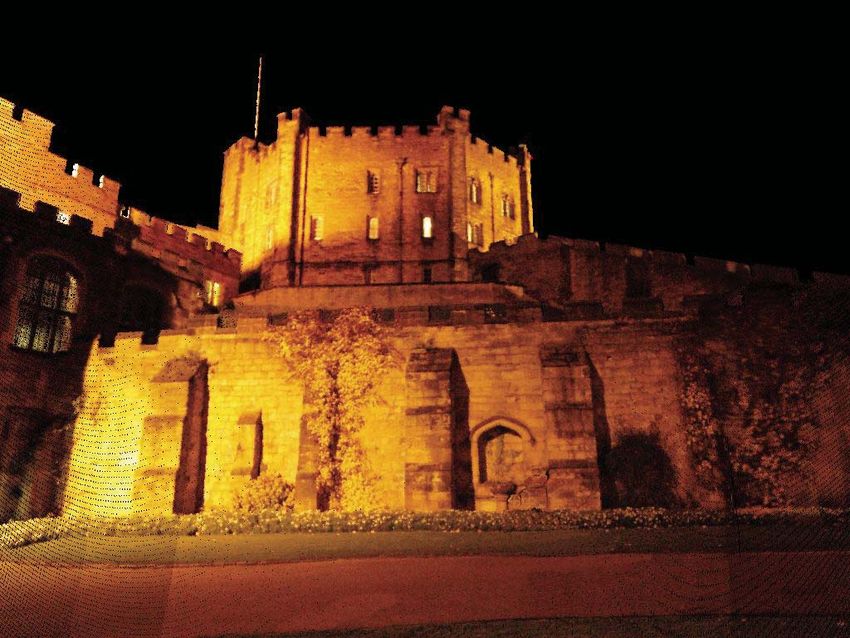
onto vertical and inclined planes. In the first field test illustrated here, part of Durham Castle was chosen
to provide a target with complicated geometry. For this test the laser scan-
ner chosen was a Riegl LMS-Z420i, which has its own in-built function
TABLE 1. FORM OF MAPPING FUNCTIONS for high-quality color matching through the use of a separate precision-
mounted digital SLR on top of the scanner. A 360° scan was acquired,
Camera horizontal Camera tilted consisting of 8 × 106 points. Two separate sets of photographs were
u = f (θ) u = f ( θ, ф ) acquired, to allow direct comparison between our method of color match-
v = f ( θ, ф) v = f (θ ,ф) ing and that provided by Riegl. The first set of 7 photographs was taken
Note: u—horizontal image pixel coordinate; with a top-mounted 6.1 mega-pixel Nikon D70 camera (giving a total of
v—vertical image pixel coordinate; θ—azimuth 42.7 × 106 pixels), following Riegl’s standard acquisition method for the
(horizontal) angle; ф—inclination (vertical) scanner. The scanner was then removed from the tripod, and a second set
angle. of 18 photos was taken using an 8 mega-pixel Canon EOS 350D together
with the camera mount and color matching method presented in this paper
(total pixels = 144 × 106). Figure 7 shows the quality of the colored point
cloud matching for part of the castle. Color matching is very precise in all
full mathematical derivation of the actual mapping functions is given in areas of the photos, including objects in the near foreground and far back-
the Appendix. ground (this is difficult to achieve when the camera is not collinear with
the scanner center, as in the top-mounted Riegl scanners). This benchmark
COREGISTRATION TOOLBOX test shows that the color matching method we present in this paper can
perform at least as well as high-end commercial solutions.
The Matlab programming environment was used to create a set of The second example shown here is from the Jurassic coastal cliff sec-
tools that can be used to carry out the registration process of a set of tions at Staithes, North Yorkshire. This site is part of a long-term project
photographs with its associated point cloud. The toolbox comprises a using laser scanning to monitor coastal erosion (Rosser et al., 2005; Lim
number of individual programs collectively controlled through a com- et al., 2005). In this test an MDL LaserAce 600 scanner and an Olympus
mon Graphical User Interface (GUI). The toolbox encompasses the fol- Camedia E-20P digital SLR camera were used. The results (Fig. 8) show
lowing functionality. that color matching has high precision, and that the addition of color to the
1. Loading and parsing of the raw ASCII laser scan point cloud file point cloud greatly increases the amount of geological detail visible in the
(comprising the x, y, and z Cartesian coordinates for each point). virtual outcrop model.
2. Conversion of the points from Cartesian coordinates to a spherical
reference frame with the center of the scanner (and camera) at the origin. ERROR ANALYSIS
The azimuth and inclination coordinates are calculated from the x, y, and
z coordinates using the following formulae: There are many stages in the data capture and image registration pro-
cesses, some of which introduce errors. Quantitative aspects of the fol-
lowing error analysis are specific to the MDL LaserAce 600 scanner and
⎛ x⎞
azimuth = arctan ⎜ ⎟ Olympus Camedia E-20P camera, but other scanner and camera combina-
⎝ y⎠ (1) tions are conceptually similar.
A significant source of error can arise because of dispersion of the scan-
and ner’s laser beam. The scanner assumes that the strongest part of the return-
⎛ z ⎞ ing beam originates from the center of the laser-beam footprint on the
inclination = arctan ⎜ 2 ⎟ . (2) target, but when the footprint overlaps areas of contrasting reflectance,
⎝ x +y ⎠
2
this concentric weighting is distorted. The effects of this error are usually
most noticeable at the edges of objects that have sky (or distant back-
3. Loading of the corrected (i.e., undistorted) images. ground beyond the range of the scanner) behind them, and is often seen as
4. Input of the tie-point coordinates. a band of sky-colored points (typically one point wide) extending around
Geosphere, June 2008 569
Downloaded from https://pubs.geoscienceworld.org/gsa/geosphere/article-pdf/4/3/564/3338879/i1553-040X-4-3-564.pdf
by guest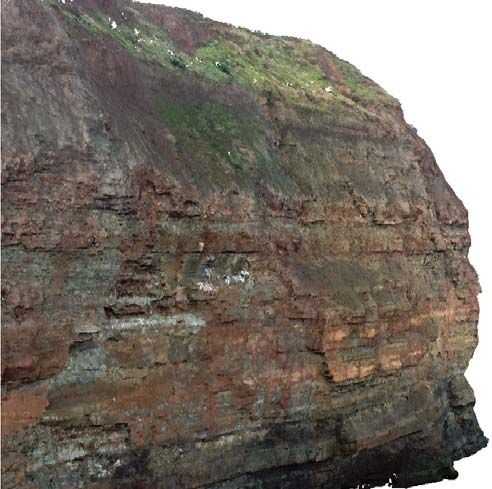
White and Jones
A B C
D
Figure 7. Colored point cloud of part of Durham Castle. (A) Screenshot of three-dimensional model visualized using ParaView software. (B)
Oblique view with areas of scan shadow. (C, D) Areas of detail where crenellations, buttresses, and windows reveal the quality of the color map-
ping. Vertical distance from courtyard to top of flag post is 49.4 m. Width of window lintel in (C) is 2.22 m. Height of wall in (D) is 6.05 m.
the edge of the scanned object. When a dispersed beam hits the edge of an Other sources of error relate to the discrepancy between the color of
object, part of the beam footprint is reflected and recorded by the scanner, the point in the point cloud and the color of the corresponding point in the
even though the center of the beam footprint was in the sky. The scanner subject, i.e., errors in the registration of the images with the point cloud.
therefore captures a data point beyond the edge of the object, even though In order to quantify the maximum registration error, approximate expres-
that point does not actually exist. When the resolution of the accompany- sions were derived for the angular errors at different stages in the capture
ing photo is high relative to the spacing of points in the point cloud, a thin and registration of the color information.
band of sky is mapped onto the extra trace of spurious points that flank The maximum angular registration error, αreg, is given by:
the true edge of the object. This source of error is common to all scanners
that have wide beam dispersion. It needs to be taken into consideration α reg = α pos + α rot + α rect + α tie , (3)
because the error is caused by an intrinsic property of the scanner, and is
not related to poor camera calibration or image matching. where αpos is the angular error due to positioning the center of the entrance
A second source of error can arise due to occlusion. Lim et al. (2005) pupil of the lens coincident with the beam detector of the laser scanner;
carried out an experiment using the same MDL LaserAce 600 scanner αrot is due to the deviation from vertical of the plate to which the camera
used to capture the point clouds in Figure 8. They scanned a section of attaches on the mount; αrect is the error in the rectification process using
cliff at 0.05° resolution twice in immediate succession and quantified the the GML toolbox; and αtie is due to the human judgment error in locating
discrepancies between the two scans due to occlusion errors. Occlusion the tie-points in the gray scale or false color point cloud. αpos and αrect were
errors are due to problems resulting from scanning a complex surface, quantified by making assumptions about the magnitude of tolerances and
in which some surface data are missed and, therefore, interpolated. The analytically deriving expressions for the resulting errors. αrot was deter-
errors, which are concentrated toward the edges of the scans and on pro- mined by empirically measuring the effect of an artificially applied rota-
truding ledges, occur due to the occluded data being interpolated differ- tion and αtie was based on empirical observation.
ently during successive scans. Despite these errors, Lim et al. (2005) stated When the expressions for these individual errors are substituted into the
that point cloud data acquired with the MDL LaserAce 600, over ranges above equation, the following expression is obtained for αreg, in degrees:
typically associated with scanning cliff faces, are capable of accuracies
within ±0.06 m. This error is the maximum error between the position of
⎛ 0.0025 ⎞
a subject point in space and the coordinates of the corresponding point in α reg ≈ arctan ⎜ + 0.45β + 0.017 + ( 0.5 − 0.45G ) ,
⎝ D ⎟⎠
(4)
the point cloud. The magnitude of this error is purely related to the scan-
ner; a higher quality scanner would give greater accuracy.
570 Geosphere, June 2008
Downloaded from https://pubs.geoscienceworld.org/gsa/geosphere/article-pdf/4/3/564/3338879/i1553-040X-4-3-564.pdf
by guest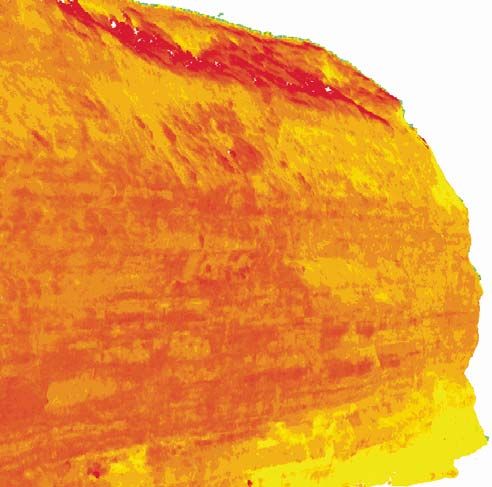
True color terrestrial laser scanning
A B
C D
Figure 8. Laser scan point cloud data from a project to monitor coastal erosion at Staithes, North Yorkshire (Rosser et al.,
2005). (A) Scanning the outcrop with an MDL LaserAce 600 scanner. (B) Gray scale point cloud based on the intensity of the
reflected laser beam. (C) False color red-yellow ramp applied to intensity values (replacing the gray scale) for each point. (D)
True color point cloud significantly helps to emphasize the geological detail in the outcrop. Height of cliff is 35.5 m.
where D is the distance to the subject in meters; β is the rotation of the αreg is conservative. With G equal to unity, by far the most significant term
camera from vertical in degrees; and G is a subjective “geometricity” in the above expression is αrot, contributing 57% of the maximum regis-
coefficient. For a subject with distinct geometric features, such as a simple tration error of 0.16° when β = 0.2° and D = 5 m, and 72% of the 0.25°
building, G would take the value 1, whereas for a very irregular subject, maximum registration error when β = 0.4° and D = 70 m. To combat this
such as a cliff face, G would take a value of 0. If necessary, however, αtie error, the camera mount design could be modified so that it is stiffened, in
can be virtually eliminated by adjusting the image registration by altering order to reduce the distortion due to the weight of the camera. Better still
the three mapping parameters. To obtain the approximate maximum regis- would be the addition of a mechanism for providing a fine adjustment to
tration error in terms of a number of points, αreg should be divided by the ensure that the camera is truly vertical. This would greatly reduce the rota-
resolution of the scanner in degrees. tion error, and therefore the registration error.
Although it was necessary to make some fairly crude assumptions in The above expression was derived to give an approximate maxi-
order to derive some of the individual errors, the resulting expression for mum limit on the registration error. In practice, the errors observed are
Geosphere, June 2008 571
Downloaded from https://pubs.geoscienceworld.org/gsa/geosphere/article-pdf/4/3/564/3338879/i1553-040X-4-3-564.pdf
by guest
White and Jones
significantly less than αreg over most of the point cloud. Over those areas The level of accuracy with which the photographs can be registered with
of the point cloud colored by pixels from near edges of the photographs, the point cloud is such that the resulting true color point cloud can support
the errors approach αreg. This error analysis will allow comparisons to be very detailed analysis and data interpretation for many applications. The
drawn with associated technologies, such as photogrammetry, as well as ability to adjust the registration of the photographs with the point cloud
helping to prevent inappropriate use of the data. has considerable benefits when scanning irregular subjects such as cliff
faces, which generally have few geometrically regular features.
CONCLUSIONS Detailed error analysis enables comparisons to be drawn with related
technologies, as well as with commercially available true color terrestrial
A low-cost true color terrestrial laser scanning (TCTLS) system has laser scanners. The accuracy of the registration is comparable with that of
been developed for use in a wide variety of applications. The low cost of commercially available TCTLS devices. This novel, low-cost, accurate,
this system makes TCTLS technology more financially viable to a larger and flexible TCTLS technology has the potential to make a significant
number of people in a greater range of fields. The flexibility of the system impact on the spatial data acquisition capabilities of many companies and
also provides a useful platform for further research into TCTLS to test per- academic institutions. We hope that this paper will provide the basis for
formance of a range of digital cameras, lenses, and laser scanner devices. further research and development in the fields of low-cost TCTLS and the
True color capability can be added to existing terrestrial laser scanners analytic mapping approach, and that it has the potential to lead to the com-
using a purpose-built camera mount and coregistration software. The camera mercial implementation of a user-friendly, low-cost, true color terrestrial
mount allows the photographs to be captured from exactly the same point as laser scanning system.
the point cloud and, in doing so, reduces one source of error present in some
commercial laser scanners that use top-mounted cameras. Using a digital APPENDIX
SLR, rather than onboard video circuitry mounted inside the scanner, pro-
vides higher resolution images, and gives more faithful chromatic data. First, the mapping functions for the horizontal case will be derived. These func-
The use of an adjustable camera mount, which takes a range of cam- tions are then extended to account for the case where the camera is tilted. Finally, a
method is determined for solving the resulting functions for a pair of tie-points for
eras, allows the user flexibility over the hardware used to capture the data. each image. Figure 9 shows the relationship between the laser scanner coordinate
Further work is under way to construct an automated system prototype system and the virtual image plane with its coordinate system. The laser scanner
that applies the same principles of image and/or scan coregistration to a center and the virtual image plane are separated by a virtual distance, d, perpen-
motorized version of the camera mount. dicular to the plane. θc is the angle from the azimuth zero line to the center of the
virtual image plane, and u' and v' define an alternative image coordinate system
The calibration of the camera is simple and quick, using a stiff planar with respect to an origin at the center of the virtual image plane.
checkered calibration target and standard camera calibration algorithms. Deriving an expression for u in the horizontal case, considering triangle OAC:
There is no requirement for the camera to be calibrated prior to taking the
photographs, and each camera and lens need only be calibrated once. The
u′
undistortion process is fast and allows a batch of images to be undistorted tan ( θ − θc ) = . (5)
with one click of a mouse. d
Figure 9. Relationship between the laser scanner and the virtual image plane in the case where the lens is
pointing horizontally. See text for definition of symbols.
572 Geosphere, June 2008
Downloaded from https://pubs.geoscienceworld.org/gsa/geosphere/article-pdf/4/3/564/3338879/i1553-040X-4-3-564.pdf
by guest
True color terrestrial laser scanning
Converting between u' and u: In order to derive expressions for u and v in the case where the camera is tilted at
an angle θc to the horizontal, the coordinate system shall be rotated by θc about the
y axis. The rotation matrix required to perform the rotation by angle φc about the
U
u′ = u − . (6) y axis is:
2
⎡ cos φ c 0 sin φ c ⎤
⎢ 0
Substituting for u' in equation 5:
⎢ 1 0 ⎥⎥ . (16)
u −U ⎢⎣ − sin φ c 0 cos φ c ⎥⎦
tan ( θ − θc ) = 2 . (7)
d
Rearranging:
U
u= + d tan ( θ − θc ) . (8)
2
Deriving an expression for v in the horizontal case, considering the triangle defined
by O, A, and the point (u, v):
v′
tan φ = . (9)
l
Considering triangle OAC:
d
cos ( θ − θc ) = . (10)
l
Rearranging:
l = d sec ( θ − θc ) . (11)
Converting between v' and v:
Figure 10. Relationship between the laser scanner and virtual image
V plane in the general case where the camera is tilted. See text for
v′ = − v . (12)
2 definition of symbols.
Substituting for v' and l in equation 9:
z
V −v
tan φ = 2
. (13)
d sec ( θ − θc )
(x,y,z)
Rearranging:
y
V
v= − d sec ( θ − θc ) tan φ . (14) ф
2
θc
θ
Next, the general case in which the camera can be tilted at an angle to the horizontal x
is considered. Figure 10 shows the relationship between the laser scanner coordi-
nate system and the image plane coordinate system in the tilted case.
First, converting between Cartesian coordinates and spherical polar coordinates
as defined in Figure 11:
⎡ x ⎤ ⎡ cos ( θ − θc ) cos φ ⎤
⎢ y ⎥ = ⎢ sin θ − θ cos φ ⎥ .
⎢ ⎥ ⎢ ( c)
(15) Figure 11. Relationship between Cartesian coordinate system and
⎥
⎢⎣ z ⎥⎦ ⎢⎣ ⎥ spherical polar coordinate system on a sphere of unit radius. See
sin φ ⎦ text for definition of symbols.
Geosphere, June 2008 573
Downloaded from https://pubs.geoscienceworld.org/gsa/geosphere/article-pdf/4/3/564/3338879/i1553-040X-4-3-564.pdf
by guestWhite and Jones
Therefore, premultiplying the matrix on the right side of equation 15 by the rotation
matrix above:
v=
V d ( sec ( θ − θc ) tan φ − tan φ c
−
) . (25)
2 1 + sec ( θ − θc ) tan φ tan φ c
⎡ cos ( θ′ − θc ) cos φ ′ ⎤ ⎡ cos φ c 0 sin φ c ⎤ ⎡ cos ( θ − θc ) cos φ ⎤
⎢ ⎥ ⎢ ⎢ ⎥
⎢ sin ( θ′ − θc ) cos φ ′ ⎥ = ⎢ 0 1 0 ⎥⎥ ⎢ sin ( θ − θc ) cos φ ⎥ Now a method of solution of equations 24 and 25 is described that can be imple-
mented algorithmically (e.g., in a Matlab program).
⎢ ⎥ 0 cos φ c ⎥⎦ ⎢⎣ ⎥
⎣ sin φ ′ ⎦ ⎢⎣ − sin φ c sin φ ⎦ For each image, if the u, v coordinates of two points in the image and the corre-
sponding θ, φ coordinates of the same two points in the point cloud are known, and
given the horizontal and vertical pixel dimensions of the image, then four equations
⎡ cos ( θ′ − θc ) cos φ ′ ⎤ ⎡ cos φ c cos ( θ − θ c ) cos φ + sin φ c sin φ ⎤ can be formed containing only three unknown mapping parameters, θc, φc, and d:
⎢ ⎥ ⎢ ⎥ . (17)
⎢ sin ( θ′ − θc ) cos φ ′ ⎥ = ⎢ sin ( θ − θc ) cos φ Tie-points (u1, v1, θ1, φ1) and (u2, v2, θ2, φ2):
⎥
⎢ sin φ ′ ⎥ ⎢ cos φ c sin φ − sin φ c cos ( θ − θc ) cos φ ⎥
⎣ ⎦ ⎣ ⎦
U d tan ( θ1 − θc ) sec φ c
u1 = + (26)
The equations corresponding to equations 8 and 14 for the tilted case are: 2 1 + sec ( θ1 − θc ) tan φ1 tan φ c
U
u= + d tan ( θ′ − θc )
2
(18) U d tan ( θ2 − θc ) sec φ c
u2 = + (27)
and 2 1 + sec ( θ2 − θc ) tan φ 2 tan φ c
V
− d sec ( θ′ − θc ) tan φ ′ . )
V d ( sec ( θ1 − θc ) tan φ1 − tan φ c
v= (19)
2 v1 = − (28)
2 1 + sec ( θ1 − θc ) tan φ1 tan φ c
Using equation 17 to express tan(θ'– θc) in terms of θ, φ, θc, and φc:
v2 =
V d ( sec ( θ2 − θc ) tan φ 2 − tan φ c
−
)
sin ( θ′ − θc ) cos φ ′ 1 + sec ( θ2 − θc ) tan φ 2 tan φ c
. (29)
tan ( θ′ − θc ) = 2
cos ( θ′ − θc ) cos φ ′
Only three of these equations are required in order to solve for the three mapping
parameters.
sin ( θ − θc ) cos φ If the three simultaneous nonlinear equations 26, 27, and 28 are rearranged
= . (20)
cos φ c cos ( θ − θc ) cos φ + sin φ c sin φ thus:
U d tan ( θ1 − θc ) sec φ c
Similarly, using equation 17 to express sec(θ'– θc) tan φ in terms of θ, φ, θc, and φc: f ( θc , φ c , d ) = − u1 + (30)
2 1 + sec ( θ1 − θc ) tan φ1 tan φ c
sin φ ′
sec ( θ′ − θc ) tan φ ′ =
cos ( θ′ − θc ) cos φ ′ U d tan ( θ2 − θc ) sec φ c
g ( θc , φ c , d ) = − u2 + (31)
2 1 + sec ( θ2 − θc ) tan φ 2 tan φ c
cos φ c sin φ − sin φ c cos ( θ − θc ) cos φ
=
cos φ c cos ( θ − θc ) cos φ + sin φ c sin φ
. (21)
h ( θc , φ c , d ) =
V
− v1 −
d ( sec ( θ1 − θc ) tan φ1 − tan φ c ) , (32)
2 1 + sec ( θ1 − θc ) tan φ1 tan φ c
Multiplying numerator and denominator of both the above expressions by sec φc
sec(θ – θc) sec φ: then they can be solved by using Newton’s method (http://numbers.computation
.free.fr/Constants/Algorithms/newton.html) in the following form:
tan ( θ − θc ) sec φ c
tan ( θ′ − θc ) = (22) ⎡ θc ⎤ ⎡ θc ⎤ ⎡ f ( θc , φ c , d ) ⎤
1 + sec ( θ − θc ) tan φ tan φ c
⎢ φ ⎥ = ⎢ φ ⎥ − J −1 θ , φ , d ⎢ g θ , φ , d ⎥ ,
⎢ c⎥ ⎢ c⎥ ( c c ) ⎢ ( c c )⎥ (33)
⎢⎣ d ⎥⎦ n +1 ⎢⎣ d ⎥⎦ n ⎢ h ( θc , φ c , d ) ⎥
sec ( θ − θc ) tan φ − tan φ c ⎣ ⎦n
sec ( θ′ − θc ) tan φ ′ = . (23)
1 + sec ( θ − θc ) tan φ tan φ c where J is the Jacobian matrix:
⎡ ∂f ∂f ∂f ⎤
Substituting for tan(θ´– θc) from equation 22 into equation 18, and for sec(θ′ – θc) ⎢ ⎥
tan φ′ from equation 23 into equation 19 to give expressions for u and v for the ⎢ ∂θc ∂φ c ∂d ⎥
tilted case: ⎢ ∂g ∂g ∂g ⎥
J ( θc , φ c , d ) = ⎢ ⎥
U d tan ( θ − θc ) sec φ c ⎢ ∂θc ∂φ c ∂d ⎥ . (34)
u= + (24) ⎢ ∂h ∂h ∂h ⎥
2 1 + sec ( θ − θc ) tan φ tan φ c ⎢ ⎥
⎣ ∂θc ∂φ c ∂d ⎦
574 Geosphere, June 2008
Downloaded from https://pubs.geoscienceworld.org/gsa/geosphere/article-pdf/4/3/564/3338879/i1553-040X-4-3-564.pdf
by guestTrue color terrestrial laser scanning
ACKNOWLEDGMENTS Labourdette, R., and Jones, R.R., 2007, Characterization of fluvial architectural elements
using a three dimensional outcrop dataset: Escanilla braided system—South-central
Pyrenees, Spain: Geosphere, v. 3, p. 422–434, doi: 10.1130/GES00087.1.
We thank John Parker for his help with the analytical mapping, and Nick Rosser,
Lim, M., Petley, D.N., Rosser, N.J., Allison, R.J., Long, A.J., and Pybus, D., 2005, Com-
Alan Purvis, David Toll, Roger Little, Nick Holliman, and Steve Waggott (Hal- bined digital photogrammetry and time-of-flight laser scanning for monitoring cliff
crow) for their help and insight. We also thank Jerry Bellian and Klaus Gessner for evolution: Photogrammetric Record, v. 20, no. 110, p. 109–129, doi: 10.1111/j.1477-
useful reviews, as well as Tim Wawrzyniec and Randy Keller for editorial input. 9730.2005.00315.x.
Aspects of material presented in this paper are protected under UK and Interna- Løseth, T.M., Thurmond, J., Søegaard, K., Rivenæs, J.C., and Martinsen, O.J., 2003, Build-
tional Patent laws. ing reservoir model using virtual outcrops: A fully quantitative approach: American
Association of Petroleum Geologists, International Meeting, Programs with Abstracts,
Salt Lake City, Utah, May 9–14.
REFERENCES CITED
McCaffrey, K.J.W., Jones, R.R., Holdsworth, R.E., Wilson, R.W., Clegg, P., Imber, J., Hol-
liman, N., and Trinks, I., 2005, Unlocking the spatial dimension: Digital technologies
Abdelhafiz, A., Riedel, B., and Niemeier, W., 2005, Towards a 3D true coloured space by the and the future of geoscience fieldwork: Geological Society [London] Journal, v. 162,
fusion of laser scanner point cloud and digital photos, in El-Hakim, S., et al., eds., Vir- p. 927–938, doi: 10.1144/0016-764905-017.
tual reconstruction and visualization of complex architectures: International Archives of Prescott, B., and McLean, G.F., 1997, Line-based correction of radial lens distortion: Graphical
Photogrammetry, Remote Sensing, and Spatial Information Sciences, v. 36, part 5/W17, Models and Image Processing, v. 59, no. 1, p. 39–47, doi: 10.1006/gmip.1996.0407.
http://www.commission5.isprs.org/3darch05/pdf/31.pdf (August 30, 2007). Poropat, G.V., 2001, New methods for mapping the structure of rock masses, in Proceedings,
Abmayr, T., Härtl, F., Mettenleiter, M., Heinz, I., Hildebrand, A., Neumann, B., and Fröhlich, Australian Institute of Mining and Metallurgy Conference, EXPLO2001, Hunter Valley,
C., 2004, Realistic 3D reconstruction—Combining laserscan data with RGB color NSW, Australia.
information: International Archives of Photogrammetry, Remote Sensing, and Spa- Pringle, J.K., Clark, J.D., Westerman, A.R., Stanbrook, D.A., Gardiner, A.R., and Morgan,
tial Information Sciences, v. 35, part B5, http://www.isprs.org/istanbul2004/comm5/ B.E.F., 2001, Virtual outcrops: 3-D reservoir analogues, in Ailleres, L., and Rawling, T.,
papers/549.pdf (August 30, 2007). eds., Animations in geology: Journal of the Virtual Explorer, v. 3, http://virtualexplorer
Abmayr, T., Dalton, G., Hines, D., Liu, R., Härtl, F., Hirzinger, G., and Fröhlich, C., 2005, .com.au/journal/2001/04/pringle/
Standardization and visualization of 2.5D scanning data and color information by Pringle, J.K., Westerman, A.R., Clark, J.D., Drinkwater, N.J., and Gardiner, A.R., 2004, 3D
inverse mapping, in Proceedings, Conference on Optical 3D Measurement Techniques, high-resolution digital models of outcrop analogue study sites to constrain reservoir
7th, Vienna, Austria: TU Wien, p. 164–173. model uncertainty: An example from Alport Castles, Derbyshire, UK: Petroleum Geo-
Ahlgren, S., and Holmlund, J., 2002, Outcrop scans give new view: American Association of science, v. 10, p. 343–352.
Petroleum Geologists Explorer, p. 22–23. Pringle, J.K., Hodgetts, D., Howell, J.A., and Westerman, A.R., 2006, Virtual outcrop models
Balis, V., Karamitsos, S., Kotsis, I., Liapakis, C., and Simpas, N., 2004, 3D-laser scanning: Inte- of petroleum reservoir analogues—A review of the current state-of-the-art: First Break,
gration of point cloud and CCD camera video data for the production of high resolution v. 24, p. 33–42.
and precision RGB textured models: Archaeological monuments surveying application Rosser, N.J., Petley, D.N., Lim, M., Dunning, S.A., and Allison, R.J., 2005, Terrestrial
in ancient Ilida, in Proceedings, FIG Working Week, Athens, Greece, May 22–27, 2004: laser scanning for monitoring the process of hard rock coastal cliff erosion: Engi-
http://www.fig.net/pub/athens/papers/wsa2/WSA2_5_Balis_et_al.pdf (August 30, 2007). neering Geology and Hydrogeology Quarterly Journal, v. 38, p. 363–375, doi:
Barber, D.M., Dallas, R.W.A., and Mills, J.P., 2006, Laser scanning for architectural conser- 10.1144/1470-9236/05-008.
vation: Journal of Architectural Conservation, v. 12, p. 35–52. Shih, S.W., Hung, Y.P., and Lin, W.S., 1995, When should we consider lens distor-
Bellian, J.A., Kerans, C., and Jennette, D.C., 2005, Digital outcrop models: Applications of tion in camera calibration: Pattern Recognition, v. 28, no. 3, p. 447–461, doi:
terrestrial scanning lidar technology in stratigraphic modelling: Journal of Sedimentary 10.1016/0031-3203(94)00107-W.
Research, v. 75, p. 166–176, doi: 10.2110/jsr.2005.013. Slob, S., and Hack, R., 2004, 3D terrestrial laser scanning as a new field measurement and
Bellian, J.A., Beck, R., and Kerans, C., 2007, Analysis of hyperspectral and lidar data: monitoring technique, in Hack, R., et al., eds., Engineering geology for infrastructure
Remote optical mineralogy and fracture identification: Geosphere, v. 3, p. 491–500, planning in Europe: Berlin, Springer Verlag, p. 179–189.
doi: 10.1130/GES00097.1. Slob, S., van Knapen, B., Hack, R., Turner, K., and Kemeny, J., 2005, A method for auto-
Dunn, M.C., 2005, Laser scanning for everyday work: American Surveyor, January/February, mated discontinuity analysis of rock slopes with three-dimensional laser scanning:
http://www.theamericansurveyor.com/toc2-05.php (August 30, 2007). Transportation Research Record, no. 1913(2005)1, p. 187–208.
El-Hakim, S., Remondino, F., and Gonzo, L., eds., 2005, Virtual reconstruction and visu- Thies, M., Koch, B., Spiecker, H., and Weinacker, H., eds., 2004, Laser-scanners for forest and
alisation of complex architectures: International Archives of Photogrammetry, Remote landscape assessment: Proceedings of the ISPRS working group VIII/2: International
Sensing, and Spatial Information Sciences, v. 36, part 5/W17, http://www.commission5 Archives of Photogrammetry, Remote Sensing, and Spatial Information Sciences, v. 36,
.isprs.org/3darch05/ (August 30, 2007). part 8/W2, http://www.isprs.org/commission8/workshop_laser_forest/ (August 30, 2007).
Grammatikopoulos, L., Kalisperakis, I., Karras, G., Kokkinos, T., and Petsa, E., 2004, On Trinks, I., Clegg, P., McCaffrey, K.J.W., Jones, R.R., Hobbs, R., Holdsworth, R.E., Holli-
automatic orthoprojection and texture-mapping of 3D surface models: International man, N., Imber, J., Waggott, S., and Wilson, R., 2005, Mapping and analysing virtual
Archives of Photogrammetry, Remote Sensing, and Spatial Information Sciences, v. 35, outcrops: Visual Geosciences, v. 10, no. 1, p. 13–19, http://www.springerlink.com/
part B5, http://www.isprs.org/istanbul2004/comm5/papers/579.pdf (August 30, 2007). openurl.asp?genre=article&id=doi:10.1007/s10069-005-0026-9 (August 30, 2007),
Haneberg, W.C., 2004, A rational probabilistic method for spatially distributed landslide doi: 10.1007/s10069–005–0026–9.
hazard assessment: Environmental & Engineering Geoscience, v. 10, p. 27–43, doi: Tsai, R.Y., 1987, A versatile camera calibration technique for high-accuracy 3D machine
10.2113/10.1.27. vision metrology using off-the-shelf TV cameras and lenses: IEEE Journal on Robotics
Heikkilä, J., and Silvén, O., 1997, A four-step camera calibration procedure with implicit image and Automation, v. 3, no. 4, p. 323–344.
correction, in Proceedings, IEEE Computer Society Conference on Computer Vision and Pat- Vezhnevets, V., and Velizhev, A., 2005, GML C++ Camera Calibration Toolbox v. 0.31:
tern Recognition (CVPR’97), June 17–19, 1997, San Juan, Puerto Rico, p. 1106–1112. Graphics & Media Lab, Moscow State University, http://research.graphicon.ru/
Hunter, G., Cox, C., and Kremer, J., 2006, Development of a commercial laser scanning calibration/gml-c++-camera-calibration-toolbox.html.
mobile mapping system—StreetMapper, in Everaerts, J., ed., The future of remote sens- Vezhnevets, V., and Velizhev, A., 2006, GML C++ Camera Calibration Toolbox v. 0.4:
ing: International Archives of Photogrammetry, Remote Sensing, and Spatial Informa- Graphics & Media Lab, Moscow State University, http://research.graphicon.ru/
tion Sciences, v. 36, part 1/W44, http://www.pegasus4europe.com/pegasus/workshop/ calibration/gml-c++-camera-calibration-toolbox.html.
documents/contributions/Hunter_full.pdf (August 30, 2007). Waggott, S., Clegg, P., and Jones, R., 2005, Combining terrestrial laser-scanning, RTK GPS
Jacobs, G., 2005, Laser scanning today: “Another Tool in the Kit”: Professional Surveyor and 3D visualisation: Application of optical 3D measurement in geological explora-
Magazine, v. 25, no. 1, http://www.profsurv.com/archive.php?issue=96&article=1361 tion, in Proceedings, Conference on Optical 3D Measurement Techniques, 7th, Vienna,
(August 30, 2007). Austria: TU Wien.
Jones, R.R., McCaffrey, K.J.W., Wilson, R.W., and Holdsworth, R.E., 2004, Digital field Xu, X., Aiken, C., Bhattacharya, J., Corbeanu, R., Nielsen, K., McMechan, G., and Abdel-
data acquisition: Towards increased quantification of uncertainty during geological salam, M., 2000, Creating virtual 3-D outcrop: The Leading Edge, v. 19, no. 2,
mapping, in Curtis, A., and Wood, R., eds., Geological prior information: Geological p. 197–202, doi: 10.1190/1.1438576.
Society [London] Special Publication 239, p. 43–56. Zhang, Z.Y., 2000, A flexible new technique for camera calibration: IEEE Transactions
Jones, R.R., McCaffrey, K.J.W., Imber, J., Wightman, R., Smith, S.A.F., Holdsworth, R.E., on Pattern Analysis and Machine Intelligence, v. 22, no. 11, p. 1330–1334, doi:
Clegg, P., De Paola, N., Healy, D., and Wilson, R.W., 2008, Calibration and validation 10.1109/34.888718.
of reservoir models: the importance of high resolution, quantitative outcrop analogues,
in Griffith, P., et al., eds., The future of geological modelling in hydrocarbon develop-
ment. Geological Society [London] Special Publication xxx, (in press).
Kerr, D.A., 2005, The proper pivot point for panoramic photography: http://doug.kerr.home.
att.net/pumpkin/Pivot_Point.pdf (August 30, 2007).
Kokkalas, S., Jones, R.R., McCaffrey, K.J.W., and Clegg, P., 2007, Quantitative fault analysis MANUSCRIPT RECEIVED 17 SEPTEMBER 2007
at Arkitsa, central Creece, using terrestrial laser-scanning (“LiDAR”): Geological Soci- REVISED MANUSCRIPT RECEIVED 8 DECEMBER 2007
ety of Greece Bulletin, v. XXXVII. MANUSCRIPT ACCEPTED 29 JANUARY 2008
Geosphere, June 2008 575
Downloaded from https://pubs.geoscienceworld.org/gsa/geosphere/article-pdf/4/3/564/3338879/i1553-040X-4-3-564.pdf
by guestYou can also read