Pixel-Wise Crack Detection Using Deep Local Pattern Predictor for Robot Application - MDPI
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
sensors
Article
Pixel-Wise Crack Detection Using Deep Local Pattern
Predictor for Robot Application
Yundong Li 1 , Hongguang Li 2, * and Hongren Wang 3
1 School of Electronic and Information Engineering, North China University of Technology,
Beijing 100144, China; liyundong@ncut.edu.cn
2 Unmanned Systems Research Institute, Beihang University, Beijing 100191, China
3 School of Electronic and Information Engineering, Beihang University, Beijing 100191, China;
wanghongren616@hotmail.com
* Correspondence: lihongguang@buaa.edu.cn
Received: 14 July 2018; Accepted: 7 September 2018; Published: 11 September 2018
Abstract: Robotic vision-based crack detection in concrete bridges is an essential task to preserve
these assets and their safety. The conventional human visual inspection method is time consuming
and cost inefficient. In this paper, we propose a robust algorithm to detect cracks in a pixel-wise
manner from real concrete surface images. In practice, crack detection remains challenging in the
following aspects: (1) detection performance is disturbed by noises and clutters of environment;
and (2) the requirement of high pixel-wise accuracy is difficult to obtain. To address these limitations,
three steps are considered in the proposed scheme. First, a local pattern predictor (LPP) is constructed
using convolutional neural networks (CNN), which can extract discriminative features of images.
Second, each pixel is efficiently classified into crack categories or non-crack categories by LPP,
using as context a patch centered on the pixel. Lastly, the output of CNN—i.e., confidence
map—is post-processed to obtain the crack areas. We evaluate the proposed algorithm on samples
captured from several concrete bridges. The experimental results demonstrate the good performance
of the proposed method.
Keywords: local pattern predictor; crack detection; bridge inspection; convolutional neural networks;
robotic vision
1. Introduction
In robot applications, bridge inspection is extremely necessary to set up strategies of bridge
repair and rehabilitation, especially when maintenance resources are limited. Cracks are the most
important representations of the health condition of concrete structures. It is reported that more than
100,000 bridges suffer from cracking in the United States [1]. Therefore, the evaluation of cracking
plays a vital role in bridge inspection. The traditional crack detection relies on human visual inspection,
which is time-consuming and labor intensive when examining a large span bridge. To address these
limitations, computer-vision based method is promising to enhance human visual inspection or to be
combined with mechanical and aerospace structures, such as aerial robots [2], to conduct a robotic
crack inspection for crack detection.
Conventional computer-vision based methods for crack detection proceed in a two-phase fashion:
feature extraction and feature classification. The key issue lies in the process of designing distinguishing
features. Basically, feature design principles may be divided into two groups: handcrafted methods
and learned methods. In the past decades, the handcrafted features, such as histograms of oriented
gradients (HOG) [3] and scale-invariant feature transform (SIFT) [4], had made great achievements
in face recognition, pedestrian detection, vision inspection, and so on. However, these are very
Sensors 2018, 18, 3042; doi:10.3390/s18093042 www.mdpi.com/journal/sensorsSensors 2018, 18, 3042 2 of 13
rudimentary methods in the form of visual inspection which have several disadvantages, including
limited accuracy and narrow vision field of the whole bridge deck. Additionally, it is a dangerous
task for humans to conduct visual crack inspection, especially with passing traffic [5]. As a result,
a robotic system where robots are incorporated with visual detection methods to implement crack
assessment has large development prospects. Despite being widely used, the existing robotic systems
still employ manual approaches mentioned above for feature analysis, which leaves the problem of
low accuracy unsolved. Recently, it has been demonstrated that the hierarchical features extracted
with deep learning can outperform handcrafted features in most cases [6]. Crack detection based on
deep learning becomes a novel and potential approach to research.
2. Related Works
Robotic systems incorporated with visual techniques to solve problems is no longer a new topic
in the field of computer vision, including visual perception, object recognition, detection, and tracking.
A human-robot interactive framework was proposed to endow robots with the ability to localize
a person by processing visual and audio data [7], so that people can be directed attention to whom they
were interacting. Robotic application is also extensively developed in 3D visual problems. Amatya et al.
developed a method of locating shaking positions based on objects pixel locations in the images [8].
An enhanced CHT [9] is employed for estimating the trajectory of a spherical target in three dimensions
to improve tracking accuracy. For robotic navigation in unstructured environments, a method based
on ToF cameras [10] was provided for 3D obstacle detection and classification. Meanwhile, in the
area of industrial and daily application [11], the robot mechanism presents a promising prospect.
A real-time collision detection algorithm for marine robotic manipulation was presented to be a useful
pilot assisting tool for subsea intervention operations [12]. In addition, Leite et al. proposed a new
skill-based architecture for MR which is used to overcome the difficulties in current autonomous robot
design [13] to improve robotic performance.
Many crack detection algorithms have been developed before now. Koch et al. summarized the
computer-vision based methods, and roughly categorized them into pre-processing, feature-based,
model-based, pattern-based, and 3D reconstruction types [14]. Herein, we divide the existing
algorithms into non-learning-based and learning-based from the perspective of feature representation
and classification methods.
Most of the non-learning-based methods employ image processing technologies, such as noise
filtering, edge detection, binary thresholding, and morphological operations [15–19]. Adhikari et al.
proposed a crack detection method by combining histogram enhancement, median filtering,
and thresholding [20]. Images are enhanced and smoothed by histogram equalization and median filter
first, then the candidate cracks are obtained by subtracting smoothed images from original images.
Dinh et al. proposed a histogram thresholding-based method [21]. Moving average filters were
employed to remove noise from images, then images were segmented with threshold determined
using histogram peak and valley information. However, this method can only be used in situations
of high contrast images. Lim et al. presented an automatic inspection system using mobile
robotic equipped with cameras [22]. A Laplacian of Gaussian (LoG) algorithm was utilized in their
scheme. Yamaguchi et al. proposed a crack detection method based on percolation image processing
technique [23]. In 2014, Nguyen et al. proposed a two-stage detection method [24]. Images were
enhanced by phase symmetry-based filters first, then binary images were obtained using thresholding
and morphological operations. In the second stage, the center line of a crack was fitted by cubic
splines and crack edges were determined by pixel intensity perpendicular to the splines. Kapela et al.
2015 proposed a HOG based crack detection scheme which was used for pavement inspection [25].
Although there are many studies, the bulk of non-learning-based approaches use only low-level image
processing techniques, which easily fail to separate cracks from complicated backgrounds because
they are noise sensitive, and the surface images always suffer from dirt, shadows, and other factorsSensors 2018, 18, 3042 3 of 13
causing noise [1]. Furthermore, the binary segmentation with a fixed threshold in non-learning-based
methods is lacking flexibility with respect to variations of environments.
Compared with non-learning methods, learning-based approaches learn patterns from surface
images and use patterns instead of pixels to predict cracks, which can alleviate negative effects of noise.
The potentials of machine learning for crack detection—such as support vector machines (SVM) [26],
neural networks [27], and principal component analysis (PCA)—were explored by researchers [28].
Lattanzi et al. presented a crack detection method using Candy operator and K-means clustering
algorithm [29]. In 2015, Bu et al. proposed an automatic crack detection scheme [30] where wavelet
features were firstly extracted using a sliding window texture analysis technique, then features
were classified by SVM. Prasanna et al. presented an automatic crack detection algorithm, called
spatially tuned robust multifeature (STRUM) classifier [1]. In their scheme, images were tiled as
patches, and cracks of each patch were approximated by curve fitting using random sample consensus
(RANSAC) algorithm. To eliminate parameter adjustment, several popular classifiers—such as SVM,
AdaBoost, and random forest—were used to remove false fitting results. In 2017, Chaudhury et al.
proposed a spatial-temporal non-linear filtering method combined with conditional random fields
(CRF) [31]. Experimental results showed that their method can obtain high accuracy. Li et al. 2017
developed a region-based active contour model combined with Canny operator for concrete crack
segmentation, and SVM was used to eliminate noises [32]. Sparse autoencoder (SAE) and tensor voting
were introduced in a pavement crack inspection by Qian et al. [33]. Features of potential patches
were extracted by SAE, and then classified by a softmax classifier. In 2016, Schmugge et al. proposed
a deep neural network-based method which was used in crack detection for nuclear power plant [34].
Both training and testing images were divided into patches of 224 × 224 pixels, and a GoogleNet
was used to classify each patch into crack or non-crack objects. Both methods in [33,34] can only get
rougher detection results because it was block-wise and could not locate cracks on a pixel level.
As discussed above, on the basis of the existing research, crack detection algorithms still face two
challenges: strong adaptability to noisy environment and pixel-wise high accuracy requirement.
3. Work in This Paper
In this study, a completely different solution for crack detection is explored. The idea was
motivated by the fact that adjacent pixels are highly spatially correlated. Whether a pixel belongs to
a crack depends upon its surroundings. Basically, pixels of cracks are located on regular geometrical
lines, while pixels of noise are not. Therefore, this distribution pattern could facilitate crack
identification. The crucial point is how to capture this distribution pattern. In our scheme, CNN is
employed to extract abstract representation of pixels’ pattern, then each pixel is classified into crack or
non-crack using the patterns as inputs of CNN classifier. Experiments show that patterns extracted by
CNN are robust enough to noise and variation of environments.
This research has three main contributions. (1) We provide a local pattern predictor (LPP)
which reveals an underlying mapping function existed between a pixel probability to belong to
cracks and its context. (2) A CNN is designed to learn this mapping function of LPP in our scheme,
which is used to predict the probability of each pixel according to its context. To the authors’ best
knowledge, this represents a first attempt to use deep learning to forge an LPP and detect cracks
in a pixel-wise way. (3) A typical database, including concrete crack images, is collected and open
to fill the blank of the database in the area of crack detection. The image samples are available at
https://github.com/VivianWang0616/CrackDetectDLPP/tree/master.
4. Proposed Method
4.1. Scheme of Proposed Method
In this paper, we propose a pixel-wise based method leveraging patterns of each pixel. In other
word, each pixel’s probability belongs to cracks is predicted using a local pattern predictor accordingSensors 2018, 18, 3042 4 of 13
to its pattern. The local pattern predictor is constructed based on CNN. It can divide each pixel into
crackSensors 2018, 18, x FOR
or non-crack, PEERas
using REVIEW
context a patch centered that pixel. 4 of 13
The overall diagram of the method is shown in Figure 1. In the scheme, a seven-layer CNN is
The overall diagram of the method is shown in Figure 1. In the scheme, a seven-layer CNN is
customized to facilitate the crack classification task. It is trained by a training dataset collected from
customized to facilitate the crack classification task. It is trained by a training dataset collected from
different bridges.
different bridges.Subsequently,
Subsequently,thethewell-trained CNNisisused
well-trained CNN usedasas a basis
a basis to construct
to construct a local
a local pattern
pattern
predictor. An 18
predictor. An× 1818 patch
× 18 patchcentering
centeringeach
each pixel tiledfrom
pixel tiled fromconcrete
concrete surface
surface images
images is into
is fed fed local
into local
pattern predictor.
pattern predictor. Thus, the
Thus, theconfidence
confidence map
map of of the
thetest
testimage
image is is obtained
obtained fromfrom the output
the output of LPP.of LPP.
Finally, the confidence map is post-processed to locate crack areas.
Finally, the confidence map is post-processed to locate crack areas.
Figure1.1.Overview
Figure of the
Overview of theproposed
proposedalgorithm.
algorithm.
4.2. Local Pattern
4.2. Local Predictor
Pattern Predictor
As mentioned
As mentioned before,
before,learning-based methods
learning-based methods always
always divide
divide test images
test images into
into small small and
patches, patches,
features extracted
and features extractedfromfromthethepatches
patches areare
compared
compared with those
with of reference
those images
of reference to identify
images the the
to identify
patches
patches which
which containing
containing cracks.These
cracks. These kinds
kinds ofof methods
methodscan canonly
onlylabel thethe
label blocks contain
blocks cracks,
contain cracks,
but cannot locate the crack pixels accurately. In this paper, we take a different approach,
but cannot locate the crack pixels accurately. In this paper, we take a different approach, by predicting by predicting
the probability of each pixel according to its context, which is called local pattern predictor (LPP).
the probability of each pixel according to its context, which is called local pattern predictor (LPP).
The context of a pixel is defined as a rectangular area centered at this pixel, with the width of w
The context of a pixel is defined as a rectangular area centered at this pixel, with the width of w and
and the height of h. Whether a pixel belongs to a cracked area is related to its context because the
the height
concrete h. Whether
of surface image a pixel
has a belongs
strong 2Dtolocal
a cracked areaSpatially
structure. is related to its context
adjacent pixels arebecause
alwaysthe concrete
highly
surface image has a strong 2D local structure. Spatially adjacent pixels are always highly
correlated. The grayscale values of pixels in the centering rectangle are arranged to construct a local correlated.
The grayscale values of pixels in the centering rectangle are arranged to construct a local pattern. Let qi
pattern. Let q i be the vector of the local pattern of the central i-th pixel, and p i be the probability
be the vector of the local
of the central i-th pixel pattern of thetocentral
to belong i-th pixel,
a cracked and pthe
area, then i bemapping
the probability
betweenofand thecan be i-th
central
pixelexpressed
to belongasto a cracked area, then the mapping between and can be expressed as
f (q ) = p (1)
f (qi i) = pii (1)
The key point is to find a non-linear mapping to approximate the relationship presented by
The key (1).
Equation point is to
In this findCNN
paper, a non-linear
is trained mapping
to learn thistomapping
approximate the relationship
from a large set of samples.presented
Studies by
have (1).
Equation shown that paper,
In this the response
CNNof is the human
trained to brain
learn cortex to external
this mapping visual
from stimulus
a large is samples.
set of layered. The
Studies
cortex responds to line information, such as the edges of objects, and
have shown that the response of the human brain cortex to external visual stimulus is layered. then perceives shape
information
The cortex and thetoobjects
responds themselves. Feature
line information, such representation
as the edgesofofa CNN is abstracted
objects, and thenlayer by layer,shape
perceives
which conforms to the learning process of human brain. It also has a capability of shift, scale, and
information and the objects themselves. Feature representation of a CNN is abstracted layer by
distortion invariance. These merits make CNN well-suited to be a basis of local pattern predictor and
layer, which conforms to the learning process of human brain. It also has a capability of shift,
to deal with degraded image quality affected by noise, variation of illumination, angles, and positions
scale,ofand distortion invariance. These merits make CNN well-suited to be a basis of local pattern
cameras.
predictor and to deal with degraded image quality affected by noise, variation of illumination, angles,
and positions of cameras.
4.3. Convolutional Neural Networks for LPP
Since Hinton [35,36] proposed a greedy layer-wise pre-training algorithm to initialize the
4.3. Convolutional Neural Networks for LPP
weights of deep architectures, artificial neural networks have been revived. Deep neural networks
Sincebecome
have Hinton a[35,36] proposed
new popular a greedy
topic layer-wise
and advanced pre-training
in image algorithm
classification, objecttotracking
initialize[37]
theand
weights
of deep architectures, artificial neural networks have been revived. Deep neural networks have becomeSensors 2018, 18, 3042 5 of 13
a new popular topic and advanced in image classification, object tracking [37] and recognition [38],
Sensors 2018, 18, x FOR PEER REVIEW 5 of 13
gesture recognition [39], action recognition [40], defect inspection [41–44], voice recognition, natural
language understanding,
recognition [38], gestureetc. Popular[39],
recognition deep learning
action frameworks
recognition include
[40], defect stacked
inspection autoencoders,
[41–44], voice
convolutional
recognition, neural
natural networks, and restricted etc.
language understanding, Boltzmann
Popular deepmachine.
learning frameworks include stacked
autoencoders,
In the proposed convolutional
method, aneural networks,
seven-layer CNNandbased
restricted Boltzmann
on the LeNet-5machine.
[45] was designed (Figure 2).
In the proposed method, a seven-layer CNN based on the
The input is an 18 × 18 image, which is corresponding to the size of a patch LeNet-5 [45] was designed (Figure
centering each2).pixel.
The input is an 18 × 18 image, which is corresponding to the size of a patch centering
Layer C1 is a convolutional layer with six feature maps. Each point of C1 feature maps is connected each pixel. Layer
C1 is a convolutional layer with six feature maps. Each point of C1 feature maps is connected to a
to a 3 × 3 neighborhood in the input image by a 3 × 3 convolutional filter. Consequently, the size of
3 × 3 neighborhood in the input image by a 3 × 3 convolutional filter. Consequently, the size of each
each map of layer C1 is 16 × 16. There are totally 60 trainable parameters and 15,360 connections in
map of layer C1 is 16 × 16. There are totally 60 trainable parameters and 15,360 connections in
layerlayer
C1. C1.
..
.
Figure 2. Architecture of CNN used in the proposed method.
Figure 2. Architecture of CNN used in the proposed method.
Layer S1 is a sub-sampling layer with six feature maps. The size of each map of layer S1 is 8 × 8
because eachLayerunit S1 isin
a sub-sampling
S1 is correspondinglayer with tosix
a 2feature maps. The size in
× 2 neighborhood of each
layermapC1 of layeraS1
using is 8 × 8
max-pooling
because each unit in S1 is corresponding to a 2 × 2 neighborhood in layer C1 using a max-pooling
technique. The meaning of max-pooling is to choose a maximum within the 2 × 2 neighborhood.
technique. The meaning of max-pooling is to choose a maximum within the 2 × 2 neighborhood. Layer
Layer C2 is a convolutional layer with 12 feature maps. Each unit of C2 feature maps is connected
C2 is a convolutional layer with 12 feature maps. Each unit of C2 feature maps is connected to a 3 × 3
× 3 neighborhood
to a 3neighborhood in the
in the layer S1 layer
by a 3S1× 3by a 3 × 3 convolutional
convolutional filter. The size filter. Themap
of each sizeofof each
layer C2mapis 6 ×of6.layer
6 × 6.are
C2 isThere There are totally 120 trainable parameters and 25,920 connections
totally 120 trainable parameters and 25,920 connections in layer C2. Layer S2 is also in layer C2. Layer
a S2
is also a sub-sampling
sub-sampling layer12with
layer with 12 feature
feature maps. The maps. The
size of size
each map of of
each
layermap of3layer
S2 is × 3unit
S2 is 3each
× 3 because because
each in
unit
S2 in S2 is corresponding
is corresponding to a 2 × to a 2 × 2 neighborhood
2 neighborhood in layer C2 in layer
using C2 using a max-pooling
a max-pooling technique. Layer technique.
C3
LayerisC3stillisastill
convolutional layer with
a convolutional layer54 feature
with 54maps.featureSince the size
maps. of each
Since map of
the size in each
layer map
S2 is 3in× layer
3, the S2 is
3 × 3,size
theofsize
feature map ofmap
of feature layerof
C3layer
is 1 ×C31 after
is 1 a×3 1× after
3 convolutional calculation. Layer
a 3 × 3 convolutional C3 can beLayer
calculation. treated C3 can
be treated as a full connection layer with 54 hidden units. The output of layer C3 is a 1 × 54 is
as a full connection layer with 54 hidden units. The output of layer C3 is a 1 × 54 vector, which vector,
called feature vector of the input image extracted by CNN. There are totally 540 trainable parameters
which is called feature vector of the input image extracted by CNN. There are totally 540 trainable
and 6480 connections in layer C3. The last layer is a softmax classifier consisting of two units, which
parameters and 6480 connections in layer C3. The last layer is a softmax classifier consisting of two
divides each feature vector into crack or non-crack categories.
units, which divides
To train each feature
the seven-layer vector
CNN, into crack
a training or non-crack
dataset comprisedcategories.
of 326,000 samples were collected
To
fromtrain45 the seven-layer
images CNN,
of different a training
bridges, whichdataset
includes comprised of 326,000
56,000 positive samplessamples were collected
and 270,000 negative from
45 images
samples. of different
The training bridges, which
parameters areincludes
presented 56,000 positive
in Section 5. samples and 270,000 negative samples.
The training parameters are presented in Section 5.
4.4. Post-Processing
4.4. Post-Processing
Confidence map is generated when a test image is fed into LPP, which contains each pixel’s
probability, indicating
Confidence whether it when
map is generated belongs to crack
a test or non-crack.
image is fed intoSubsequently,
LPP, which post-processing is
contains each pixel’s
conducted
probability, to segment
indicating the confidence
whether map
it belongs to with
cracka or
fixed threshold,Subsequently,
non-crack. and isolated noisy points are
post-processing is
removed to obtain detection results. The binary threshold is simply fixed to 0.5.
conducted to segment the confidence map with a fixed threshold, and isolated noisy points are removed
to obtain detection results. The binary threshold is simply fixed to 0.5.Sensors 2018, 18, 3042 6 of 13
Sensors 2018, 18, x FOR PEER REVIEW 6 of 13
Sensors 2018, 18, x FOR PEER REVIEW 6 of 13
5. Experimental Results
5. Experimental Results
5. Experimental Results
5.1. Data Set
5.1.5.1.
Data Set
Data Set
A data
AA
setset
data
is is
provided using images of real bridge cracksunder
underdifferent
differentimaging
imaging environments
data set isprovided
providedusing usingimages
images of
of real bridge cracks
real bridge cracksunder different imaging environments
environments
and different
and different bridge
bridge surfaces. Some challenging factors exist in the data set, which are illustrated
and different bridgesurfaces.
surfaces.Some
Somechallenging factors exist
challenging factors existininthethedata
dataset,
set,which
whichareare illustrated
illustrated in in
in Figure
Figure 3.3. Figure
Figure3a3ais isa clear
a clear and
and distinct
distinct standard
standard crackcrack
image. image.
In In
FigureFigure
3b, 3b,
cracks cracks
are are and
weak weak
Figure 3. Figure 3a is a clear and distinct standard crack image. In Figure 3b, cracks are weak and
and disorderly.
disorderly. InFigure
disorderly.InInFigure Figure 3c,3c,
3c, background
background
background noisenoise
noise is is strong.
strong.
is strong. In Figure
In Figure
In Figure 3d,the
3d, the3d, the background
background
background is is dirty
dirty isand
and dirty
and blurred.
blurred.
blurred. In
InIn Figure
Figure
Figure3e, 3e,
3e,the the illumination
theillumination
illumination is is dark.
is dark. In
dark. In FigureFigure
Figure 3f,
3f,the3f,
thecrackthe crack
crackisiswide.
wide.is wide.
aa bb cc
d e f
d e f
Figure
Figure 3. Examples
3. Examples of crack
of crack image:(a)
image: (a)clear
clear and
and standard;
standard;(b)
(b)weak
weakand disorderly;
and (c) noise;
disorderly; (d) dirty
(c) noise; (d) dirty
Figure 3. Examples
and blurred; of crack
(e) dark; image: (a) clear and standard; (b) weak and disorderly; (c) noise; (d) dirty
and blurred; (e) dark; (f) (f)
widewide crack.
crack.
and blurred; (e) dark; (f) wide crack.
In ourIn our study,
study, allallthe
the images
images are
aredivided
dividedintointo
two two
parts:parts:
45 images
45 for training
images forand 5 for testing.
training and 5 for
In our
Based on study,
the 45 all the images
training images,are divided
326,000 into are
patches twosampled,
parts: 45which
images
arefor training
used to trainand
a 5 for testing.
seven-layer
testing. Based on the 45 training images, 326,000 patches are sampled, which are used to train
Based
CNN. onAmong
the 45 these
training images,
samples, 326,000
56,000 patches
patches are sampled,
are positive sampleswhich
whichare usedcracks,
contain to train
anda seven-layer
the other
a seven-layer CNN. Among these samples, 56,000 patches are positive samples which contain cracks,
CNN.
270,000 are negative samples chosen from the non-crack background. We will discuss howand
Among these samples, 56,000 patches are positive samples which contain cracks, the other
to sample
and the other 270,000 are negative samples chosen from the non-crack background. We will discuss
270,000
these are negative
patches samples
later in Sectionchosen
6. from the non-crack background. We will discuss how to sample
how to sample
these patchesthese patches
later in Sectionlater
6. in Section 6.
5.2. Metrics
5.2. Metrics
5.2. Metrics
A group of metrics including accuracy, recall and precision were employed to quantify the
A A groupofofaccuracy.
group
classification metrics
metrics including accuracy,
The definition
including accuracy, recalland
of accuracy,
recall and precision
recall, andwere
precision were
precision employed
employed to quantify
are described
to quantify asthe
theclassification
classification accuracy. The definition of accuracy, recall, and precision are described as as
accuracy.
Equations (2)–(4), where trueThe definition
positive (TP), of
true accuracy,
negative recall,
(TN), false and precision
positive (FP), and are
false described
negative
(FN)
Equations are labeled
(2)–(4),
Equations (2)–(4), in Figure
where
where true
true4positive
[38].
positive(TP),
(TP),true
true negative (TN), false
negative (TN), falsepositive
positive(FP),
(FP),and
andfalse
false negative
negative
(FN) areare
(FN) labeled inin
labeled Figure
Figure4 4[38].
accuracy
[38]. = (TP + TN) / (TP + TN + FP + FN) (2)
= (TP
accuracy = + TN)
(recall
TP + / (TP + TN
TN + FP + FN) (3) (2) (2)
accuracy TP)// ((TP
=TN TP ++FN) + FP + FN)
recall
precision
==
recall = TP
TP// (TP
TP(TP
+ FN)
+
/ (TP +
FN )
FP) (4)
(3)
(3)
precision = TP
precision = TP ++ FP
TP// ((TP FP)) (4) (4)
Figure 4. Definitions of TN, FN, TP, and FP.
Figure4.
Figure 4. Definitions
Definitions of
of TN,
TN, FN,
FN,TP,
TP,and
andFP.
FP.Sensors 2018, 18, 3042 7 of 13
5.3. Performance Comparisons
To evaluate the performance of the proposed LPP method, we compared it with two up-to-date
algorithms: STRUM proposed by Prasanna et al. [1] and block-wise CNN method used by
Schmugge [34]. The testing code was implemented under Pytorch (version 0.3.0) and MATLAB
(version R2012b). The testing computer was configured with Intel i7 processor with 3.2 GHz frequency,
64 GB memory and GPU GT730.
The architecture of CNN utilized in this paper is described in Section 3. Herein, the training
parameters are presented as follows: learning rate is set to 0.001, momentum is 0.9, batch size is 100,
and ReLU is used as activate function. We also implemented a CNN using sigmoid activate function.
Experimental results demonstrated that ReLU performances are much better than sigmoid function.
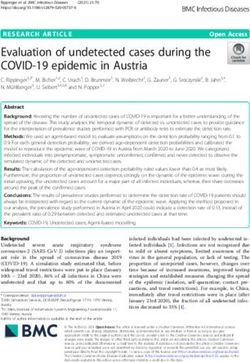
Parts of the experimental results are listed in Figure 5. The first row of Figure 5 is the original
concrete surface images, which were contaminated by noise and clutters. It is difficult to separate
cracks from background using traditional image processing technique in such scenarios. The second
row is the ground truths labeled manually. The third row is the confidence maps predicted by LPP,
and the fourth row is the final detection results of the proposed LPP method after post-processing.
The rows 5 and 6 are the results of STRUM method. Row 5 gives the line fitness results using RANSAC
algorithm. After fitness, patches including lines are classified by SVM, AdaBoost, and random forest
in the literature [1]. The classification results of AdaBoost are only listed here because AdaBoost is
superior to SVM in our experiments. We can see that STRUM method is effective only for the example
of the left column. It is apparent that STRUM method is more suitable for thin cracks, and will fail
when cracks are thick. It will also fail when test image is seriously contaminated, for example, the test
image in the middle column. Conversely, LPP performs well in such scenarios. The last row shows
the detection results of block-wise method using CNN. In the literature, Schmugge et al. [34] used
LeNet architecture with input image of 224 × 224 pixels. Since the 224 × 224 block is too big for crack
detection, we use a smaller block of 18 × 18 pixels instead. The architecture of CNN used in block-wise
method is same as that of LPP method. Obviously, the detection results of block-wise CNN method
are much rougher than the proposed LPP method.
The locating accuracies are listed in Table 1, and the best results are marked in bold. LPP gets the
highest accuracy scores in all testing items. According to the analyses above, the LPP method appears
superior to the STRUM and block-wise CNN methods in locating accuracy.
Table 1. Crack locating accuracy comparison (the best results are marked in bold).
Test Images Method Acc (%) Recall Precision
STRUM+AdaBoost 99.05 24.87 83.19
No. 1 Block-wise CNN 93.87 86.97 14.73
LPP 99.67 84.17 73.38
STRUM+AdaBoost 97.91 13.61 78.42
No. 2 Block-wise CNN 95.48 58.59 27.56
LPP 99.52 78.83 79.86
STRUM+AdaBoost 96.64 14.75 48.03
No. 3 Block-wise CNN 90.88 56.90 15.94
LPP 99.15 83.15 49.20
STRUM+AdaBoost 99.38 3.24 25.00
No. 4 Block-wise CNN 97.17 30.01 6.81
LPP 99.90 74.78 82.89
STRUM+AdaBoost 97.08 8.20 20.13
No. 5 Block-wise CNN 93.67 93.42 26.22
LPP 99.64 89.99 95.17Sensors 2018, 18, 3042 8 of 13
Sensors 2018, 18, x FOR PEER REVIEW 8 of 13
Figure 5. Crack
Figure 5. Cracklocating
locatingresults
resultscomparison.
comparison. RowRow1: Concrete surface
1: Concrete images.
surface Row Row
images. 2: The2:ground-truths
The ground-
labeled
truths labeled manually. Row 3: Confidence maps of LPP method. Row 4: Results of LPP method after
manually. Row 3: Confidence maps of LPP method. Row 4: Results of LPP method after
post-processing.
post-processing.Row
Row5:5:Line fitting
Line results
fitting of STRUM
results of STRUMmethod. RowRow
method. 6: Results of STRUM
6: Results method
of STRUM using
method
AdaBoost classification. Row 7: Results of block-wise CNN method.
using AdaBoost classification. Row 7: Results of block-wise CNN method.
6. Discussion
6. Discussion
6.1. Principle of Training Samples Choosing
6.1. Principle of Training Samples Choosing
Training dataset is crucial to the performance of deep neural networks, especially for vision defect
Training
detection dataset
because thereisare
crucial
many to the backgrounds
more performancethan of deep
defectneural
pixelsnetworks,
in the images.especially
Positivefor vision
samples
defect
are detection
collected from because
all the there
pixelsare
in many more backgrounds
crack areas. However, thethan defectsample
negative pixels in the images.
selecting rule isPositive
much
samples
more are collected
skillful. In the from all the pixels
preliminary in crack training
experiments, areas. However,
dataset the negative sample
is composed selecting
of positive rule
samples
is much more
collected skillful.
from crack andInnegative
the preliminary experiments,
samples selected training
uniformly fromdataset is composed
the background. Theofdetection
positive
samplesusing
results collected
CNNfrom crack
trained by and
suchnegative
trainingsamples selected
dataset are shown uniformly
in Figurefrom the
6b. It is background.
obvious that The the
detection results using CNN trained by such training dataset are shown in
detected cracks are much thicker than the ground truths. The reason is that points near to cracks Figure 6b. It is obvious
thatincorrectly
are the detected cracks are as
categorized much thicker
cracks than
by the thepattern
local groundpredictor.
truths. TheAreason
uniform is that pointsmethod
sampling near to
cracks
with are incorrectly
nearest neighborscategorized
is proposedas to cracks
addressbythistheissue
localinpattern predictor.
this paper, which A uniformin sampling
is shown Figure 7.
method points
Besides with nearest
sampled neighbors
uniformlyisfrom
proposed to address
background, thisnearest
points issue into this paper,
cracks which isasshown
are counted negativein
Figure 7. Besides
samples. points sampled
The detection results are uniformly from background,
greatly improved when using points nearestsampling
uniform to crackswithare counted
nearest
as negativewhich
neighbors, samples. The detection
is shown in Figure results arelocating
6c. The greatly accuracies
improved when using sampling
of different uniform sampling
processeswithare
nearest
listed in neighbors,
Table 2. which is shown in Figure 6c. The locating accuracies of different sampling
processes are listed in Table 2.Sensors 2018, 18, 3042 9 of 13
Sensors 2018,
Sensors 2018, 18,
18, xx FOR
FOR PEER
PEER REVIEW
REVIEW 99 of
of 13
13
(a) (b) (c)
Figure 6.
Figure 6. Crack-locating
Crack-locating results
Crack-locating results compared
results compared
compared of of different
different sampling
sampling processes:
processes: (a)
(a) The
The ground-truths
ground-truths
labeled manually;
labeled manually; (b)
(b) detection
detection result
result of
of uniform
uniform sampling;
sampling; (c)
(c) detection
detection result
result of
of uniform
uniform sampling
sampling
with nearest neighbors.
with nearest neighbors.
Figure 7.
Figure Illustration of
7. Illustration
Illustration of training
training dataset
dataset sampling processes.
sampling processes.
processes.
Figure 7. of training dataset sampling
Table 2. Accuracy of different sampling progress (the best results are marked in bold).
Table 2.
Table 2. Accuracy
Accuracy of
of different
different sampling
sampling progress
progress (the
(the best
best results
results are
are marked
marked in
in bold).
bold).
Test Images Sampling Processes Acc (%) Recall Precision
Test Images Sampling Processes Acc (%) Recall Precision
Uniform 97.83 95.40 34.89
No. 1 Uniform 97.83 95.4084.17 34.8973.38
No. 1 Nearest neighbors 99.67
Nearest neighbors 99.67 84.17 73.38
Uniform 97.58 80.19 48.59
No. 2 Uniform
Nearest neighbors
97.58
99.52
80.1978.83 48.5979.86
No. 2
Nearest neighbors
Uniform
99.52
96.72
78.8385.52 79.8650.40
No. 3 Uniform 96.72 85.5283.15 50.40
No. 3 Nearest neighbors 99.15 49.20
Nearest neighbors
Uniform 99.15
99.17 83.1547.90 49.2034.91
No. 4 Uniform 99.17 47.9074.78 34.91
Nearest neighbors 99.90 82.89
No. 4
Nearest neighbors
Uniform 99.90
96.42 74.7899.93 82.8939.64
No. 5 Uniform 96.42 99.9389.99 39.64
Nearest neighbors 99.64 95.17
No. 5 Nearest neighbors 99.64 89.99 95.17
6.2. Performance Improvement when Dataset Is Limited
6.2. Performance Improvement when Dataset Is Limited
As mentioned before, the numbers of positive and negative samples are imbalanced because most
partsAs mentioned
of concrete before,
surface the numbers
images represent of positive and
backgrounds. negative
This samples
situation are imbalanced
is common because
in visual inspection.
most parts of concrete surface images represent backgrounds. This situation is common in visual
To address the issue, we proposed a Fisher criterion based stacked denoising autoencoder (FCSDA) to
inspection.
enhance feature To address the issue,when
discrimination we proposed a Fisher
only limited criterion
positive basedare
samples stacked denoising
available [38]. Aautoencoder
preliminary
(FCSDA) to enhance feature discrimination when only limited positive samples are available [38]. A
study is conducted to bring the idea into CNN in this paper.
preliminary study is conducted to bring the idea into CNN in this paper.
m J int rara
Suppose samples are divided into L classes, each class has m ii . Samples, i = 1,2,…, L . J int and
JJ int
int er
er are the intra-class and inter-class distance of features, which are defined as (5)
and (6) respectively.Sensors 2018, 18, 3042 10 of 13
Suppose samples are divided into L classes, each class has mi . Samples, i = 1, 2, . . . , L. Jintra and
Jinter are the intra-class and inter-class distance of features, which are defined as (5) and (6) respectively.
1 L mi (i ) 2 1 L mi s (k,nl ) 2
Jintra = ∑ ∑
2 i k =1
k h w,b ( x ) − M k = ∑ ∑ ∑
2 i k =1 j =1
aj − M j (i ) (5)
1 L L 2
Jinter = ∑ ∑
2 i =1 j = i +1
k M (i ) − M ( j ) k (6)
where hw,b ( x ) is the feature vector extracted from input x, nl indicates the output layer of CNN,
a j (k,nl ) = f z j (k,nl ) is the j-th element of the nl layer feature. M(i) is the average feature of the i-th
class, which is defined as
mi
∑ a(k,nl )
k =1
M (i ) = , i = 1, 2 . . . , L (7)
mi
Add Fisher criterion term into a loss function of CNN, and loss function can be rewritten as
1 n 1
2
J
J(w,b) = ∑
n i =1 2
k h w,b x (i )
− y (i )
k + λ intra
Jinter
(8)
where JJintra
inter
is the Fisher criterion in the feature space, λ is a ratio. Minimizing loss function will
shorten the intra-class distance, while increasing the inter-class distance, which makes input patches
easier to classify.
In this experiment, a reduced training dataset sub-sampled from the normal dataset is used to
train CNN. It includes 20,000 positive samples and 140,000 negative samples. All the other parameters
are the same as that in Section 4 except the fisher ratio set to 0.01. The experimental results comparison is
listed in Table 3. Among it, CNN refers to a normal CNN trained by a reduced dataset, and Fisher-based
CNN indicates Fisher criterion is added into the loss function of CNN. We can see that the performance
of Fisher-based CNN is superior to normal CNN from the preliminary experiment. It is a worthy study
direction to exploit the potentiality of Fisher criterion in CNN future applications.
Table 3. Accuracy improved by Fisher criterion (the best results are marked in bold).
Test Images Methods Acc (%) Recall Precision
CNN 99.27 49.74 81.68
No. 1
Fisher-based CNN 99.29 53.83 80.20
CNN 98.34 31.51 91.05
No. 2
Fisher-based CNN 98.40 35.47 88.90
CNN 96.84 5.79 76.92
No. 3
Fisher-based CNN 97.02 12.79 83.33
CNN 99.37 2.88 22.22
No. 4
Fisher-based CNN 99.69 5.74 34.78
CNN 99.01 93.10 72.66
No. 5
Fisher-based CNN 99.05 93.23 73.40
6.3. Computational Time Analysis
The training and testing time of three methods are shown in Table 4. The testing time is
counted from implementation of test image No. 1. Compared with the traditional Method 1,
the training processed of CNN based Methods 2 and 3 are time-consuming. However, in training
epoch, the proposed LPP is the lowest.Sensors 2018, 18, 3042 11 of 13
Table 4. Time spent comparison.
Index Methods Training Epoch Training Time (s) Testing Time (s)
1 STRUM AdaBoost 1000 138 5.1
2 Block-wise CNN 600 33,084 0.2
3 LPP 200 15,411 10.7
In application, the training time of LPP can be greatly shortened by using a GPU accelerator.
Also, the training phase can be implemented offline. In that case, the proposed method can be
employed for real-time inspection application.
7. Conclusions
In this paper, we propose a robotic vision-based crack detection method. A local pattern predictor
with the objective of detecting concrete surface cracks pixel-wisely can set up the underlying mapping
function between a pixel’s probability of belonging to cracks and its context. Based on a typical
CNN, the local pattern predictor can be trained used to detect cracks in images. A typical database,
including concrete crack images, is collected and open to fill the blank of the database in crack detection.
To the authors’ best knowledge, this represents a first attempt to use deep learning to forge a LPP and
detect cracks in a pixel-wise way. In addition, training dataset selection principles are also investigated
and a uniform sampling method with nearest neighbors is proposed.
The experimental results show the proposed method appears effective and robust. In the future,
authors would like to explore the potential of the Fisher criterion in CNN, as well as integrating the
proposed method into an automatic inspection system.
Author Contributions: Y.L. and H.L. wrote the program and the manuscript. H.W. revised the paper. H.L. is the
corresponding author.
Funding: This work was supported by Beijing Natural Science Foundation (4182020) and Open Fund of
State Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University
(Grant No. 17E01).
Conflicts of Interest: The authors declare no conflict of interest.
References
1. Prasanna, P.; Dana, K.J.; Gucunski, N.; Basily, B.B.; La, H.M.; Lim, R.S.; Parvardeh, H. Automated Crack
Detection on Concrete Bridges. IEEE Trans. Autom. Sci. Eng. 2016, 13, 591–599. [CrossRef]
2. Molina, M.; Frau, P.; Maravall, D. A Collaborative Approach for Surface Inspection Using Aerial Robots and
Computer Vision. Sensors 2018, 18, 893. [CrossRef] [PubMed]
3. Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE
Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA,
20–25 June 2005; Volume 1, pp. 886–893.
4. Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the Seventh IEEE International
Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; Volume 2, pp. 1150–1157.
5. Lim, R.S.; La, H.M.; Shan, Z.; Sheng, W. Developing a crack inspection robot for bridge maintenance.
In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13
May 2011; pp. 6288–6293.
6. Hasan, M.; Roy-Chowdhury, A.K. A Continuous Learning Framework for Activity Recognition Using Deep
Hybrid Feature Models. IEEE Trans. Multimed. 2015, 17, 1909–1922. [CrossRef]
7. Viciana-Abad, R.; Marfil, R.; Perez-Lorenzo, J.M.; Bandera, J.P.; Romero-Garces, A.; Reche-Lopez, P. Audio-visual
perception system for a humanoid robotic head. Sensors 2014, 14, 9522–9545. [CrossRef] [PubMed]
8. Amatya, S.; Karkee, M.; Zhang, Q.; Whiting, M.D. Automated Detection of Branch Shaking Locations for
Robotic Cherry Harvesting Using Machine Vision. Robotics 2017, 6, 31. [CrossRef]Sensors 2018, 18, 3042 12 of 13
9. Alzarok, H.; Fletcher, S.; Longstaff, A.P. 3D Visual Tracking of an Articulated Robot in Precision Automated
Tasks. Sensors 2017, 17, 104. [CrossRef] [PubMed]
10. Yu, H.; Zhu, J.; Wang, Y.; Jia, W.; Sun, M.; Tang, Y. Obstacle classification and 3D measurement in unstructured
environments based on ToF cameras. Sensors 2014, 14, 10753–10782. [CrossRef] [PubMed]
11. Indri, M.; Trapani, S.; Lazzero, I. Development of a Virtual Collision Sensor for Industrial Robots. Sensors
2017, 17, 1148. [CrossRef] [PubMed]
12. Sivcev, S.; Rossi, M.; Coleman, J.; Omerdic’, E.; Dooly, G.; Toal, D. Collision Detection for Underwater ROV
Manipulator Systems. Sensors 2018, 18, 1117. [CrossRef] [PubMed]
13. Leite, A.; Pinto, A.; Matos, A. A Safety Monitoring Model for a Faulty Mobile Robot. Robotics 2018, 7, 32.
[CrossRef]
14. Koch, C.; Georgieva, K.; Kasireddy, V.; Akinci, B.; Fieguth, P.W. A review on computer vision based defect
detection and condition assessment of concrete and asphalt civil infrastructure. Adv. Eng. Inform. 2015, 29, 196–210.
[CrossRef]
15. Abdel-Qader, I.; Abudayyeh, O.; Kelly, M.E. Analysis of edge-detection techniques for crack identification in
bridges. J. Comput. Civ. Eng. 2003, 17, 255–263. [CrossRef]
16. Li, G.; He, S.; Ju, Y.; Du, K. Long-distance precision inspection method for bridge cracks with image processing.
Autom. Constr. 2014, 41, 83–95. [CrossRef]
17. Tong, X.; Guo, J.; Ling, Y.; Yin, Z. A new image-based method for concrete bridge bottom crack detection.
In Proceedings of the 2011 International Conference on Image Analysis and Signal Processing, Wuhan,
Hubei, China, 21–23 October 2011; pp. 568–571.
18. Oh, J.K.; Jang, G.; Oh, S.; Lee, J.H.; Yi, B.J.; Moon, Y.S.; Lee, J.S.; Choi, Y. Bridge inspection robot system with
machine vision. Autom. Constr. 2009, 18, 929–941. [CrossRef]
19. Hutchinson, T.C.; Chen, Z.Q. Improved Image Analysis for Evaluating Concrete Damage. J. Comput. Civ. Eng.
2006, 20, 210–216. [CrossRef]
20. Adhikari, R.; Moselhi, O.; Bagchi, A. Image-based retrieval of concrete crack properties for bridge inspection.
Autom. Constr. 2014, 39, 180–194. [CrossRef]
21. Dinh, T.H.; Ha, Q.P.; La, H.M. Computer vision-based method for concrete crack detection. In Proceedings of the
2016 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phuket, Thailand,
13–15 November 2016; pp. 1–6.
22. Lim, R.S.; La, H.M.; Sheng, W. A Robotic Crack Inspection and Mapping System for Bridge Deck Maintenance.
IEEE Trans. Autom. Sci. Eng. 2014, 11, 367–378. [CrossRef]
23. Yamaguchi, T.; Hashimoto, S. Fast crack detection method for large-size concrete surface images using
percolation-based image processing. Mach. Vis. Appl. 2010, 21, 797–809. [CrossRef]
24. Nguyen, H.N.; Kam, T.Y.; Cheng, P.Y. An Automatic Approach for Accurate Edge Detection of Concrete
Crack Utilizing 2D Geometric Features of Crack. Signal Process. Syst. 2014, 77, 221–240. [CrossRef]
25. Kapela, R.; Sniatala, P.; Turkot, A.; Rybarczyk, A.; Pozarycki, A.; Rydzewski, P.; Wyczalek, M.; Bloch, A. Asphalt
surfaced pavement cracks detection based on histograms of oriented gradients. In Proceedings of the 2015 22nd
International Conference Mixed Design of Integrated Circuits Systems (MIXDES), Torun, Poland, 25–27 June 2015;
pp. 579–584.
26. Wi, H.; Nguyen, V.; Lee, J.; Guan, H.; Loo, Y.C.; Blumenstein, M. Enhancing Visual-based Bridge Condition
Assessment for Concrete Crack Evaluation Using Image Processing Techniques. IABSE Symp. Rep. 2013, 101, 479–480.
[CrossRef]
27. Zhao, H.; Ge, W.; Li, X. Detection of crack defect based on minimum error and pulse coupled neural networks.
Chin. J. Sci. Instrum. 2012, 33, 637–642.
28. Abdel-Qader, I.; Pashaie-Rad, S.; Abudayyeh, O.; Yehia, S. PCA-Based algorithm for unsupervised bridge
crack detection. Adv. Eng. Softw. 2006, 37, 771–778. [CrossRef]
29. Lattanzi, D.; Miller, G.R. Robust Automated Concrete Damage Detection Algorithms for Field Applications.
J. Comput. Civ. Eng. 2014, 28, 253–262. [CrossRef]
30. Bu, G.P.; Chanda, S.; Guan, H.; Jo, J.; Blumenstein, M.; Loo, Y.C. Crack detection using a texture analysis-based
technique for visual bridge inspection. Electron. J. Struct. Eng. 2015, 14, 41–48.
31. Chaudhury, S.; Nakano, G.; Takada, J.; Iketani, A. Spatial-Temporal Motion Field Analysis for Pixelwise
Crack Detection on Concrete Surfaces. In Proceedings of the 2017 IEEE Winter Conference on Applications
of Computer Vision (WACV), Santa Rosa, CA, USA, 24–31 March 2017; pp. 336–344.Sensors 2018, 18, 3042 13 of 13
32. Li, G.; Zhao, X.; Du, K.; Ru, F.; Zhang, Y. Recognition and evaluation of bridge cracks with modified active
contour model and greedy search-based support vector machine. Autom. Constr. 2017, 78, 51–61. [CrossRef]
33. Qian, B.; Tang, Z.; Xu, W. Pavement crack detection based on sparse autoencoder. Trans. Beijing Inst. Technol.
2015, 35, 800–804.
34. Schmugge, S.J.; Rice, L.; Nguyen, N.R.; Lindberg, J.; Grizzi, R.; Joffe, C.; Shin, M.C. Detection of cracks in nuclear
power plant using spatial-temporal grouping of local patches. In Proceedings of the 2016 IEEE Winter Conference
on Applications of Computer Vision (WACV), Lake Placid, NY, USA, 7–10 March 2016; pp. 1–7.
35. Hinton, G.E.; Salakhutdinov, R.R. Reducing the dimensionality of data with neural networks. Science 2006,
313, 504–507. [CrossRef] [PubMed]
36. Hinton, G.E.; Osindero, S.; Teh, Y.W. A fast learning algorithm for deep belief nets. Neural Comput. 2006,
18, 1527–1554. [CrossRef] [PubMed]
37. Maher, A.; Taha, H.; Zhang, B. Realtime multi-aircraft tracking in aerial scene with deep orientation network.
J. Real-Time Image Process. 2018, 1–13. [CrossRef]
38. Zhang, B.; Luan, S.; Chen, C.; Han, J.; Wang, W.; Perina, A.; Shao, L. Latent Constrained Correlation Filter.
IEEE Trans. Image Process. 2018, 27, 1038–1048. [CrossRef] [PubMed]
39. Luan, S.; Zhang, B.; Zhou, S.; Chen, C.; Han, J.; Yang, W.; Liu, J. Gabor Convolutional Networks. IEEE Trans.
Image Process. 2017, 27, 4357–4366. [CrossRef] [PubMed]
40. Zhang, B.; Yang, Y.; Chen, C.; Yang, L.; Han, J.; Shao, L. Action Recognition Using 3D Histograms of Texture
and A Multi-Class Boosting Classifier. IEEE Trans. Image Process. 2017, 26, 4648–4660. [CrossRef] [PubMed]
41. Li, Y.; Zhao, W.; Pan, J. Deformable Patterned Fabric Defect Detection with Fisher Criterion-Based Deep
Learning. IEEE Trans. Autom. Sci. Eng. 2017, 14, 1256–1264. [CrossRef]
42. Li, Y.; Ai, J.; Sun, C. Online Fabric Defect Inspection Using Smart Visual Sensors. Sensors 2013, 13, 4659–4673.
[CrossRef] [PubMed]
43. Li, Y.; Zhang, C. Automated vision system for fabric defect inspection using Gabor filters and PCNN.
SpringerPlus 2016, 5, 765. [CrossRef] [PubMed]
44. Li, Y.; Zhang, J.; Lin, Y. Combining Fisher Criterion and Deep Learning for Patterned Fabric Defect Inspection.
IEICE Trans. Inform. Syst. 2016, 99, 2840–2842. [CrossRef]
45. LÉcun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE
1998, 86, 2278–2324. [CrossRef]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access
article distributed under the terms and conditions of the Creative Commons Attribution
(CC BY) license (http://creativecommons.org/licenses/by/4.0/).You can also read