HBK-608FP-EU2 CIRCUIT BOARD - TECHNICAL DOCUMENTATION - ITOH DENKI
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below

Circuit Board HBK-608FP-EU2 Technical documentation
Summary
1. Presentation of the PowerMoller range Page 3
2. Presentation of the circuit board Page 4
General description
Electric diagram
General specifications
Dimensions
3.Technical data with PM605KT motorized roller Page 6
PM605KT - Speed code 15
PM605KT - Speed code 28
PM605KT - Speed code 55
4. Location and specifications of items Page 9
Location of items
Specifications of connectors
Connector CN1 - 24 VDC power supply
Connectors CN101-CN201 - Motor
Connectors CN301-CN401 - Sensor
Connectors CN302-CN402 - Communication cable
Connector CN4 - Input / Output (I/O)
Led display - PWR
Leds CTRL and SEN A/B
Leds MOT A/B and STS A/B
Output error signal
Types of errors and solutions
Dip-switches SW1 - Selection and configuration of functions
Dip-switches SW2 - Selection and configuration of functions
Rotary dip-switches SW3 and SW4
Rotary dip-switch SW5
Forced control
5. Timers Page 23
Run holding timer
Sensor timer
Jam timer
Initialisation
6. Functions and settings Page 25
Transfer modes
Synchronization
Odd number of motorized rollers
«Forced stop» function
«Forced start» function
Setting logic flow direction relative to load move direction
Setting motorized rotation direction relative to logic flow direction
Speed setting
Example of setting SW and I/O signals
Annexe 1 : Incorporation declaration Page 35
HBK-608FP-EU2 Technical documentation
2 Original notice - T1.8
1. Presentation of the Power Moller® product range
solutions
Controls Motorized rollers Modules
Standard circuit board DC Brushless 90° transfer
HBR-605
CB016 CB016B F-RAT-S250 CBM-105
CBR-306
CBM-105 HBR-605
F-RAT-S300 CBM-105
External Integrated CBR-306
Replacing
CBK-109 CBK-109B CB030
circuit board circuit board CBK-109
CB016B
F-RAT-NX75 HBM-201
CB018 IB-E
IB-P
CBV-108
45° transfer
ZPA circuit board
CBM-105
POP-UP CBR-306
HB510 HB510B Ø50 Ø50
CBM-105
HBK-608 PM500 FE
B&W AS-i 3.0
HB510 PM500 XE Wenglor
IB-E
HBV-609 CBV-108 B&W AS-i 3.0
PM500 VE HBV-609 PM500 XP Wenglor
IB-P
PEPPERL-FUCHS
PM500 FE-B
CB016B PM500 XK AS-Interface
HB510B B&W AS-i 3.0
Module circuit board
PEPPERL-FUCHS
PM500 XC AS-Interface
Ø60,5 B&W AS-i 3.0
HBR-605
CBM-105
CBR-306 PM605 FE HB510
Ø60,5
IB-E
CBV-108 B&W AS-i 3.0
HBM-201 PM605 VE HBV-609 PM605 XE Wenglor
IB-P
B&W AS-i 3.0
PM605 FE-B
CB016B PM605 XP Wenglor
HB510B
Network controller
CBK-109
HBK-608
PM605 KT IB-P
IB-E IB-E
PM605 KT-B CBK-109B
IB-P
Ø32
PM320 HS CB018
Corresponding circuit board Compatible module / sensor Max load to be conveyed Mechanical brake version
HBK-608FP-EU2 Technical documentation
3 Original notice - T1.82. Presentation of the circuit board
The circuit board HBK-608 with control logic of zones (Zero Pressure Accumulation ZPA) allows traceability
of load to transport. It can control 1 or 2 motorized roller, with the possibility of selecting the acceleration or
deceleration time. This function is useful for transferring pallets loaded in height in the best conditions.
General description
• Fasteners
- 2 M4 x 15 cross-head screws
- 2 M4 washers
- 2 M4 nuts
• 1 connector WAGO 231-302/026-000 (2 points)
• 1 connector WAGO 733-106 (6 points) (in option)
• 2 connectors WAGO 733-103 (3 points)
• 1 communication cable (in option)
Compatible motorized rollers serie : Serie PM605KT
The circuit board HBK-608FP could be associated with 1 or 2 motors.
Electric diagram
Motorized roller
Free roller
Sensor
Communication cable
Circuit board
MOTOR B
MOTOR A
Synchronization Motor B / Output sensor
Synchronization Motor A / Output sensor
Output error
Start / Stop forced Motor B
Start / Stop forced Motor A
Direction / Reset Error
HBK-608FP-EU2 Technical documentation
4 Original notice - T1.8General specifications
Nominal voltage 24VDC ± 10%
Static current 0.6A
Current limitation 7A
Motor acceleration time 200ms
Protection index IP20
Protection Integrated 10A fuse
Against inversion of polarity (24 V and 0 V)
Thermal protection (95°C for the circuit board, 105°C for the motor)
Input voltage on connector CN2 < 1V for NPN
if different to 0 or 24V > 15V for PNP
Sensor input (sensor not supplied) NO contact (normally open), 24 V, max. 35 mA
Power supply TBTS 24VDC ± 10% - ripple < 10%
A stabilised power supply is recommended
Environment Temperature range 0 / +40 °C
Relative humidity < 90% condensation-free (avoid thermal shocks)
Neither corrosive nor explosive atmosphere
Vibrations3. Technical datas for motorized roller PM605KT
PM605KT - Speed code 15
Tangential force Torque Current
V (m/min)
(N) (Nm) (A) Rated output Rated input
SW3/4
(W) (W)
No load Nominal Starting Nominal Starting No load Nominal Starting
9 17,2 155,7 4,71 0,8 3,2 52 77
8 15,8 155,7 4,71 0,7 2,9 48 71
7 14,3 155,7 4,71 0,7 2,7 43 64
6 12,9 155,7 4,71 0,6 2,5 39 59
5 11,5 155,7 4,71 0,6 2,2 35 54
884,5 26,75 7,0
4 10,0 155,7 4,71 0,5 2,0 30 47
3 8,6 155,7 4,71 0,5 1,7 26 42
2 7,2 155,7 4,71 0,4 1,5 22 36
1 5,7 155,7 4,71 0,4 1,3 17 30
0 4,3 155,7 4,71 0,3 1,1 14 27
Reduction ratio : 1/54,87
PM605KT (Nominal speed:
15) with HBK - 608
20 8.00
Speed vs Tangen�al force Current vs Tangen�al force
18
17.2m/min 7.00
16
6.00
17.2m/min
14
12.9m/min
5.00
12
Speed[m/min]
12.9m/min
Current[A]
10 8.6m/min 4.00
8.6m/min
8
3.00
4.3m/min
6
4.3m/min 2.00
4
1.00
2
0 0.00
0 100 200 300 400 500 600 700 800 900 1000
Tangen�al force[N]
HBK-608FP-EU2 Technical documentation
6 Original notice - T1.8PM605KT - Speed code 28
Tangential force Torque Current
V (m/min)
(N) (Nm) (A) Rated output Rated input
SW3/4
(W) (W)
No load Nominal Starting Nominal Starting No load Nominal Starting
9 35,0 76,6 2,32 0,8 3,2 52 77
8 32,1 76,6 2,32 0,7 2,9 48 71
7 29,2 76,6 2,32 0,7 2,7 43 64
6 26,2 76,6 2,32 0,6 2,5 39 59
5 23,3 76,6 2,32 0,6 2,2 35 54
435,2 13,16 7,0
4 20,4 76,6 2,32 0,5 2,0 30 47
3 17,5 76,6 2,32 0,5 1,7 26 42
2 14,6 76,6 2,32 0,4 1,5 22 36
1 11,7 76,6 2,32 0,4 1,3 17 30
0 8,7 76,6 2,32 0,3 1,1 14 27
Reduction ratio : 1/27
PM605KT (Nominal speed:
28) with HBK - 608
40 8.00
Speed vs Tangen�al force Current vs Tangen�al force
35m/min
35 7.00
30 35m/min 6.00
26.2m/min
25 5.00
26.2m/min
Speed[m/min]
Current[A]
17.5m/min
20 4.00
17.5m/min
15 3.00
8.7m/min
10 2.00
8.7m/min
5 1.00
0 0.00
0 50 100 150 200 250 300 350 400 450 500
Tangen�al force[N]
HBK-608FP-EU2 Technical documentation
7 Original notice - T1.8PM605KT - Speed code 55
Tangential force Torque Current
V (m/min)
(N) (Nm) (A) Rated output Rated input
SW3/4
(W) (W)
No load Nominal Starting Nominal Starting No load Nominal Starting
9 65,4 43,1 1,30 0,8 3,2 52 77
8 60,0 43,1 1,30 0,7 2,9 48 71
7 54,5 43,1 1,30 0,7 2,7 43 64
6 49,1 43,1 1,30 0,6 2,5 39 59
5 43,6 43,1 1,30 0,6 2,2 35 54
245,0 7,41 7,0
4 38,2 43,1 1,30 0,5 2,0 30 47
3 32,7 43,1 1,30 0,5 1,7 26 42
2 27,2 43,1 1,30 0,4 1,5 22 36
1 21,8 43,1 1,30 0,4 1,3 17 30
0 16,3 43,1 1,30 0,3 1,1 14 27
Reduction ratio : 1/14,44
PM605KT (Nominal speed:
55) with HBK - 608
70 8.00
65.4m/min Speed vs Tangen�al force Current vs Tangen�al force
7.00
60
65.4m/min
6.00
50
49.1m/min
5.00
49.1m/min
Speed[m/min]
40
Current[A]
32.7m/min
32.7m/min 4.00
30
3.00
16.3m/min
20
2.00
16.3m/min
10
1.00
0 0.00
0 50 100 150 200 250 300
Tangen�al force[N]
HBK-608FP-EU2 Technical documentation
8 Original notice - T1.84. Location and specifications of items
Location of items
STS A / MOT A
STS B / MOT B
PWR
CTRL / SEN A / SEN B
Connectors et switch Leds
CN1 Supply connector 24VDC CTRL Supply to the logic board
CN101-201 Connector motor 12 pins PWR Supply circuit board
CN301-401 Connector sensor MOT A / MOT B Motor A/B connected and ready
CN302-402 Connector communication cable STS A / STS B State motor A/B
CN4 Connector Input/Output (I/O) SEN A / SEN B Visualization sensor state
SW1 Dip switch 1
SW2 Dip switch 2
SW3-SW4 Rotary switch (fixed speed selection)
SW5 Rotary switch (temporisation selection)
Connector specifications
Circuit board side Cable side
WAGO 231-302 (I = 10A max)
Supply 24VDC - CN1 WAGO 231-532
Wire cross-section 0,08~2,5mm² (AWG : 28~12)
WAGO 733-103 (I = 4A max)
Sensor CN301-401 WAGO 733-363
Wire cross-section 0,08~0,5mm² (AWG : 28~20)
Input / Output CN4 WAGO 733-106 (I = 4A max)
WAGO 733-336
Option Wire cross-section 0,08~0,5mm² (AWG : 28~20)
HBK-608FP-EU2 Technical documentation
9 Original notice - T1.8Connector CN1 - 24VDC power supply
• 24 V dc switch-mode power supply, which can accept an
overcurrent of 150% for 3 to 5 s, is recommended.
• The +24 V dc circuit is protected by a 7A fuse.
• Connector WAGO 231-302, wire-cross section 2,5mm² max
(AWG : 28~12)
0 VDC Provide a power supply that is sufficiently powerful in function of
24 VDC serie, type, operation and number of motorized rollers to be powered
simoultaneously.
CN1
The stabilized power supplies 24V shall be sized according to the number of motorized rollers that shall work. It is
possible to link some group of motorized rollers to the power supplies. These groups being link together thanks to
communication cable.
Circuit board Switch point Communication cable
HBK608 HBK608 HBK608 HBK608 HBK608 HBK608 HBK608 HBK608 HBK608
Supply wiring
Supply Supply
N N+1
It is mandatory to link the 0V in between the power supplies. They shall be controlled simoultaneously to avoid
creating problem in transition point.
Make sure that the power supply is OFF befor plugging / unplugging the motor connector CN101-CN201.
Don’t stop the motorized roller operating by powering off the circuit board.
HBK-608FP-EU2 Technical documentation
10 Original notice - T1.8Connectors CN101-CN201 - Motor
CN101
CN201
• CN101 : Connector motor A
• CN201 : Connector motor B
• Connector JST XHP-12 - 12 pins
Do not disconnect the motor connector during operating.
Connectors CN301-CN401 - Sensor
0V
24V
IN
IN
24V
0V
CN301
CN401
Use a sensor type NO (open contact)
• Connector WAGO 733-103, wire-cross section 0,08 - 0,5 mm² max (AWG : 28~20)
• Current max : 35mA
• CN301 : Zone A
• CN401 : Zone B
HBK-608FP-EU2 Technical documentation
11 Original notice - T1.8Connectors CN302-CN402 - Communication cable
CN302 CN402
CN402
Flow direction
Communication
cable
CN302
Always connect the connector CN302 circuit
board to the connector CN402 of another circuit
board..
• Cables with connector RJ45 Cat 5e (in option)
Cable lengths (mm) Reference
The communication cable must not be
1000 CCOM-HB5X-1000
connected to the circuit board of the last zone.
2000 CCOM-HB5X-2000
3000 CCOM-HB5X-3000
It ensures :
- State sensor reception and transmission, start / stop of motor located upstream or downstream of the
zone concerned.
- Transmission of flow direction signal, reset error signal all circuit boards interconnected.
- Reception and transmission of error signal, impulse signal.
Number of HBK-608 to connect by communication cable is not limited, but delay time accrued :
- by error signals (3ms to 15 ms per error signal according to type and per circuit board)
- by flow direction signal «DIR» (20ms per circuit board)
- by Reset signal (20ms per circuit board)
HBK-608FP-EU2 Technical documentation
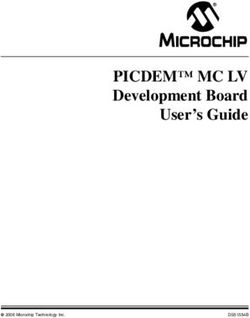
12 Original notice - T1.8Connector CN4 - Inputs / outputs (I/O)
• Connector WAGO 733-106, Wire cross-section 0,08-
0,5mm² (AWG : 28-20)
• Input signal : 7,3mA
• Output signal : open collector 25mA max.
CN4
Termi- Function Indication Description
nal
Reverse load transfer direction and logic
OFF (no signal) = load transfer direction and logic from right to left (circuit board
Transfer and logic
DIR front view)
direction
Terminal ON (24V signal) = load transfer direction and logic from left to right (circuit board
1 front view)
Signal to reset the error
Reset error RST Sent a 24V signal at least 100 ms to reset error
This signal is sent to all the circuit board linked by communication cable
Terminal Start / Forced Forced start or stop of Motor A (see configuration SW2-3) with input on connector
STOP/RUN A
2 Stop Motor A CN4-2
Terminal Start / Forced Forced start or stop of Motor B (see configuration SW2-4) with input on connector
STOP/RUN B
3 Stop Motor B CN4-3
Sent signal when a d’un signal when a fault occurs
Terminal Type of signal depend on selector SW1-8
Error ERR*
4 If SW1-8 = ON Impulse output to identify the error with PLC
If SW1-8 = OFF Sent signal when a fault occurs
Synchronization Signal sent when Motor A start to synchronize another motorized roller (see confi-
Terminal with Motor A guration SW2-1)
OUT A*
5 State sensor zone Signal sent when the object is detected by sensor of zone A
A (see configuration SW2-1)
Synchronization Signal sent when Motor B start to synchronize another motorized roller (see confi-
Terminal with Motor B guration SW2-2)
OUT B*
6 State sensor zone Signal sent when the object is detected by sensor of zone B
B (see configuration SW2-2)
* If output is connected to inductive load (Ex. Relay coil , solenoid , actuator , etc . ), make sure to protect output from Back voltage with
a free-wheeling diode.
Internal circuit diagram
Output signal
Terminals 5 and 6
Input signal
Terminals 1~4
HBK-608FP-EU2 Technical documentation
13 Original notice - T1.8Led display - PWR
On
Off
Flashing at 1Hz
Flashing at 6Hz
Flashing at 6Hz and off alternate
Green Led State
LED PWR Circuit board unpowered
6 Hz Off 6 Hz
Circuit board powered 0,25s 1,5s 0,25s
Leds CTRL and SEN A/B
LEDS
Indication LED
LED State
Green Orange
Circuit board unpowered
CTRL
Circuit board powered
Sensor OFF. No load on zone A
SEN A Sensor ON. Load presence on zone A
Jam default on zone A
Sensor OFF. No load on zone B
SEN A Sensor ON. Load presence on zone B
Jam default on zone B
HBK-608FP-EU2 Technical documentation
14 Original notice - T1.8Leds MOT A/B and STS A/B
LEDS
Indication LED
LED State
Green Red
Motor A stopped
Motor A run
Low voltage default / Fuse out of order
STS A Motor A disconnected
Blocking motor A
Thermal fault (circuit board or motor)
Induced current default
No motor A connected
MOT A
Motor A connected and ready
Motor B stopped
Motor B run
Low voltage default / Fuse out of order
STS B Motor B disconnected
Blocking motor B
Thermal fault (circuit board or motor)
Induced current default
No motor B connected
MOT B
Motor B connected and ready
HBK-608FP-EU2 Technical documentation
15 Original notice - T1.8«Error signal» output
Terminal 4 of connector CN4-4 sent error signal depends of type of output signal selected by SW1-8 :
ON
SW1-8 «ON» : impulse output
OFF
SW1-8 «OFF» : sent 24V signal when a fault appears , on logic PNP (SW1-3 «ON»)
SW1-8
SW1-3
CN4
12 3 45 6
Error signal
In the case of impulse output, priority order and frequency depending on the type of error are:
Priority Type of error Frequency (ms)
1 Low power supply voltage default 40
2 Connexion motor default 60
3 Blocking motor default 80
4 Circuit board thermal fault 100
5 Motor thermal fault 120
6 Induced voltage defeult 140
7 Jam error 160
Reset error signal occurs :
- Or by injection of the signal «RST» on terminal CN4-1, with SW1-1 position on «ON»
ON
SW1-1
CN4
12 3 45 6
Must be injected ≥100ms
- Or by «Start / Stop forced» on terminals CN4-2 or CN4-3, with SW5 position on «0»
SW5 : 0
CN4
12 3 45 6
Start / Stop
HBK-608FP-EU2 Technical documentation
16 Original notice - T1.8Types of errors and solutions
Symptoms Reset error signal
Type of error Solution
Causes Restart motorized roller
Low power Injection signal «RST» on terminal CN4-1 or
Voltage ≤15VDC for more Secure the supply
supply voltage «Start / Stop forced»
than 0.1s voltage above 18VDC
Alimentation
default on terminals CN4-2 or CN4-3
Overvoltage over 40 VDC Get off the motorized Injection signal «RST» on terminal CN4-1 or
Induced
for 2 seconds or more roller voltage below «Start / Stop forced»
voltage default
60VDC for 0.1s 30 VDC on terminals CN4-2 or CN4-3
Fuse out of
Turn off the power and replace the circuit board
order
Injection signal «RST» on terminal CN4-1 or
Echauffement
Circuit board Circuit board temperature
«Start / Stop forced»
thermal fault above 95 ° C.
Stop the motorized on terminals CN4-2 or CN4-3
roller and let it cool Injection signal «RST» on terminal CN4-1 or
Motor thermal Motor temperature above
«Start / Stop forced»
fault 105 ° C.
on terminals CN4-2 or CN4-3
Motorized roller Injection signal «RST» on terminal CN4-1 or
Motorized roller Connect the
connexion «Start / Stop forced»
disconnected motorized roller
default on terminals CN4-2 or CN4-3
Injection signal «RST» on terminal CN4-1 or
Autres
Blocking Motorized roller blocked
«Start / Stop forced»
motorized roller for more than 0.5s
on terminals CN4-2 or CN4-3
Injection signal «RST» on terminal CN4-1 or
Jam error Jam Timer activated «Start / Stop forced»
on terminals CN4-2 or CN4-3
HBK-608FP-EU2 Technical documentation
17 Original notice - T1.8Dip-switches SW1 - Selection and configuration of functions
SW1
ON
1 2 3 4 5 6 7 8
Initial
Dip switches SW1 Function ON OFF
setting
OFF
1 DIR / RST Inversion logic direction / Reset error Reset error Direction
ON
2 ACC / DEC Selection Acceleration / Deceleration time 1,0s 0,4s
ON
PNP NPN
3 NPN / PNPOUT Selection of output signal logic
(HBK-608FP) (HBK-608FN)
Load transfer Load transfer OFF
4 ZP2 / ZP1 Mode ZPA train mode singulated mode
(ZP2) (ZP1)
ON
5 DIRECTION A Selection direction of rotation motor A
See table page 23
«Direction of rotation»
ON
6 DIRECTION B Selection direction of rotation motor B
1 zone
Number of zone on the circuit board OFF
(In this case,
7 ZONE 2/1 (Selection change considered only after a restart of 2 zones
connect to Zone
the circuit board)
A)*
OFF
8 ERREUR ON / PLS Type of output error Impulse output 24V output
* By SW2-4 to «ON» position, you can synchronize the motor B with A.
ON
SW1-7
ON
SW2-4
HBK-608FP-EU2 Technical documentation
18 Original notice - T1.8Dip-switches SW2 - Selection and configuration of functions
ON
SW1-7 1 zone
SW1-7
OFF
SW1-7 2 zones
ON
SW2
SW5 1 2 3 4
ON
On mode ZPA SW5≠0 / 2 motors on circuit board SW1-7
Dip switches Initial
Function ON OFF
SW2 setting
Synchronization
State of sensor ON
(Allows start and stop of
1 SEN / SYN A Synchronization / State sensor zone A (allows to recover the state
severelal motorized rollers in
of sensor)
the same zone)
Synchronization
State of sensor ON
(Allows start and stop of
2 SEN / SYN B Synchronization / State sensor zone B (allows to recover the state
severelal motorized rollers in
of sensor)
the same zone)
ON
3 STOP / RUN A Start / Stop forced motor A Forced start motor A Forced stop motor A
ON
4 STOP / RUN B Start / Stop forced motor B Forced start motor B Forced stop motor B
OFF
On mode ZPA SW5≠0 / 1 motor on circuit board SW1-7
Dip switches Initial
Function ON OFF
SW2 setting
Synchronization
State of sensor ON
(Allows start and stop of
1 SEN / SYN A Synchronization / State sensor zone A (allows to recover the state
severelal motorized rollers in
of sensor)
the same zone)
Synchronization
State of sensor ON
(Allows start and stop of
2 SEN / SYN B Synchronization / State sensor zone B (allows to recover the state
severelal motorized rollers in
of sensor)
the same zone)
ON
3 STOP / RUN A Start / Stop forced motor A Forced start motor A Forced stop motor A
Synchronization mode to
zone A ON
4 STOP / RUN B Start / Stop forced motor B (Selection change Not use
considered only after a
restart of the circuit board)
HBK-608FP-EU2 Technical documentation
19 Original notice - T1.8ON
On mode «Forced control» SW5=0 / 2 motors on circuit board SW1-7
Dip switches Initial
Function ON OFF
SW2 setting
Synchronization
State of sensor ON
(Allows start and stop of
1 SEN / SYN A Synchronization / State sensor zone A (allows to recover the state
severelal motorized rollers in
of sensor)
the same zone)
Synchronization
State of sensor ON
(Allows start and stop of
2 SEN / SYN B Synchronization / State sensor zone B (allows to recover the state
severelal motorized rollers in
of sensor)
the same zone)
ON
3 STOP / RUN A Start / Stop forced motor A Start motor A with terminal CN4-2
ON
4 STOP / RUN B Start / Stop forced motor B Start motor B with terminal CN4-3
OFF
On mode «Forced control» SW5=0 / 1 motor on circuit board SW1-7
Dip switches Initial
Function ON OFF
SW2 setting
Synchronization
State of sensor ON
(Allows start and stop of
1 SEN / SYN A Synchronization / State sensor zone A (allows to recover the state
severelal motorized rollers in
of sensor)
the same zone)
Synchronization
State of sensor ON
(Allows start and stop of
2 SEN / SYN B Synchronization / State sensor zone B (allows to recover the state
severelal motorized rollers in
of sensor)
the same zone)
ON
3 STOP / RUN A Start / Stop forced motor A Start motor A with terminal CN4-2
Synchronization mode to
zone A ON
4 STOP / RUN B Start / Stop forced motor B (Selection change Not use
considered only after a
restart of the circuit board)
HBK-608FP-EU2 Technical documentation
20 Original notice - T1.8Rotary switches SW3 and SW4
Rotary switches SW3 and SW4 allows to adjust individually the motorized roller speed connected to port A and B.
SW3 : Motorized roller connected to port A SW3 SW4
SW4 : Motorized roller connected to port B
Position of rotary switch Speed (m/min) Speed (m/min) Speed (m/min)
(SW3 / SW4) for a code 15 to ± 1% for a code 28 to ± 1% for a code 55 to ± 1%
9 17.2 34.9 65.3
8 15.8 32.0 59.9
7 14.3 29.1 54.3
6 12.9 26.2 49.0
5 11.5 23.3 43.5
4 10.0 20.4 38.1
3 8.6 17.5 32.6
2 7.2 14.6 27.2
1 5.7 11.6 21.8
0 4.3 8.7 16.3
Rotary switch SW5
Rotary switch SW5 allows to adjust temporization of :
- Sensor timer
- Run holding timer
- Initialization
- Jam timer
SW5
It is set to 1 in the initial position (mini timer)
Sensor timer / Run holding timer /
Position of rotary switch (SW5) Jam timer (s)
initialization (s)
9 18 36
8 16 32
7 14 28
6 12 24
5 10 20
4 8 16
3 6 12
2 4 8
1 2 4
0 External control (PLC)
Position 0 is reserved for external control (PLC, for example)
HBK-608FP-EU2 Technical documentation
21 Original notice - T1.8Forced control
Dip-switch SW5 allows to select «ZPA» mode or «Forced control» mode by by superior order, like PLC for example.
Position of rotary switch (SW5) Mode
1~9 ZPA
0 Forced control
In case of «Forced control», communication between circuit boards is interrupted.
The orders «Start» and «Stop» are given by the CN4-2 and CN4-3 terminals and reset the error signal must be
done individually (see «Error signal output» - page 16).
ON
SW1
CN4 CN4 1 2 3 4 5 6 7 8
12 3 45 6
12 3 45 6
Motor A
Motor B Reset signal
The function «Forced control» will be suspended during the presence of the error on the motor.
HBK-608FP-EU2 Technical documentation
22 Original notice - T1.85. Timers
Run Holding Timer
OFF OFF
This is the start-up motorized roller
timer of zone «N-1» relative to the
S S S
state «OFF» of the cell of the zone
«N-1».
It allows motorized roller of zone «N- Zone N+1 Zone N Zone N-1
1» to operate during the time it takes The time of timer depend of settings of SW5
to evacuate the load on zone «N-1». (see page 22).
Sensor Timer
OFF OFF
This is the start-up motorized roller ti-
mer of zone «N» relative to the state S S S
«OFF» of the cell of the zone «N-1».
It allows motorized roller of zone «N»
to operate during the time it takes to re- Zone N+1 Zone N Zone N-1
ceipt load to the cell of the zone
«N».
Jam Timer
Detection jam / blocking loads
When a load is on the zone (state sensor is ON) and the next zone is free, the circuit board will start-up the
motorized roller. If the sensor state doesn’t change (stay ON) for a defined period (Time depending on speed
code) so it means there is a Jam : motorized roller stop and an error signal is sent.
In combination with «Sensor timer» and «Run holding timer», it allows
HBK-608FP to detect the jam / blocking at the sensor or between the
sensors.
S2 S1
OFF Start ON Start
Jam / blocking Jam / blocking
between the sensors at the sensor
S2 S1 S2 S1
OFF OFF OFF ON
Start Start
S2 S1 S2 S1
OFF ON OFF ON
Motor stop + sending signal Motor stop + sending signal
after timer after timer
HBK-608FP-EU2 Technical documentation
23 Original notice - T1.8Initialization
On ZPA mode (SW5≠0), when powering, or after unblocking emergency stop, loads which are located between
the areas of sensors are conveyed at the minimum speed until the next zone.
Loads which are in front of sensor don’t move.
Stop
Stop
When the initialization phase is complete, circuit board management zones activates.
The initialization period is the adjustment of the rotary switch SW5.
The initialization will not be performed if the circuit board is set to the «Forced control» mode SW5 = 0.
HBK-608FP-EU2 Technical documentation
24 Original notice - T1.86. Functions and settings
Transfer modes
ON
SW1
ON Load transfer train mode (ZP2)
1 2 3 4 5 6 7 8 OFF
Load transfer singulated mode (ZP1)
A - Load transfer singulated mode (ZP1)
This transfer mode allows to move load step by step : when the downstream
zone sensor detects that it’s free, it send signal which active upstream zone
to move load one by one, zone by zone.
B - Load transfer train mode (ZP2)
This transfer mode allows to move load together : when the downstream
zone sensor detects that it’s free, it send signal which active together all the
upstream zones to move load together.
C - Short and long load transfer
It allows conveying loads which are longer than one zone. Indeed, thanks
to a patented managment system call «Flexible management», if the load
take several zones by its length, these zones are recognized like one zone.
It allow a continuous conveyor of differents length of load without change
length zone. Flexible zone management is possible when all the zones
operate in train mode.
D - Spacing load / Discard management
Thanks to the two transfer modes explained above, we can manage
discards between load in order to ensure proper distance. Indeed, if the
conveyor is in train mode, configuring just one zone in singulated mode,
upstream load wait that the load which is in the «singulated mode zone»
(ZP1) leave this zone.
This function is not compatible with «flexible zone management» and it
does not allow to separate loads which are touching eachothers.
Train mode Mode Train
zone per mode
zone In the case of HBK-608, there may be 1 or 2 zones on mode
«singulated load» (ZP1) based on SW1-7 setting.
HBK-608FP-EU2 Technical documentation
25 Original notice - T1.8Synchronization
(downstream) (upstream)
Depending on the length of the conveyor, the weight
and dimensions of the load to be transported, it is pos-
sible to place 2 motorized rollers in a zone.
In this case, a synchronized start mode is provided for
simultaneously controlling the motorized rollers on the
same HBK-608 circuit board.
For this, you must set the dip-switches SW1-7 and
SW2-4 to «ON» position.
ZONE N+1Direction of flow ZONE N Motor B will start and stop simultaneously Motor A.
(downstream) (upstream) In ZPA mode, Only connect the sensor CN301.
ON
STOP SW1
1 2 3 4 5 6 7 8
ON
SW2
Communication 1 2 3 4
cable
When «Motor A» arrested by mistake, «Motor B» will
be stopped but, although «Motor B» stopped, «Motor
A» will not be affected by this stop.
Changing selection considered only after a power-
on reset the circuit board.
Odd number of motorized rollers
Direction of flow
(downstream) (upstream) (downstream)
In case of one motorized roller to connect on HBK-608, it
should be connected to the Motor A and set the dip-switch
SW1-7 to «ON» position.
ZONE N+1 ZO
SW1
ON
1 2 3 4 5 6 7 8
It’s possible to select either «Singulated load mode» either «Train Mode» using SW1-4.
HBK-608FP-EU2 Technical documentation
26 Original notice - T1.8Function «Forced stop»
It is possible to force the shutdown of one or more zones (motors) in ZPA mode or Forced Mode by sending a
signal on the terminal CN4-2 for Motor A and CN4-3 for Motor B with the following parameters :
SW2-3 for Motor A
SW2-4 for Motor B
CN4
12 3 45 6
Motor B
Motor A
SW5
Forced stop in ZPA mode
STOP
A’ B’ A B
HBK-608 HBK-608
CN4-2
ON ON
SW1-7
ON OFF
SW2-3 (Motor A)
ON ON
SW2-4 (Motor B)
9 0 1 9 0 1
SW5 ≠0 ≠0
7 8
7 8
2 3 4
2 3 4
6 5 6 5
This function allows :
- inserting a load by creating void zones downstream of the stopped zone
- generate spaces between the loads
STOP
A’ B’ A B
The Motor A will be immobilized during the reception of the signal.
HBK-608FP-EU2 Technical documentation
27 Original notice - T1.8Function «Forced start»
It is possible to force the start of one or more zones (motors) by sending a signal on the terminal CN4-2 for Motor
A and CN4-3 for Motor B with the following parameters :
SW2-3 for Motor A
SW2-4 for Motor B
CN4
12 3 45 6
Motor B
Motor A
SW5
First zone control (loading zone) in ZPA mode
B’ A B
HBK-608 HBK-608
Direction of flow
CN4-3 CN4-6
ON ON
SW1-7
Motor B
Motor A
Motor A
Motor B
OFF
SW2-2
OFF
SW2-3 (Motor A)
OFF ON
SW2-4 (Motor B)
9 0 1 9 0 1
SW5 ≠0 ≠0
7 8
7 8
2 3 4
2 3 4
6 5 6 5
Direction of flow
A B Upstream En ava
Load zone
Motor B
Motor A
Output
sensor
Start / Stop
State sensor B
HBK-608FP-EU2 Technical documentation
28 Original notice - T1.8Last zone control (unloading zone), in mode ZPA
CN302
Direction of flow
(downstream) (upstream)
STOP
12 3 45 6
12 3 45 6
Communication
cable
The zone is considered the last zone if the cable communication is not connected to the CN302.
The motorized roller stops as soon as the sensor of the zone is activated.
To evacuate the last zone, we must give the order to forced start to the circuit board of the last zone.
The motor stops after the time set by SW5 «Run holding timer» from the state change (ON → OFF) of the sensor
in the zone A.
Sens de flux
Direction of flow
(downstream) (upstream)
A B A’
HBK-608 HBK-608
f flow
CN4-2 CN4-5
ON ON
Motor B
SW1-7
Motor A
OFF
SW2-1
ON OFF
SW2-3 (Motor A)
OFF
SW2-4 (Motor B)
9 0 1 9 0 1
SW5 ≠0 ≠0
7 8
2 3 4
7 8
2 3 4
6 5
w Direction of flow
6 5
Upstream En aval A B
Unloading zone
Motor B
Motor A
Output
sensor
Output
sensor
HBK-608FP-EU2 Technical documentation Start
29 Original notice - T1.8Setting logic flow direction relative to load move direction
Before proceeding to other settings, it is imperative to first set the flow direction.
Direction of loads move = Direction of circuit board logic flow
Logic flow by circuit board HBK-608 is determinate for a load transfer right to left relative to the circuit board in
front view.
Direction of loads move
STOP
A’ B’ A B
Direction of logic flow
Direction of loads move ≠ Direction of circuit board logic flow
If transfer load direction requested is opposite to flow logic direction, it’s possible to inverse it by setting dip-
switch SW1-1 on «OFF» position.
You must disconnect the cable communication of the last zone and eventually reposition the sensors so
that they are at the end of each zone.
STOP
A’ B’ A B
Direction of logic flow
To reverse the direction logic flow, select the position of SW1-1 and send the signal to CN4-1.
OFF SW1-1 CN4-1 Flow direction
SW1-1
OFF ON
CN4
OFF
12 3 45 6
HBK-608FP-EU2 Technical documentation
30 Original notice - T1.8Settings motorized rollers rotation direction relative to logic flow direction
Direction of motorized roller rotation depend on locations of cirecuit boards (HBK-608) and of the motorized
rollers on the conveyor.
This setting is made using the Dip-switch SW1-5 and SW1-6.
SW1
ON
1 2 3 4 5 6 7
CN4
12 3 45 6
• Straight line - Circuit board and motor are on the same side
Direction of flow
HBK-608 HBK-608
SW1-5 Direction of logic
SW1-1 CN4-1 PM605KT
SW1-6 flow
ON
CW
ON
OFF
CCW
OFF
ON
CCW
OFF
OFF
CW
Front view of the circuit board HBK-608
HBK-608FP-EU2 Technical documentation
31 Original notice - T1.8• Straight line - Circuit board opposite to the motorized roller
HBK-608 HBK-608
SW1-5 Direction of logic
SW1-1 CN4-1 PM605KT
SW1-6 flow
ON
CCW
ON
OFF
CW
OFF
ON
CW
OFF
OFF
CCW
Front view of the circuit board HBK-608
For this configuration, it is necessary to use an extension motor cable.
Cable extension length Reference
1,2m ACE-CBM-G1200
2,7m ACE-CBM-G2700
HBK-608FP-EU2 Technical documentation
32 Original notice - T1.8Speed setting
To adapt to the speed of conveyor which are upstream or downstream, to the cadence of the machine, the HBK-
608 circuit board have a function of individual internal speed variation with integrated
potentiometer SW3 for Motor A and SW4 for Motor B.
Example pour Serie PM605KT
Speed code 15
Nominal SW3/SW4
17,2 9
15,8 8
14,3 7
12,9 6
11,5 5
10,0 4
8,6 3
SW4 for Motor B
7,2 2
SW3 for Motor A 5,7 1
4,3 0
A B A B
HBK-608 HBK-608
9 0 1 9 0 1
7 8
7 8
2 3 4
2 3 4
SW3 6 5 6 5
9 0 1 9 0 1
7 8
7 8
2 3 4
2 3 4
SW4 6 5 6 5
Max
Speed
0
HBK-608FP-EU2 Technical documentation
33 Original notice - T1.8Example of setting of SW and I/O signals
Direction of flow
Zone N-2 Zone N-1 Zone N
A B A’ B’
CN4-4 CN4-1 CN4-1
A B A’ B’
ON OFF
1. Reset error / direction of flow → (RST) (DIR)
ON
2. Manual reset after a thermal fault
ON
3. Logic of output signals PNP
OFF
4. Mode ZPA singulated load
SW1
ON ON
5. Direction of rotation Motor A, A’
ON OFF
6. Direction of rotation Motor B, B’
OFF ON
7. Nomber of zones (2 zones) (1 zone)
OFF
8. Error output 24V
1.
2. N/A (Let the initial position)
SW2
3.
ON
4.
9 0 1 9 0 1
SW3 Speed of Motor A, A’ (9) (9) *1
7 8
7 8
2 3 4
2 3 4
6 5 6 5
9 0 1 9 0 1
SW4 Speed of Motor B, B’ (9) (9) *1
7 8
7 8
2 3 4
2 3 4
6 5 6 5
9 0 1
SW5 Timer (5) *2
7 8
2 3 4
6 5
1. Reset / Direction of transfer ON/OFF ON (DIR)
2.
N/A
3.
CN4
4. Sending of the error signal CN4-4 → N/A
5.
N/A
6.
*1 : SW3 = SW4 *2 : SW5 ≠ 0
HBK-608FP-EU2 Technical documentation
34 Original notice - T1.8Appendix 1
Incorporation declaration
in accordance with the EC Machinery Directive 2006/42/EC, Annex II B
The manufacturer :
ITOH DENKI CO., Ltd
1146-2 Asazuma-Cho, Kasai, Hyogo 679-0105 Japan
Distributed in Europe by :
ITOH DENKI Europe SAS
490 avenue des Jourdies - PAE les Jourdies - BP 323
74807 St Pierre en Faucigny Cedex - France
hereby declares that the product series:
Circuit board HBK-608FP-EU2
is an incomplete machine as defined in the EC Machinery Directive and therefore does not fully meet
the requirements of this Directive. Service entry is prohibited until the whole machine/system in which
it is incorporated is declared to be in compliance with the EC Machinery Directive.
The health and safety requirements of Annex I have been applied. The special technical documents in
accordance with Annex VII have been drawn up (and, if appropriate, submitted to the competent authorities).
Person authorized to compile the technical documentation :
ITOH DENKI CO., Ltd
Toshiyuki TACHIBANA
1146-2 Asazuma-Cho, Kasai, Hyogo 679-0105 Japan
ITOH DENKI EUROPE SAS
Masayuki SHIMODA
490 Avenue des Jourdies, 74800 St Pierre en Faucigny - France
EC Directives applied :
• Machinery Directive 2006/42/EC
• European EMC Directive 2014/30/EC
• European RoHS Directive 2011/65/EU
ITOH DENKI EUROPE SAS, undertakes to forward, following a duly motivated request from the national
authorities, the relevant information concerning the quasi-machine.
Saint Pierre en Faucigny, 19 July 2021
T. AKASHI, General Director
HBK-608FP-EU2 Technical documentation
35 Original notice - T1.8Technology for tomorrow
ITOH DENKI
490 Av. des Jourdies - P.A.E. les Jourdies
74800 St Pierre en Faucigny - France
Phone : +33 (0)4 50 03 09 99 Fax : +33 (0)4 50 03 07 60
www.itoh-denki.comYou can also read