Active-Sensing Epidermal Stretchable Bioelectronic Patch for Noninvasive, Conformal, and Wireless Tendon Monitoring
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
AAAS Research Volume 2021, Article ID 9783432, 12 pages https://doi.org/10.34133/2021/9783432 Research Article Active-Sensing Epidermal Stretchable Bioelectronic Patch for Noninvasive, Conformal, and Wireless Tendon Monitoring Sheng Shu ,1,2 Jie An,1,2 Pengfei Chen,1,2 Di Liu,1,2 Ziming Wang,1,2 Chengyu Li,3 Shuangzhe Zhang ,1,2 Yuan Liu,1,2 Jianzhe Luo ,1,2 Lulu Zu,1,2 Wei Tang ,1,2,3,4 and Zhong Lin Wang 1,5,6 1 CAS Center for Excellence in Nanoscience, Beijing Key Laboratory of Micro-Nano Energy and Sensor, Beijing Institute of Nanoenergy and Nanosystems, Chinese Academy of Sciences, Beijing 100083, China 2 School of Nanoscience and Technology, University of Chinese Academy of Sciences, Beijing 100049, China 3 Center on Nanoenergy Research, School of Physical Science & Technology, Guangxi University, Nanning 530004, China 4 Institute of Applied Nanotechnology, Jiaxing, Zhejiang 314031, China 5 CUSPEA Institute of Technology, Wenzhou, Zhejiang 325024, China 6 School of Materials Science and Engineering, Georgia Institute of Technology, Atlanta, GA 30332-0245, USA Correspondence should be addressed to Wei Tang; tangwei@binn.cas.cn and Zhong Lin Wang; zhong.wang@mse.gatech.edu Received 5 March 2021; Accepted 22 May 2021; Published 21 June 2021 Copyright © 2021 Sheng Shu et al. Exclusive Licensee Science and Technology Review Publishing House. Distributed under a Creative Commons Attribution License (CC BY 4.0). Sensors capable of monitoring dynamic mechanics of tendons throughout a body in real time could bring systematic information about a human body’s physical condition, which is beneficial for avoiding muscle injury, checking hereditary muscle atrophy, and so on. However, the development of such sensors has been hindered by the requirement of superior portability, high resolution, and superb conformability. Here, we present a wearable and stretchable bioelectronic patch for detecting tendon activities. It is made up of a piezoelectric material, systematically optimized from architectures and mechanics, and exhibits a high resolution of 5:8 × 10−5 N with a linearity parameter of R2 = 0:999. Additionally, a tendon real-time monitoring and healthcare system is established by integrating the patch with a micro controller unit (MCU), which is able to process collected data and deliver feedback for exercise evaluation. Specifically, through the patch on the ankle, we measured the maximum force on the Achilles tendon during jumping which is about 16312 N, which is much higher than that during normal walking (3208 N) and running (5909 N). This work not only provides a strategy for facile monitoring of the variation of the tendon throughout the body but also throws light on the profound comprehension of human activities. 1. Introduction sensors with high sensitivity and fast response time hin- dered its further development [3]. Musculoskeletal diseases are one of the main causes of dis- Noninvasive bioelectronic devices could be a promising ability worldwide. In America, around 14 million people approach to solve the above problems. The inertial system per year suffer from tendon, ligament, and joint injuries provides a low-cost, small-volume strategy for the tendon’s [1, 2]. Current clinical practice for tendon monitoring, epidermal testing, but the inevitable drift distortion affects such as magnetic resonance imaging (MRI) or ultrasound, its continuous monitoring [8]. The integrated sensor suit could provide a snapshot of tendon density and inflamma- overcomes this properly, however, owing to the multijoint tion but requires laboratory and high-cost equipment, linkages; it can only give a synergetic motion result rather reducing the possibility of real-time personal care [3, 4]. than that from a specific moving part [9–14]. Nowadays, Implantable sensors could be used to assess real-time the vibration property of the tendon has been detected and monitoring, allowing personalization of a rehabilitation used as an evaluation parameter, which improves the protocol [5–7]. But the inconvenience of surgery, the strict accuracy of epidermal monitoring, but rigid vibration gener- requirements of biocompatible materials, and the need for ators and accelerometers greatly reduce the wearability and
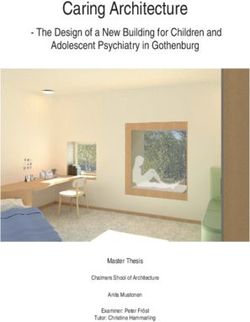
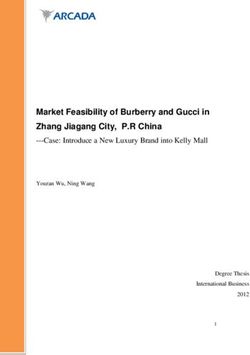
2 Research comfort [15–17]. Epidemical wearable sensors offer a more of polyimide (PI, with a thickness of 110 μm) and printed promising approach due to their light weight, low cost, copper, are employed to connect with the sensing unit, flexibility, and stretchability [18, 19]. We can obtain per- ensuring the whole device’s flexibility and electrical contact. sonal physical information by monitoring the heartbeat An optical image of the fabricated patch with a total length [20, 21], pulse [22, 23], sweat [24, 25], and even respira- of 8 mm is shown with a tweezer, and its open-circuit voltage tion [21, 26, 27] with the help of these sensors. But under 20% stretching is presented in Supplementary Fig. 1. extracting physiological information from tendon activities Many researches proposed advanced folding technology is still rarely reported. for constructing 3D mesostructures for polymer devices Based on mechanically induced polarization, piezo- [32, 36, 39, 40]. Figure 1(b) shows a variety of our sensing electric devices have the characteristics of high sensitivity units with three-dimensional (3D) structures, including ori- [13, 28] and self-powered ability [29, 30]. Besides, their gami (left), bending (middle left), winding (middle right), inherent mechanical linear response makes them ideal and kirigami (right). These structures demonstrate the diver- sources for continuous dynamic tendon monitoring [31]. It sification of our fabrication approach. It begins with the use can be found in the literature that thin-film devices are of a laser-cutting process to define a two-dimensional (2D) widely used in flexible electronics/optoelectronics, biomedi- precursor made up of PVDF. Then, the as-fabricated precur- cal devices, energy storage, and conversion systems [32, 33]. sor is transferred onto a prestrained elastomer covered with a Through structural design, such as origami [34], kirigami thin layer of designed adhesive barrier (polyethylene tere- [35], bending [36], and winding [37], a thin piezoelectric film phthalate (PET) film with 50 μm in thickness), so that the can be transformed to various two-dimensional (2D) or release of the prestrained substrate will transform the plane three-dimensional (3D) structures [38], which can give the device into a well-defined resultant 3D architecture (Supple- devices new features such as stretchability and also enable mentary Fig. 2). Additional details are presented in Methods them to deliver an accurate output in the required applica- and in Supplementary Note 1. Such strategies establish tion conditions. approaches to fabricate 3D sensing units with various geom- Here, we report an epidermal stretchable bioelectronic etries, which are determined by the 2D precursor and the patch with a multiform-structured piezoelectric film. The arrangement and magnitude of the prestrained elastomer patch can deform and stretch with the muscle and thus mon- substrate, as well as the profile of the adhesive barrier layer. itor tendon activities in real time. By integrating it with a To avoid the adhesion during large stretch, the fractal struc- micro controller unit (MCU), a tendon healthcare system is ture [40] is introduced and shown in Supplementary Fig. 3. developed, which is able to collect and analyze motion data, With extremely fine curves and complex structures, it pro- display out on a smart phone, and finally serve as a reminder vides a relatively low adhesion between the PVDF films and for personal daily exercising. Moreover, the whole flexible the elastomer by virtue of the rough interface. After forming and stretchable packaging makes the entire system extraordi- a 3D device, it can, therefore, smoothly switch between 2D narily compliant. The rational use of commercial sports tape and 3D geometries as stretching and releasing of the elasto- protects the device from the trouble of sweat and looseness as mer. Additionally, 2D-structured units could also exhibit well. By attaching the patch on various muscles, we can pre- excellent stretchability and meanwhile remain an ultralow cisely obtain tendon stretching motions around our body. thickness. As shown in Figure 1(c), various stretchable 2D And the Achilles’s tendon (AT) is then systematically inves- sensing units are designed and manufactured, including zig- tigated. Our research has created a new epidermal monitor- zag (left), rhomb (middle left), serpentine (middle right), and ing system that could provide injury precaution and net (right). Detailed fabrication information for 2D shapes is targeted treatments for tendons and generate personalized described in Methods and Supplementary Note 1. advice for individual recovery and professional sports train- Afterwards, all above structures are modeled (Supple- ing in the future. mentary Fig. 4-5), and finite element analysis (FEA) is conducted (Supplementary Note 2) to examine the devices’ 2. Results output performance. The forces applied here are tensile stresses acting on the cross sections at both ends of these 2.1. Multiform Epidermal Musculotendinous Sensing Unit. structures. Figures 1(d)–1(f) illustrate FEA results of three The musculotendinous sensing unit consists of functional representative structures. It reveals that these structures have piezoelectric films, metal conductors, and dielectric mate- excellent linearity, suitable for force sensing. More simula- rials. Facile and mass fabrication processes such as laser tions about 2D and 3D structures can be found in Supple- cutting and printing are utilized. Figure 1(a) illustrates the mentary Fig. 6-7. The results indicate that the 3D structures soft, stretchable musculotendinous bioelectronic patch have advantages in terms of tensile performance and voltage applied all around the body. The exploded view shows the output (Supplementary Note 3), which is due to their rela- patch’s stratified structure, consisting of a layer of piezoelec- tively large precursors and sufficient prestrain. Nevertheless, tric polymer (polyvinylidene difluoride, PVDF, with a 2D structures have the superiority in thickness and attach- thickness of 28 μm) and two layers of metal on the top able comfort as wearable devices attached on tendons. (Cr/Ag, 10 nm/135 nm in thickness) and bottom (silver paste, 6 μm in thickness) surfaces, as well as two layers of superelas- 2.2. Design and Characteristics of the Epidermal Patch. Here, tic adhesive tapes (polyacrylate two-sided rubber, 1 mm), three typical structures, with a total length of 50 mm, are serving as the peripheral package. Electrical wires, made up designed and experimentally compared, including wave

Research 3 Top electrode Cu PI Adhesive tape Top conductive layer Piezoelectric layer Bottom conductive layer Bottom electrode (a) Flower Wave Spring Flake (b) Zigzag Rhomb Serpentine Net (c) 10 0.10 8 Slope = 1.822 V/mN 120 Slope = 24.975 V/mN Slope = 0.017 V/mN 0.08 6 90 0.06 VOC (V) VOC (V) VOC (V) 4 60 0 0.04 10 0 –20 2 0 –10 30 –40 0.02 –10 –20 0 0 0.00 0 1 2 3 4 5 0 1 2 3 4 5 0 1 2 3 4 5 F (mN) F (mN) F (mN) 3D structure (wave) 3D fractal (three orders) 2D shape (serpentine) (d) (e) (f) Figure 1: Multiform bioelectronic patch and 3D mesoscale piezoelectric frameworks. (a) Applications (left) and an exploded view of the patch (right). (b) Optical images of representative 3D mesoscale networks made up of PVDF, including origami (left), bending (middle left), winding (middle right), and kirigami (right). (c) Optical images of representative 2D structures by laser cutting, including zigzag (left), rhomb (middle left), serpentine (middle right), and net (right). Scale bars, 2 mm. (d–f) FEA results of typical structures: 3D structure (wave) (d), fractal structure (second order) (e), and 2D structure (serpentine) (f).

4 Research 8 1.2 20 6 0.9 16 VOC (V) VOC (V) VOC (V) 12 4 0.6 8 2 0.3 R2 = 0.997 R2 = 0.996 4 R2 = 0.999 0 Slope = 1.547 0.0 Slope = 0.205 Slope = 5.302 0 0 1 2 3 4 5 0 1 2 3 4 5 6 0 1 2 3 4 F (N) F (N) F (N) (a) (b) (c) t 0 w L R0 l Substrate (d) (e) (f) 60 20 50 80 40 45 15 60 VOC (V) VOC (V) VOC (V) VOC (V) 30 40 30 10 20 10 20 15 5 0 0 0 0 0 1 2 3 4 0 1 2 3 4 0 1 2 3 4 0 1 2 3 4 F (N) F (N) F (N) F (N) R0 = 3 mm R0 = 6 mm 0 = 120° 0 = 150° 1 arc 1 unit R0 = 4 mm R0 = 7 mm 0 = 180° 0 = 210° 2 arcs 2 units R0 = 5 mm 0 = 240° 0 = 270° 3 arcs 3 units (g) (h) (i) (j) 200 16 8 100 0 12 6 –100 VOC (V) VOC (V) –200 8 4 (n) 4 2 3 2 0 1 0 0 15 30 45 60 0 0.05 0.1 0.2 0.5 1 5 0 –1 Time (s) Velocity (m/s) 0.5 N 1N 1.5 N 2N 2.5 N 3N (k) (l) (m) (o) Figure 2: Design and optimization of the soft epidermal bioelectronic patch as well as its characteristics. (a–c) Experimental results of open- circuit voltage and linearity of different structures, including wave (a), spring (b), and serpentine (c). (d) Design diagram for the serpentine structure. (e) An optical imaging of the patch being stretched. (f) A potential application of the structure in a robotic hand. (g, h) Devices’ output with various structure parameters: the radius (g) and the arc angle (h). (i, j) Devices’ output with various unit connections, in series (i) and in parallel (j). (k) Diagram of open-circuit voltage under different forces. (l) The effect of different speeds on open-circuit voltage under a force of 1 N. (m) An optical image of the patch under bending. (n, o) FEA diagrams of surface potential when the patch is stretched and bent, respectively.

Research 5 (Figure 2(a)), spring (Figure 2(b)), and serpentine tion on per unit length in the longitudinal will decrease under (Figure 2(c)), and corresponding optical photographs are the same tension, which is the main reason for the output’s shown in the insets. They all have excellent linearity, but initial decrease. As the angle continues to increase, some spi- the open-circuit voltage of the 2D structure (serpentine) is nodal appears. We speculate that the stretch-induced stress significantly higher than that of the 3D (wave and spring) might be loaded on these spinodal, which increases the over- under the same force, which is contrary to previous simula- all device’s output to some degree. This could also be verified tions. This is because the above simulation model only con- by Supplementary Fig. 16. Besides, we also checked the influ- tains a PVDF film, excluding the influence of the silicone ence of the PVDF thickness (28, 52, and 110 microns) (Sup- substrate, while in practical experiments, the film will be plementary Fig. 18), and no obvious influence is obtained. restricted by the substrate. It is verified by a stretch FEA with Subsequently, we studied the device performance with a silicone substrate, shown in the Supplementary Fig. 8. various connections. As shown in Figures 2(i) and 2(j) and Moreover, it also suggests that the silicone will introduce a Supplementary Fig. 19-22 (with θ0 = 240° , R0 = 6 mm, w = lot of small deformations in the process of being stretched, 3 mm, t = 28 μm, and unit number of 1.5), arcs are con- so the stress distribution on the 2D units is more uniform. nected in serials and parallel with a fixed overall length of Therefore, 3D devices possess a thicker rubbery packaging, 50 mm. It is found that the larger the arcs’ number is, the increasing the thickness of the whole sensor and reducing lower the output is, under the same tension. The explanation the attachability. Meanwhile, it shows a relatively lower out- is similar to that of angle-induced influence, which is as the put. Thus, the 2D serpentine structure is selected in our fol- number increases, the deformation on per unit length will lowing experiments. decrease under the same tension, which is why the output Figure 2(d) shows a fundamental shape of our 2D sensing decreases. But it is notable to mention that more arcs mean unit with overall consideration of stretchability, flexibility, better tensile property, and reasonable tensile property is and compliance. It consists of two identical arc segments, required to balance the output performance and the feasibil- defined by using arc angle (θ0), radius (R0), width (w), and ity to apply on the human body. Figure 2(j) plots the results thickness (t). The total length of the patch is set at 50 mm. measured when the units are connected in parallel, which An optical image of the patch being stretched is presented shows that as the number increases, the output decreases. in Figure 2(e), and the designed maximum strain can reach It is attributing to that, under the same tension, more units more than 50%. Figure 2(f) shows a potential application of in parallel will lead to lower deformation and thus lower out- the structure in a robot hand. This fully flexible and stretch- put. Subsequently, the maximum strain of different radii and able sensor will also have great prospects in the robotic field. angles is measured (Supplementary Fig. 23), indicating that Figures 2(g)–2(j) and Supplementary Fig. 9-16 present the maximum strain increases with the radius and angle. devices’ output performance as a function of the increasing Therefore, sensors with a radius of 6 mm, arc angle of 180°, stretching force, with various devices’ geometric parameters. width of 3 mm, and 3 half units in serial, which could ensure Experiments are conducted by stretching the sensing units a maximum strain over 30%, is selected as the standard serially between a linear motor and an ergometer (Supple- device for the following experiments. mentary Fig. 17). Structures with different widths are firstly Figure 2(k) shows the open-circuit voltage of the device examined (Supplementary Fig. 9-10, with R0 = 6 mm, θ0 = based on the above parameters, under diverse forces. It shows 240° , t = 28 μm, and unit number of 1.5). It can be seen that a good repeatability. Tiny mismatches might be due to the the output changes as the width varies. In this regard, the forces delivered by the linear motor being uneven. Afterwards, PVDF can be made narrow to ensure that the sensing com- we evaluate the influence of different speeds with a tension of ponent is cost-effective without lowering the output perfor- 1 N (Figure 2(l)). Waveforms are exhibited in Supplementary mance. The radius (R0 ) is another key device parameter. Fig. 24. The results show no significant difference, which is When it increases, the proportion of the arc part will increase similar to FEA results under various frequencies (Supplemen- accordingly, as shown in Supplementary Fig. 9, making the tary Fig. 25). An excellent stretch-rebound ability is exhibited patch more stretchable. Figure 2(g) and Supplementary Fig. in Supplementary Fig. 26. After applying a constant strain of 11-12 (with θ0 = 240° , w = 3 mm, t = 28 μm, and unit number 20% for more than 20,000 cycles, the open-circuit voltage of 1.5) plot the measuring results. It shows that as the radius value increases by 10% (Supplementary Fig. 27). Moreover, increases, the open-circuit voltage decreases under the same when being applied to the human body, the patch will inevita- tension, and the decreasing trend will gradually lessen. It bly be bent (Figure 2(m)), suggesting that the output might be could be attributed to that as the radius increases, the average affected by bending. Supplementary Fig. 28 shows the output deformation on per unit length in the longitudinal decreases, under a bending about 25% (more than 20°). It can be seen and thus, the output voltage decreases accordingly. And this that, compared with the output under stretching, this output is verified by the FEA results in Supplementary Fig. 13. More- (about 0.3 V) is almost negligible. Figures 2(n) and 2(o) and over, the angle of the arc (θ0 ) is found to increase the size of Supplementary Movie S1 are the FEA diagram of surface the PVDF and thus enhance the tensile properties. Results potential distribution when the device is stretched and bent, displayed in Figure 2(h) and Supplementary Fig. 14-15 (with respectively, verifying the above analysis. R0 = 6 mm, w = 3 mm, t = 28 μm, and unit number of 1.5) show that the open-circuit voltage decreases from 120° to 2.3. Wearable Physical Property Sensing. The response time 240° as the angle increases and rises slightly after 240°. It of the sensing unit, critical for real-time monitoring, is mea- could be explained that as the angle increases, the deforma- sured and shown in Figure 3(a) and its inset. The stretch-
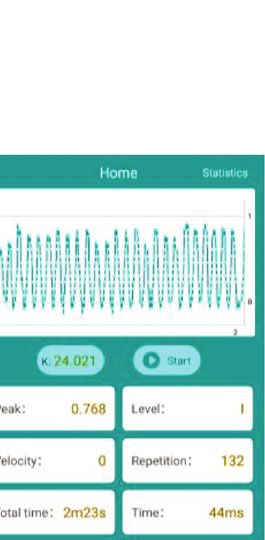
6 Research 2 20 20 3 VOC (V) 70 2 1 15 15 2 Force (N) 2 mV VOC (mV) VOC (V) VOC (V) VOC (V) 0 1 0 5 10 15 20 10 10 Time (ms) 60 0 1 5 5 Slope = 8.605 –1 R2 = 0.995 0 0 0 0 50 100 150 200 250 50 0 2 4 6 8 10 0.0 0.5 1.0 1.5 2.0 2.5 0 4 8 12 Time (ms) Time (s) F (N) Time (ms) Precious commercial stress sensor EX data Step line The patch Linear fit for EX data Noise signal (a) (b) (c) (d) 50 6 VOC (V) VOC (V) 25 3 0 0 0 2 4 6 8 10 0 2 4 6 8 10 Time (s) Time (s) (e) (f) 100 6 VOC (V) VOC (V) 50 3 0 0 0 5 10 15 20 0 2 4 6 8 Time (s) Time (s) (g) (h) 50 VOC (V) 25 120 0 VOC (V) 0 10 20 30 80 50 VOC (V) 25 40 0 0 10 20 30 40 0 Time (s) (i) (j) Data processing & transmission 0.9 APP Power 0.6 F (N) management Data acquisition 0.3 0.0 0 4 6 8 10 12 14 Time (s) (k) (l) Real-time Sensor MCU display Self-generated signal Signal acquisition Data processor Bluetooth to APP (m) (n) Figure 3: Wearable system validation of the patch on the tendon. (a) The response time of the patch, and the patch is serially connected with a commercial force sensor. (b) The synchronized diagram of the open-circuit voltage obtained by the patch and the corresponding stretching force measured by the commercial sensor. (c) Linear relationship between measured voltage and force in biceps. (d) A sensor-resolved voltage ladder diagram. (e–h) Open-circuit voltage of the patch sticking to the sternocleidomastoid (e), triceps brachii (f), erector spine (g), and gastrocnemius (h). (i) Swing and pause diagrams during the measurement of the sternocleidomastoid muscle. (j) Statistics diagram of signals obtained from various tendons all over the body. (k) An optical image of the MCU devised for portable purpose. (l) The signals of the patch at different frequencies on biceps brachii acquired from the MCU. (m) The operating procedures of the system. (n) Demonstration of applying the patch for recoding the arm’s bending; the inset is a screenshot from the APP on the mobile phone.

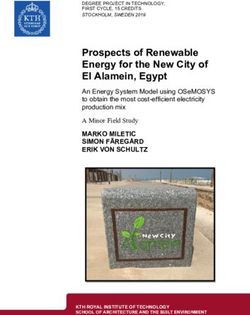
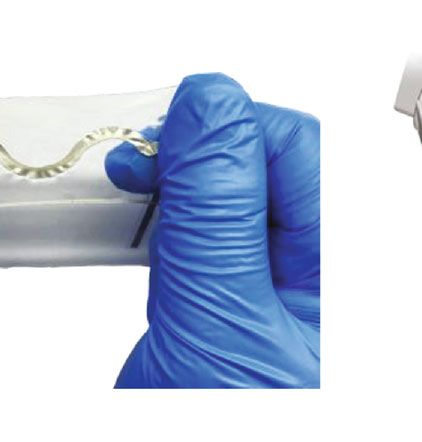
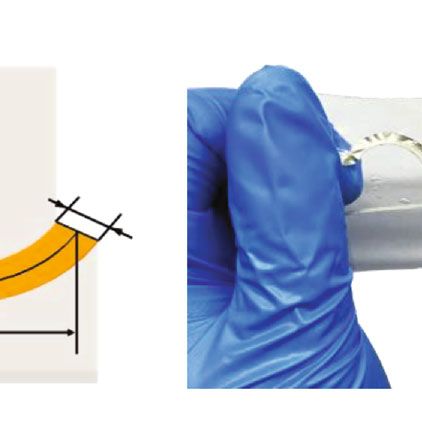
Research 7 release cycle indicates a response time lower than 18 ms, our sensing system can generate an intuitive feedback by grad- which guarantees a timely feedback. A comparison between ing and counting the force of each movement in the APP, pro- our patch and a commercial force sensor (resolution about viding useful advice for the profession sports actions or 1 mN) is performed and shown in Figure 3(b) and Supple- accurate medical rehabilitation. mentary Fig. 29. The patch and the commercial sensor are connected in serial and attached to the upper arm. Excellent 2.4. Noninvasive Achilles Tendon (AT) Monitoring System. correspondence of the open-circuit voltage and the stretch- Ankle injury is one of the most common sports injuries, ing force is observed. The linear fitting is shown in and it accounts for 40% of athletic injuries [42]. Achilles ten- Figure 3(c), with R2 = 0:995 and slope = 8:605. In addition, don (AT) management is required to reduce such injuries. we plot the loading curve with the time in Figure 3(d), which Based on the previous analysis, we use this epidermal bioelec- shows that the voltage increased gradually as the applied tronic patch to monitor the AT activity in real time. The force increases, with an increase of about 2 mV. Furthermore, patch is attached directly on the epidermis between the fibula since the equipment noise is only 0.5 mV in our experiments, and the calcaneus and deforms as the tendon stretches and the theoretical measurement resolution of the patch can be releases (Figure 4(a)). A MCU is connected and embedded calculated out, which is 5:8 × 10−5 N. in a fabric strap, for data collecting, processing, and transmit- Figures 3(e)–3(h) and Supplementary Fig. 30 illustrate ting to a smartphone via Bluetooth. various motion signals obtained from our patch via attaching Figure 4(b) plots out the measured signals of a basketball to the sternocleidomastoid, triceps brachii, erector spine, gas- player during dribbling, running, and jump shooting. It is trocnemius, deltoid, anterior knee ligament, quadriceps interesting to find that the player shows a movement fre- femoris, and hamstring, respectively. Related actions are quency of about 0.69 and 1.59 Hz when dribbling and run- illustrated beside each diagram, and the patch location is ning, respectively. And the voltage outputs are 35.4 and marked via a yellow circle. It can be seen that, due to the thin- 65.2 V, respectively. Through the calculation in Supplemen- ness, flexibility, and stretchability, the patch can be placed all tary Note 4, we can approximately get the forces applied on over the human body and monitor the tendon’s activity in the AT, which are 3208 N and 5909 N. Notably, in a medical real time. The signal’s peak value reflects the motion ampli- experiment that used physical methods to measure the force tude, which can serve as an indicator to prevent damage on the AT, the peak forces during walking and running are caused by excessive amplitude, and the signal’s frequency 3.9 and 7.7 times the body weight, respectively [43] (about and shape reflect the motion velocity and whether the action 2869 N and 5660 N in our test), showing a good match. is distorted, etc. It can be seen from Figure 3(e), the frequency Moreover, during jump shooting, the tendon’s loading time of the head swing is about 0.6 Hz, and the maximum ampli- is about 0.495 s, with a recovering time of 0.31 s when land- tude is about 41.3 V (4.8 N). When there are external swings ing. And it delivers the highest output of about 180 V, indi- or stagnation actions (Figure 3(i)), the waveform varies cating that the greatest force on the AT is about 16312 N. accordingly (Supplementary Movie S2). We also plot a statis- This result might give a reasonable explanation for the fact tical diagram to give an overlook of the force amplitude of that during basketball games, ankle injuries mostly occur at human daily motions, as shown in Figure 3(j). The erector the moment of landing (45% of all AT injuries) [44]. In spinae muscles show an apparent high value, meaning a large Figure 4(c), we analyze a set of typical badminton actions, force during the according motion, which might explain why including cross step and jump smash. An enlarged inset with low back pain is the leading cause of global disability [1, 41]. decomposed actions is also presented. We can see that, dur- Figure 3(k) exhibits a MCU with data acquisition, process- ing the cross step, the player alters his supporting leg, result- ing, and Bluetooth transmission modules. It is 3 cm × 4 cm in ing in two peaks, about 7089 and 10868 N. Subsequently, if size, has a four-ply board craft, and utilizes the capacitive there comes a deep high service, a deep shot will result in a measuring principle to match the high impedance of the pie- small voltage peak, while a clear ball will lead to a much larger zoelectric polymer. The incorporation of above-mentioned peak. In addition, when smashing, a series of jumping peaks devices constitutes an active force measurement system which will appear (Supplementary Movie S4). Accordingly, jump could actively sense and record deformation states of tendons smash will deliver the highest load on the Achilles tendon, and display it on the cellphone in real time. The signal of the which is about 15587 N in our test. As a comparison, in patch obtained by our integrated circuit, during deformation Figure 4(d), we illustrate the voltage signals for a table tennis with the biceps brachii, is plotted in Figure 3(l), showing a player’s AT. It can be found that, during swinging, and even similar waveform with that measured by our experimental killing, the force loaded on the AT is about 2519 N, which is equipment of Keithley 6517, and it is displayed in Supplemen- similar to the forces of fast walking (about 2719 N). It might tary Movie S3. Figure 3(m) intuitively shows the operating be why the main injury reason for table tennis fans is not procedures of the system. As vividly depicted in Figure 3(n), focused on the Achilles tendon [45]. We perform the real- while a subject bends the arm, the deformation of the tendon time monitoring on the continuous sports playing and show is simultaneously recorded by the patch, transmitted by the them in Supplementary Movie S5. MCU, and visualized in the mobile application (APP). The Furthermore, we utilize the patch to make a statistic on inserted image is an enlarged view of the APP, in which the the loading forces of AT during personal normal exercises, top part exhibits real-time motions of the tendon, and six sta- including walking, running, and jumping. Subjects with var- tistic parameters are listed below, including force peak, motion ious weights are selected, and the results are exhibited in velocity, and repetitions. As shown in Supplementary Fig. 31, Figure 4(e) and Supplementary Movie S6. The strain on the

8 Research 200 150 VOC (V) 100 50 0 –50 –100 0 5 10 15 20 25 30 Time (s) (b) 150 200 100 VOC (V) 100 VOC (V) 50 0 0 –50 –100 0 5 10 15 20 25 16 20 24 Time (s) Time (s) (c) 100 100 50 50 VOC (V) VOC (V) 0 –50 0 –100 –150 –50 (a) 0 5 10 15 20 15 18 21 Time (s) Time (s) (d) 30 VOC (V) 15 120 0 0 2 4 6 8 Time (s) 120 VOC (V) 90 (f) VOC (V) 60 80 60 VOC (V) 30 0 30 0 1 2 3 4 5 40 Time (s) 0 (g) Tester 1 Tester 2 Tester 3 Tester 4 Tester 5 Tester 1 Tester 2 Tester 3 Tester 4 Tester 5 100 VOC (V) 50 0 0 5 10 15 20 Time (s) Walk (h) Preparation Landing Run Jumping Standing Jump (e) (i) 100 VOC (V) 0 200 –100 VOC (V) 0 2 4 6 8 Time (s) 100 (j) 50 0 VOC (V) Tester 1 0 Dorsiflexion Tester 2 –50 Tester 3 Non-flexion –100 Tester 4 0 2 4 6 8 Plantarflexion Tester 5 Time (s) Tester 6 (k) 50 VOC (V) 0 –50 –100 0 2 4 6 8 Time (s) (l) (m) Heel Foot dorsiflexion strike 1.8 Battery 1.2 F (N) MCU 0.6 Muscle tape 0.0 Midfoot Foot no flexion Sensor strike 0 25 50 75 100 Gait cycle (%) Normal gait Paretic gait (n) (o) (p) Figure 4: Noninvasive Achilles tendon monitoring. (a) Schematic diagram of wearing the system at the Achilles tendon. (b) The open-circuit voltage during basketball playing, including dribbling, running, and jump shooting. (c) The open-circuit voltage during badminton playing, including cross step and jump smash. (d) The open-circuit voltage of the lateral movement and swing in table tennis. (e) The statistic diagram of Achilles’ tendon activity for people walking, running, and jumping. (f–h) The waveform of walking (f), running (g), and jumping (h). (i) The statistic diagram of open-circuit voltage under four different stages during jumping for different people, including preparation, jumping, landing, and standing. (j–l) Optical photographs of jumping with various postures and the waveforms: plantarflexion (j), nonflexion (k), and dorsiflexion (l). (m) A statistical analysis of the specific jumping actions: plantarflexion (yellow), nonflexion (green), and dorsiflexion (blue). (n) An optical image of the patch’s fixation. (o) Using the bioelectronic system for gait analysis. (p) APP displays on a cellphone.

Research 9 AT increases in the order of walking, running, and jumping. As a serpentine patch with a precision of 5:8 × 10−5 N and we can see in Figures 4(f)–4(h), the forces are approximately R2 = 0:999 is selected. Additionally, the patch is applied 2704 N, 5438 N, and 10875 N, respectively. Subsequently, we on various tendons all throughout the body, and it shows study the jumping action in details. Figure 4(i) illustrates the excellent biological compatibility and universal applicability. statistic output values of different people during jumping, which Especially in measurements with the Achilles tendon, our is further divided into four stages: preparation, jumping, land- patch delivers reliable analysis results, corresponds with clin- ing, and standing. As we can see, both preparation and standing ical researches, and can detect action distortion in sports. In actions deliver lower loads, while both jumping and landing addition, we developed a tendon monitoring system, which actions deliver lager force. It is worth noting that, tester 4 shows is capable of real-time monitoring of the tendon’s motions, much lower force than the others do, which is actually due to proceeding collected data, and further offering feedback of the wounds on his foot. In addition, we make a further analysis motion evaluation. With this sensing system, we accomplish of the specific jumping actions, including plantarflexion, non- precise gait analysis and acquire classified statistics of daily flexion, and dorsiflexion. Optical photographs and testing exercise. We anticipate that this bioelectronic patch shows results are presented in Figures 4(j)–4(l). Clinically, an abnor- profound implications for the treatment and precautions of mal vertical ground reaction force will cause an explosive supi- tendon diseases and opens a new door for targeted treat- nation or inversion moment at the subtalar joint in a short time ments that are widely advocated. In the future, the combina- [46], which could be confirmed by the waveform. The peak tion with machine learning and big data analysis can deliver value of the plantarflex jump is relatively round and smooth visual evidence for in-depth analysis and understanding of (Figure 4(j)), while the nonflex jump has a sharp peak (about the movement in our daily life. 1982 N, circled in blue) when landing (Figure 4(k)) due to a shorter landing buffer distance (0.13 s), and the dorsiflex jump 4. Methods generates an extra peak (about 3688 N, Figure 4(l), circled in green). Further statistical analysis of different people jumping 4.1. Fabrication of 2D Piezoelectric Mesostructures. The fabri- in Figure 4(m) can also prove the above phenomenon, in which cation of the stretchy 2D PVDF mesostructures began by the two bars with the same color represent stages of jumping preparing a PVDF film (28 μm in thickness, MEAS) with and landing. As we can see, during plantarflex jumping, the silk-screen printing (6 μm in thickness) on one side. Then, force generated by jumping will be close to that by landing. If two sides of polyimide tape (PI, 25 μm in thickness, Goldfin- jumping abnormally (nonflexion or dorsiflexion), the difference ger) coated with silicone gel (75 μm in thickness, Hon Shih can be found obviously. Database of forces generated by AT Chiao) were tiled onto a Plexiglas substrate (2 mm in thick- activities could provide important therapeutic support for AT ness, Creromem) of suitable size. Bubbles were removed. recovery and posture correction. These results corroborate the After that, the side of the PVDF film with silver paste was potential of the epidermal patch as a high-performance monitor spread on the polyimide tape for graphic processing, and to realize real-time monitoring of AT. the laser-cutting machine (PLS6. 75) was adjusted to the Figure 4(n) shows an optical image of the fixation of our appropriate focal length (0.5 mm), power (20%), and cutting epidermal sensing patch, where the muscle tape and elastic speed (70%). The prepared mask, which is slightly smaller strip serve as the auxiliary (Supplementary Note 5). As than the determined pattern, is placed on the PVDF film, shown in Figure 4(o), Supplementary Fig. 31, and Movie and Cr/Ag (10 nm/135 nm in thickness) is deposited on the S7, we utilize the real-time sensing system to compare a nor- side covered with the mask by magnetron sputtering (Den- mal person’s gait with that of the paretic patient (mimicking ton, Discovery 635). The mask plate is formed by laser cut- by bandage wrapping, which restricts the movement of the ting with a single fluorinated polyethylene terephthalate foot and thus leads to stiffness in the ankle, as shown in Sup- (PET) film (50 μm in thickness). Under the environment of plementary Fig. 32) in one walking cycle. The yellow line rep- alcohol infiltration, the graphical PVDF was stripped by resents the output signal of normal gait, and the blue stands mechanical dissection, which completed the preparation of for the paretic one. It is found that due to the restriction on the 2D precursor. Adhesive VHB tape (polyacrylate two- the ankle, the paretic gait lacks fine movements, and thus, sided rubber, 1 mm) is used to encapsulate and provide resil- the signal exhibits only one peak, whereas that of the normal ience. 2D bioelectronic patches can be obtained by stacking gait generates two peaks, corresponding to the contacting the VHB tape, bottom electrode, 2D precursor, top electrode, point between the foot and the floor, shifting forward. Details and VHB tape in sequence. These are done on release paper such as the peak force and the stepping velocity can be seen with an oily surface. vividly in APP (Figure 4(p)). The wireless monitoring tech- nology and accurate analysis capability enable the patch to 4.2. Fabrication of 3D Piezoelectric Mesostructures. Fabrica- be applied in the medical field promisingly. tion and transfer of 2D precursors followed the procedures for the 2D piezoelectric mesostructures described above. 3. Conclusion After obtaining the 2D precursor, prepare the rebound medium VHB tape, cover the tape with an adhesive barrier We present a stretchable bioelectronic patch that can nonin- layer (PET, 50 μm in thickness), cut the adhesive barrier layer vasively monitor our bodies’ tendons in real time. Multiform on the tape into the desired shape through laser molding structures of piezoelectric polymers are designed, manufac- technology, and remove the excess part. This process requires tured, and compared. On the basis of structural optimization, a new definition of the focal length, cutting power, and

10 Research cutting rate of the laser-cutting machine. A custom mechan- Authors’ Contributions ical device is used to achieve an equally spaced stretching of the tape. The 2D precursors are then transferred to the Sheng Shu, Jie An, and Pengfei Chen contributed equally to stretched tape and connected by contact with a sticky surface. this work. Finally, release the prestrain and transform the 2D precur- sors into 3D mesostructures. Acknowledgments The research was supported by the National Key R&D 4.3. Fabrication of the Flexible Electrode. The electrodes of the Project from the Minister of Science and Technology flexible bioelectric patch are prepared by using inkjet printing (2016YFA0202704); Youth Innovation Promotion Associ- technology. Sputtering a copper film (50 nm) on a polyimide ation CAS, Beijing Municipal Science & Technology (PI) substrate (100 μm in thickness), using an inkjet printer Commission (Z171100000317001, Z171100002017017, and (Resist-Marking Printer Model SRP-3021) to print the Y3993113DF); and National Natural Science Foundation of desired electrode structure on the copper film, dissolving China (Grant Nos. 51605033, 51432005, 5151101243, and the copper without ink cover in ferric chloride solution, 51561145021). and then using another ink to wash off the printed ink, the resulting PI film is coated with graphical copper as the flexi- ble electrode. Supplementary Materials Supplementary 1. Supplementary note 1: detailed fabrication 4.4. Electrical Output Measurement. The voltage signal of the procedures for a representative 3D piezoelectric microsys- multiform epidermal musculotendinous bioelectronic patch tem. Supplementary note 2: introduction to finite element was acquired by a voltage preamplifier (Keithley 6517 System analysis (FEA). Supplementary note 3: fundamental studies Electrometer). The signal is generated by the patch in series of the open-circuit voltage. Supplementary note 4: calcula- between the linear motor (Linmot, E1100) and the commer- tion of Achilles tendon (AT) force. Supplementary note 5: cial stress sensor (Adbal, SH-5/10); signals from commercial the auxiliary in in vitro physical property sensing. Table S1: sensors are directly read out after being processed internally. comparison with existing wearable strain sensors. Figure S1: The whole measurement process of the system is fixed on the illustration of serpentine structure and its voltage output. optical platform. The high-precision commercial sensor (a) Optical imaging of our sensing unit on index figure. (b) (Oruda, AT8301) used in series with the patch at biceps bra- Open-circuit voltage under 20% stretching of the unit in chii determines the force by its own analog signal output S1a. Figure S2: fabrication scheme for 3D piezoelectric using the built-in program. The MCU is the core of the whole mesostructure. Figure S3: 3D fractal designs. (a–c) Optical wireless technology. It collects the charge quantity through imaging of various fractal manufactures, including first- (a) the front circuit and converts it into voltage. After the and second-order (b) fractal curves and a (c) Hilbert geome- digital-to-analog converter, the analog voltage amount is try. Scale bar, 2 mm. Figure S4: 3D precursor of the structures converted into a digital signal, which is then analyzed and shown in Figure 1. (a) Flower; (b) wave; (c) spring; (d) flake; processed by the low power Bluetooth module (TEXAS, (e–g) 3D precursor of the fractal structures, first order (e), CC2640R2F). These processes include calibration of voltage, second orders (f), and Hilbert geometry (g). Figure S5: FEA zero return of initial value, and analysis of the amount of predictions of 3D structures. (a–c) FEA prediction of the motion. Finally, the Bluetooth module transmits the data to buckled shape for the structures in Figure 1(b), including the APP for real-time display. Considering the influence of flower (a), wave (b), spring (c), and flake (d). (g–i) FEA pre- age, height, body fat rate, etc., the correction coefficient k is diction of the buckled shape for the fractal structures, first introduced in the APP, which is a constant determined by order (e), second orders (f), and Hilbert geometry (g). Figure the experiment to reduce the error. S6: FEA results. (a–c) FEA of the 3D structures in Figure 1(b), including flower (a), spring (b), and flake (c). (d, e) FEA of the fractal structures with first order (d) and Hilbert geome- Data Availability try (e). (f) Comparison of three types of fractal structure. Figure S7: FEA of the 2D structures in Figure 1(c). (a) Zigzag; All data needed to evaluate the conclusions in the paper are (b) rhomb; (c) net. Figure S8: FEA of the serpentine structure present in the paper and/or the Supplementary Information. with silicone rubber substrate. (a) Strain distribution; (b) sur- Additional data related to this paper may be requested from face charge distribution; (c) FEA results; (d) experiment the authors upon reasonable request. results. Figure S9: illustration of different width structural design. Figure S10: linear output graph with different width Conflicts of Interest structure. Figure S11: illustration of different radius struc- tural design in Figure 2(g). Figure S12: linear output graph All authors have declared that (i) no support, financial or with different radius in Figure 2(g). Figure S13: FEA results otherwise, has been received from any organization that of different angles in Figure 2(g). (a–e) Surface potential may have an interest in the submitted work and (ii) there is distribution of various radii, including 3 mm (a), 4 mm (b), no other commercial or associative interest that represents 5 mm (c), 6 mm (d), and 7 mm (e). (f) Comparison of surface a conflict of interest in connection with the work submitted. potential changes with load at different radii. Figure S14:
Research 11 illustration of different angle structural design in Figure 2(h). References Figure S15: linear output graph with different angles in Figure 2(h). Figure S16: FEA results of different angles in [1] E. Sebbag, R. Felten, F. Sagez, J. Sibilia, H. Devilliers, and Figure 2(h). (a–e) Surface potential distribution of various L. Arnaud, “The world-wide burden of musculoskeletal dis- angles, including 150° (a), 180° (b), 210° (c), 240° (d), and eases: a systematic analysis of the World Health Organization Burden of Diseases Database,” Annals of the Rheumatic Dis- 270° (e). (f) Comparison of surface potential changes with eases, vol. 78, no. 6, pp. 844–848, 2019. load at different angles. Figure S17: quantitative mechanized measurement method of the patch. Figure S18: variation of [2] G. Yang, B. B. Rothrauff, and R. S. Tuan, “Tendon and liga- ment regeneration and repair: clinical relevance and develop- open-circuit voltage with load under different thickness. (a– mental paradigm,” Birth Defects Research Part C, Embryo c) Linear output graph with different thickness structure, Today, vol. 99, no. 3, pp. 203–222, 2013. including 28 μm (a), 52 μm (b), and 110 μm (c). (d) Compar- [3] C. M. Boutry, Y. Kaizawa, B. C. Schroeder et al., “A stretchable ison of open-circuit voltage changes with load at different and biodegradable strain and pressure sensor for orthopaedic thickness. Figure S19: illustration of different numbers of application,” Nature Electronics, vol. 1, no. 5, pp. 314–321, the arc structural design in Figure 2(i). Figure S20: linear out- 2018. put graph with different numbers of the arc structure in [4] S. Bogaerts, H. Desmet, P. Slagmolen, and K. Peers, “Strain Figure 2(i). Figure S21: illustration of different numbers of mapping in the Achilles tendon - a systematic review,” Journal the units’ structural design in Figure 2(j). Figure S22: linear of Biomechanics, vol. 49, no. 9, pp. 1411–1419, 2016. output graph with different numbers of the unit in [5] B. C. Fleming and B. D. Beynnon, “In vivo measurement of Figure 2(j). Figure S23: relationship of radius and angle vs. ligament/tendon strains and forces: a review,” Annals of Bio- strain to illustrate the stretchability of the structures in medical Engineering, vol. 32, no. 3, pp. 318–328, 2004. Figure 2. Figure S24: comparison of open-circuit voltages at [6] P. V. Komi, “Relevance of in vivo force measurements to various speeds. Figure S25: simulation diagram of frequency human biomechanics,” Journal of Biomechanics, vol. 23, response characteristics under 1 N force. (a) Schematic dia- pp. 23–34, 1990. gram of force action. (b) Low frequency output under 1 N [7] S. F. Pichorim and P. J. Abatti, “Biotelemetric passive sensor force. (c) Voltage vs. frequency graph. Figure S26: compari- injected within tendon for strain and elasticity measurement,” son chart of stretch and resilience performance. (a) Sche- IEEE Transactions on Biomedical Engineering, vol. 53, no. 5, matic of stretching. (b) Comparison of potential difference pp. 921–925, 2006. between stretch and rebound under various forces. Figure [8] S. Patel, H. Park, P. Bonato, L. Chan, and M. Rodgers, “A S27: cyclic measurement of the device under 20% of the ten- review of wearable sensors and systems with application in sile. Figure S28: comparison of open-circuit voltage between rehabilitation,” Journal of Neuroengineering and Rehabilita- stretch and bending. (a) Schematic of bending. (b) Output tion, vol. 9, pp. 1–17, 2012. comparison under 20% tension and compression; the red [9] Y. Ding, M. Kim, S. Kuindersma, and C. J. Walsh, “Human-in- enlarged image shows the open-circuit voltage of the patch the-loop optimization of hip assistance with a soft exosuit dur- at 20% compression. Figure S29: diagram of the patch and ing walking,” Science Robotics, vol. 3, no. 15, article eaar5438, commercial sensors in series. (a) Illustration of the connec- 2018. tion between the patch and commercial sensors. (b) The [10] K. Dong, X. Peng, and Z. L. Wang, “Fiber/fabric-based piezo- patch and commercial sensors are fixed on the biceps for tan- electric and triboelectric nanogenerators for flexible/stretch- dem measurement. Figure S30: open-circuit voltage of the able and wearable electronics and artificial intelligence,” patch sticking to the deltoid (a), quadriceps femoris (b), ante- Advanced Materials, vol. 32, article e1902549, 2020. rior knee ligament (c), and hamstrings (d). Figure S31: APP [11] T. Luczak, R. F. Burch V, B. K. Smith et al., “Closing the wear- interface that can provide feedback information. Figure S32: able gap—part V: development of a pressure-sensitive sock utilizing soft sensors,” Sensors, vol. 20, p. 208, 2020. simulation of paretic gait. (a) Diagram of gait simulation method. (b, c) APP screenshot of paretic gait monitoring. [12] Y. Mengüç, Y.-L. Park, E. Martinez-Villalpando et al., “Soft wearable motion sensing suit for lower limb biome- Supplementary 2. Movie S1: FEA of surface stress and poten- chanics measurements,” in 2013 IEEE International Confer- tial distribution. ence on Robotics and Automation, pp. 5309–5316, Karlsruhe, Germany, 2013. Supplementary 3. Movie S2: sternocleidomastoid muscle test [13] Z. Wang, J. An, J. Nie et al., “A self-powered angle sensor at by second swing head. nanoradian-resolution for robotic arms and personalized Supplementary 4. Movie S3: bending the arm under different medicare,” Advanced Materials, vol. 32, article 2001466, 2020. frequency. [14] Z. Zhou, K. Chen, X. Li et al., “Sign-to-speech translation using machine-learning-assisted stretchable sensor arrays,” Nature Supplementary 5. Movie S4: different striking back signals for Electronics, vol. 3, no. 9, pp. 571–578, 2020. deep high service. [15] N. Bolus, H. K. Jeong, B. M. Blaho, M. Safaei, A. J. Young, and Supplementary 6. Movie S5: continuous motion measure- O. T. Inan, “Fit to burst: toward noninvasive estimation of ment of various sports. Achilles tendon load using burst vibrations,” IEEE Transactions on Biomedical Engineering, vol. 68, no. 2, pp. 470–481, 2021. Supplementary 7. Movie S6: Achilles’ tendon tests of daily activities. [16] J. A. Martin, S. C. E. Brandon, E. M. Keuler et al., “Gauging force by tapping tendons,” Nature Communications, vol. 9, Supplementary 8. Movie S7: gait analysis. no. 1, p. 1592, 2018.
12 Research [17] S. E. Harper, R. A. Roembke, J. D. Zunker, D. G. Thelen, and [35] S. Babaee, S. Pajovic, A. Rafsanjani, Y. Shi, K. Bertoldi, and P. G. Adamczyk, “Wearable tendon kinetics,” Sensors, G. Traverso, “Bioinspired kirigami metasurfaces as assistive vol. 20, no. 17, article 4805, 2020. shoe grips,” Nature Biomedical Engineering, vol. 4, no. 8, [18] S. Khan, S. Ali, and A. Bermak, “Recent developments in print- pp. 778–786, 2020. ing flexible and wearable sensing electronics for healthcare [36] Y. Sun, W. M. Choi, H. Jiang, Y. Y. Huang, and J. A. Rogers, applications,” Sensors, vol. 19, article 1230, 2019. “Controlled buckling of semiconductor nanoribbons for [19] J. Kim, A. S. Campbell, B. E.-F. de Ávila, and J. Wang, “Wear- stretchable electronics,” Nature Nanotechnology, vol. 1, no. 3, able biosensors for healthcare monitoring,” Nature Biotechnol- pp. 201–207, 2006. ogy, vol. 37, no. 4, pp. 389–406, 2019. [37] Y. Liu, X. Wang, Y. Xu et al., “Harnessing the interface [20] K. Sim, F. Ershad, Y. Zhang et al., “An epicardial bioelectronic mechanics of hard films and soft substrates for 3D assembly patch made from soft rubbery materials and capable of spatio- by controlled buckling,” Proceedings of the National Academy temporal mapping of electrophysiological activity,” Nature of Sciences of the United States of America, vol. 116, no. 31, Electronics, vol. 3, no. 12, pp. 775–784, 2020. pp. 15368–15377, 2019. [21] H. U. Chung, A. Y. Rwei, A. Hourlier-Fargette et al., “Skin- [38] T. R. Ray, J. Choi, A. J. Bandodkar et al., “Bio-integrated wear- interfaced biosensors for advanced wireless physiological able systems: a comprehensive review,” Chemical Reviews, monitoring in neonatal and pediatric intensive-care units,” vol. 119, no. 8, pp. 5461–5533, 2019. Nature Medicine, vol. 26, no. 3, pp. 418–429, 2020. [39] H. Zhao, K. Li, M. Han et al., “Buckling and twisting of [22] C. M. Boutry, L. Beker, Y. Kaizawa et al., “Biodegradable and advanced materials into morphable 3D mesostructures,” Pro- flexible arterial-pulse sensor for the wireless monitoring of ceedings of the National Academy of Sciences of the United blood flow,” Nature Biomedical Engineering, vol. 3, no. 1, States of America, vol. 116, no. 27, pp. 13239–13248, 2019. pp. 47–57, 2019. [40] J. A. Fan, W. H. Yeo, Y. Su et al., “Fractal design concepts for [23] C. Wang, X. Li, H. Hu et al., “Monitoring of the central blood stretchable electronics,” Nature Communications, vol. 5, pressure waveform via a conformal ultrasonic device,” Nature no. 1, p. 3266, 2014. Biomedical Engineering, vol. 2, no. 9, pp. 687–695, 2018. [41] J. Hartvigsen, M. J. Hancock, A. Kongsted et al., “What low [24] Y. Yang, Y. Song, X. Bo et al., “A laser-engraved wearable sen- back pain is and why we need to pay attention,” The Lancet, sor for sensitive detection of uric acid and tyrosine in sweat,” vol. 391, no. 10137, pp. 2356–2367, 2018. Nature Biotechnology, vol. 38, no. 2, pp. 217–224, 2020. [42] C. V. Andreoli, B. C. Chiaramonti, E. Biruel, A. . C. Pochini, [25] Y. Yu, J. Nassar, C. Xu et al., “Biofuel-powered soft electronic B. Ejnisman, and M. Cohen, “Epidemiology of sports injuries skin with multiplexed and wireless sensing for human- in basketball: integrative systematic review,” BMJ Open Sport machine interfaces,” Science Robotics, vol. 5, no. 41, article & Exercise Medicine, vol. 4, no. 1, article e000468, 2018. eaaz7946, 2020. [43] V. L. Giddings, G. S. Beaupre, R. T. Whalen, and D. R. Carter, [26] M. Mercuri, I. R. Lorato, Y. H. Liu, F. Wieringa, C. V. Hoof, “Calcaneal loading during walking and running,” Medicine & and T. Torfs, “Vital-sign monitoring and spatial tracking of Science in Sports & Exercise, vol. 32, no. 3, pp. 627–634, 2000. multiple people using a contactless radar-based sensor,” Nature Electronics, vol. 2, no. 6, pp. 252–262, 2019. [44] G. D. McKay, P. Goldie, W. R. Payne, and B. Oakes, “Ankle injuries in basketball: injury rate and risk factors,” British Jour- [27] S. Han, J. Kim, S. M. Won et al., “Battery-free, wireless sensors nal of Sports Medicine, vol. 35, no. 2, pp. 103–108, 2001. for full-body pressure and temperature mapping,” Science Translational Medicine, vol. 10, article eaan4950, 2018. [45] L. Ebadi and M. Günay, “Analysing of the types of injuries observed in table tennis players according to the some vari- [28] Y. H. Jung, S. K. Hong, H. S. Wang et al., “Flexible piezoelectric ables,” IOSR Journal of Sports and Physical Education (IOSR- acoustic sensors and machine learning for speech processing,” JSPE), vol. 5, no. 4, pp. 21–26, 2018. Advanced Materials, vol. 32, article 1904020, 2019. [46] D. T. P. Fong, Y.-Y. Chan, K.-M. Mok, P. S. H. Yung, and [29] W. Zhong Lin, “Piezoelectric nanogenerators based on zinc K.-M. Chan, “Understanding acute ankle ligamentous sprain oxide nanowire arrays,” Science, vol. 312, no. 5771, pp. 242– injury in sports,” BMC Sports Science, Medicine and Rehabi- 246, 2006. litationSports Medicine, Arthroscopy, Rehabilitation, Therapy [30] Z. L. Wang, “On Maxwell's displacement current for energy & Technology: SMARTT, vol. 1, 2009. and sensors: the origin of nanogenerators,” Materials Today, vol. 20, no. 2, pp. 74–82, 2017. [31] C. R. Bowen, H. A. Kim, P. M. Weaver, and S. Dunn, “Piezo- electric and ferroelectric materials and structures for energy harvesting applications,” Energy & Environmental Science, vol. 7, no. 1, pp. 25–44, 2014. [32] M. Han, H. Wang, Y. Yang et al., “Three-dimensional piezo- electric polymer microsystems for vibrational energy harvest- ing, robotic interfaces and biomedical implants,” Nature Electronics, vol. 2, no. 1, pp. 26–35, 2019. [33] E. Song, J. Li, S. M. Won, W. Bai, and J. A. Rogers, “Materials for flexible bioelectronic systems as chronic neural interfaces,” Nature Materials, vol. 19, no. 6, pp. 590–603, 2020. [34] S.-M. Baek, S. Yim, S.-H. Chae, D.-Y. Lee, and K.-J. Cho, “Ladybird beetle–inspired compliant origami,” Science Robot- ics, vol. 5, no. 41, article eaaz6262, 2020.
You can also read