Measurement Method for Nonlinearity in Heterodyne Laser Interferometers Based on Double-Channel Quadrature Demodulation - MDPI
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
sensors
Article
Measurement Method for Nonlinearity in Heterodyne
Laser Interferometers Based on Double-Channel
Quadrature Demodulation
Haijin Fu † , Ruidong Ji † , Pengcheng Hu * ID
, Yue Wang, Guolong Wu and Jiubin Tan
Institute of Ultra-Precision Optoelectronic Instrument Engineering, Harbin Institute of Technology,
Harbin 150001, China; haijinfu@hit.edu.cn (H.F.); safeup@163.com (R.J.); wy206@stu.hit.edu.cn (Y.W.);
garywu@hit.edu.cn (G.W.); jbtan@hit.edu.cn (J.T.)
* Correspondence: hupc@hit.edu.cn; Tel.: +86-451-8641-2041 (ext. 803)
† These authors contribute equally to this study.
Received: 19 July 2018; Accepted: 21 August 2018; Published: 22 August 2018
Abstract: The phase quadrature measurement method is capable of measuring nonlinearity in
heterodyne laser interferometers with picometer accuracy whereas it cannot be applied in the new kind
of heterodyne interferometers with bidirectional Doppler frequency shift especially in the condition of
non-uniform motion of the target. To solve this problem, a novel measurement method of nonlinearity
is proposed in this paper. By employing double-channel quadrature demodulation and substituting
the external reference signal with internal ones, this method is free from the type of heterodyne laser
interferometer and the motion state of the target. For phase demodulation, the phase differential
algorithm is utilized to improve the computing efficiency. Experimental verification is carried out and
the results indicate that the proposed measurement method achieves accuracy better than 2 pm.
Keywords: laser interferometry; heterodyne laser interferometer; nonlinearity measurement;
double-channel quadrature demodulation
1. Introduction
Heterodyne laser interferometers are widely applied in precision metrology, nanotechnology,
and lithography due to their high accuracy and robustness [1–3]. With the development of science
and technology, it is badly in need of laser interferometers with picometer accuracy [4] such as
the next-generation laser interferometers. However, the improvement of the measurement accuracy
of heterodyne laser interferometers is seriously restricted by the nonlinearity [5–7], i.e., the periodic
nonlinear error. The measurement method of nonlinearity as an indispensable auxiliary tool plays
an essential role in developing the next-generation laser interferometers.
Several methods for measuring the nonlinearity of heterodyne laser interferometers have been
developed [8–10]. The most widely used method is the frequency domain method [8]. This method
is simple and convenient to operate, but it is only applicable to the cases with constant velocity.
Moreover, limited by the background noise of the spectrometer, picometer accuracy is not available for
this method. Another method is the displacement comparison method [9] when compared to an identical
displacement. By subtracting the result of an X-ray interferometer from that of a laser interferometer,
the nonlinearity can be obtained. Picometer accuracy is easily achieved by this method while the X-ray
interferometer is difficult to be replicated due to technique and cost issues and the measurement
process is complex because of the special property of X-rays. Benefited from lock-in amplification,
the phase quadrature measurement method [10] is promising in a nonlinearity measurement up to
picometer accuracy. In this method, the reference signal of the interferometer serves as the external
Sensors 2018, 18, 2768; doi:10.3390/s18092768 www.mdpi.com/journal/sensorsSensors 2018, 18, 2768 2 of 9
reference signal of a lock-in amplifier in which there is a phase-locked loop that tracks the frequency of
the external reference signal. Then a pair of quadrature signals with the same frequency are generated
internally for the phase demodulation. The frequency of the external reference signal is expected to
keep constant or to vary slowly. Otherwise, the phase-locked loop might work in the tracing state
rather than the locked state [11], which will cause an error for phase demodulation. For the traditional
heterodyne laser interferometers, the frequency of the reference signal is of constant frequency, i.e.,
the split frequency of the laser source, so there is no such problem. For the next generation heterodyne
laser interferometers [12,13], most of them adopt an optical configuration with bidirectional Doppler
frequency shift (DFS), i.e., the measurement and reference signals have equal DFS but come with
an opposite sign. When the target is in fast and non-uniform motion, the frequency of the reference signal
will change rapidly. In this case, the existing phase quadrature measurement method is not applicable.
This paper presents a novel measurement method for nonlinearity in heterodyne laser
interferometers, which adopts the architecture of double-channel quadrature demodulation with
internal references and, thereby, is able to break through the limits in type of heterodyne laser
interferometers and in motion state of the target. In addition, the phase differential algorithm is
utilized to improve the computing efficiency. Experiments are carried out to verify the performance of
the proposed method.
2. Measurement Method for Nonlinearity Based on Double-Channel Quadrature Demodulation
The nonlinearity in heterodyne laser interferometers originates from the frequency mixing in
the reference and measurement arms [14–16]. In recent years, to avoid the nonlinearity, heterodyne
interferometers with spatially separated optical paths have been developed [12,13]. In this kind of
interferometers, the reference and measurement beams with slightly different frequencies are separated
spatially before interference. In theory, there is no frequency mixing and, thereby, the nonlinearity
can be completely avoided. However, an experimental study reveals that there is still nonlinearity
in this kind of interferometer and its source is ascribed to the multi-order DFS induced by ghost
reflection [17,18], i.e., the laser beams are repeatedly reflected between the beam splitter and the target.
To improve the resolution by a factor of two, this kind of heterodyne laser interferometer usually adopts
an optical layout with bidirectional DFS. Figure 1 shows the schematic of the formation mechanism of
the reference and measurement signals in this type of interferometer. Considering the multi-order DFS,
the reference and measurement signals can be expressed by the equation below.
Ir = A cos(∆ωt − ∆ϕ ) + α1 cos(∆ωt − 2∆ϕ) + α2 cos(∆ωt − 3∆ϕ) + . . .
= A cos(∆ωt − ∆ϕ) + ∑ αm cos(∆ωt + θm )
m (1)
Im = B cos(∆ωt + ∆ϕ) + β 1 cos(∆ωt + 2∆ϕ) + β 2 cos(∆ωt + 3∆ϕ) + . . .
= B cos(∆ωt + ∆ϕ) + ∑ β n cos(∆ωt + δn ),
n
where A and B are the amplitudes of the intended reference and measurement signals,
respectively. αm (m = 1, 2, 3, . . .) and β n (n = 1, 2, 3, . . .) are the amplitudes of the mth and
nth order nonlinear harmonics in the reference and measurement signals, respectively, generally
αm (m = 1, 2, 3, . . .)
A and β n (n = 1, 2, 3, . . .)
B. ∆ω = 2π∆ f = 2π ( f 1 − f 2 )
is the beat frequency, f 1 and f 2 are the optical frequencies of the dual-frequency laser source.
θm = −(m + 1)∆ϕ and δn = (n + 1)∆ϕ. ∆ϕ is the measured phase and can be calculated by using
Equation (2). Z
∆ϕ = 2π f d dt, (2)
where f d is the DFS.Sensors2018,
Sensors 18,x2768
2018,18, FOR PEER REVIEW 33of
of99
Sensors 2018, 18, x FOR PEER REVIEW 3 of 9
...
... ...
DFS ...
MA1 DFS ... f1+fd
MA1 ... ff11+f
+2fd d
f1 BS f1+2f...d
f1 BS f1... d
+mf
RA1 f1 f1+mfd
RA1 f1 Reference
Reference Δf-fd
signal
INF INF ΔΔf-f
f-2f
d d
signal
... INF INF ...d
Δf-2f
... Δ.. . d
f-mf
... f2+fd Δf-mfd
... ... ff22+f
+2fd d Measurement
DFS ... ... d Measurement Δf+fd
f2+2f signal
MA2 DFS ... f.. . d ΔΔf+f
f+2f
2+nf
d d
signal
MA2 ... f2+nfd ...d
Δf+2f
f2 BS Δ.. . d
f+nf
f2 BS Δf+nfd
RA2 f2
RA2 f2
Figure 1. Schematic of formation mechanism of the reference and measurement signals in heterodyne
Schematicofofformation
Figure1.1.Schematic
Figure formationmechanism
mechanismofofthe
thereference
referenceand
andmeasurement
measurementsignals
signalsininheterodyne
heterodyne
laser interferometers with spatially separated optical paths and bidirectional DFS. BS: beam splitter,
laser interferometers with spatially separated optical paths and bidirectional DFS. BS: beam
laser interferometers with spatially separated optical paths and bidirectional DFS. BS: beam splitter, splitter,
MA: measurement arm, RA: reference arm, DFS: Doppler frequency shift, INF: interference.
MA:measurement
MA: measurementarm,
arm,RA: RA:reference
referencearm,
arm,DFS:
DFS:Doppler
Dopplerfrequency
frequencyshift,
shift,INF:
INF:interference.
interference.
As indicated by Equation (1), the reference and measurement signals for the new type
As
As indicated
indicated by Equation (1), the
the reference and
and measurement signals for the the new
newoftype
interferometer haveby Equation
equal DFS but (1),come reference
with an opposite measurement
sign. Therefore, signalstheforfrequency type
the
interferometer
interferometer have equal
equalDFS DFSbut butcomecome withwith
an an opposite
opposite sign. sign. Therefore,
Therefore, the the frequency
frequency of the of the
reference
reference signal is also determined by the motion state of the target. When the target is in non-uniform
reference signal
signal isthe is also determined
alsofrequency
determined by the by the state
motion motion the state of theWhen
target. When theistarget is in non-uniform
motion, of the reference signalof is nottarget.
constant. As the target
mentioned in non-uniform
above, in this case,motion,
the
motion,
the the frequency
frequency of the of the reference
reference signal signal
is not is not constant.
constant. As As mentioned
mentioned above, above,
in this in this
case, thecase, the
existing
existing phase quadrature measurement method is not applicable. To solve this problem, a novel
existing phase quadrature
phase quadrature measurement measurement
method is method is not applicable.
not applicable. To solve this Toproblem,
solve this problem,
a novel a novel
measurement
measurement method of nonlinearity based on a double-channel quadrature demodulation is
measurement
method of method ofbased
nonlinearity nonlinearity
on a based on a double-channel
double-channel quadrature quadratureis demodulation
demodulation presented, which is
presented, which is illustrated in Figure 2. This is realized in the field programmable gate array
presented, which
is illustrated is illustrated
in Figure in realized
Figure 2.inThis is realized in the field programmable gate array
(FPGA). Compared with2.theThis is
traditional phase the field
quadratureprogrammable
measurement gatemethod,
array (FPGA).
there are Compared
two key
(FPGA). Compared
with the traditional with the traditional phase quadrature measurement method, there are two key
distinctions. The first phase quadrature
distinction measurement
is that the method,isthere
traditional method based areontwo key distinctions.
a single lock-in amplifier The
distinctions.
first The first
distinction is distinction
that the is that method
traditional the traditional
is based method
on a is based
single on a amplifier
lock-in single lock-in while amplifier
the new
while the new method adopted two lock-in amplifiers (a lock-in amplifier mainly consists of two
while
method theadopted
new method adopted
two pass
lock-in two lock-in
amplifiers amplifiers
(a lock-in (a lock-in
amplifier amplifier mainly
of two consists of two
mixers and two low filters). The second distinction ismainly consists
that, in the traditional mixers
method,and two
the
mixers
low and
pass two
filters). low
The pass
second filters). The
distinction second
is that, distinction
in the is
traditional that, in
method,the traditional
the reference method,
signal ofthe
the
reference signal of the interferometer serves as the external reference of the lock-in amplifier while,
reference signal serves
interferometer of the asinterferometer
the external serves as of
reference thetheexternal
lock-in reference
amplifier ofwhile,
the lock-in
in the amplifier
new method,while,the
in the new method, the external reference signal is abandoned. Instead, a pair of quadrature signals
inexternal
the new method,signal
reference the external
is reference
abandoned. signala is
Instead, abandoned.
pair of quadrature Instead,
signalsa pair of quadrature
generated inside signals
the FPGA
generated inside the FPGA are used as the reference signals of the lock-in amplifiers and both the
generated
are used andinside
as the the FPGAsignals
reference are used as the
ofofthe reference signals ofboth
the lock-in amplifiers and both the
reference measurement signals thelock-in amplifiers
interferometer and
serve the reference
as the measurement and
signalsmeasurement
of the two
reference
signals and
of the measurement
interferometer signals
serve of the interferometer
as measurement serve asofthe
signals themeasurement
two amplifiers. signals of the two
amplifiers.
amplifiers.
Icos Isin
IΦ=0°
cos I
Φ=90°
sin
Φ=0° Φ=90°
Im sinH sinQsinH
Im sinH sinQsinH
C
C
cosH cosQcosH
cosH cosQcosH
δϕ ( t )
Ir sinQ sinQcosH δϕ ( t )
Ir sinQ sinQcosH
S
S
cosQ cosQsinH
cosQ cosQsinH
Low Pass
Orthogonal mixing Low Pass
Filter Phase differencing
Orthogonal mixing Filter Phase differencing
Schematicof
Figure2.2.Schematic
Figure ofthe
themeasurement
measurementmethod
methodfor
fornonlinearity
nonlinearityin
inheterodyne
heterodynelaser
laserinterferometers
interferometers
Figure 2.
onSchematic
basedon of the measurement method for nonlinearity in heterodyne laser interferometers
based aadouble-channel
double-channel quadrature demodulation.
quadrature demodulation.
based on a double-channel quadrature demodulation.Sensors 2018, 18, 2768 4 of 9
The two quadrature signals generated inside the FPGA can be expressed as Icos = cosω 0 t and
Isin = sinω 0 t where ω0 is the angular frequency. As shown in Figure 2, in the first step, the internally
generated quadrature signals are mixed with reference and measurement signals of the heterodyne
interferometer, respectively. This operation is performed by four mixers. After low pass filtering, the
output of the mixers can be expressed by the equation below.
∑ αm
sin Q = − A
sin(∆ωt − ∆ϕ − ω0 t) − m
sin(∆ωt + θm − ω0 t)
2 2
∑ αm
A
cos(∆ωt − ∆ϕ − ω0 t) + 2 cos( ∆ωt + θm − ω0 t )
m
cos Q = 2
∑ βn (3)
sin H = − B
sin(∆ωt + ∆ϕ − ω0 t) − n
2 sin( ∆ωt + δn − ω0 t )
2
∑ βn
B
cos(∆ωt + ∆ϕ − ω0 t) + n
cos(∆ωt + δn − ω0 t).
cos H = 2 2
Based on Equation (3), the cosine component C(t) and sine component S(t) can be calculated using
the formula below.
C (t) = sin Q sin H + cos Q cos H
1 1
β n cos(∆ϕ + δn )
= 4 AB cos(2∆ϕ) + 4 A∑
n
+ 4 B∑ αm cos(∆ϕ − θn ) + 14 ∑ αm ∑ β n cos(δn − θm )
1
m m n (4)
S ( t ) = cos H sin Q − sin H cos Q
= 41 AB sin(2∆ϕ) + 14 A∑ β n sin(∆ϕ + δn )
n
+ 41 B∑ αm sin(∆ϕ − θm ) + 14 ∑ αm ∑ β n sin(δn − θm ),
m m n
then the amplitude and phase can be calculated using Equations (5) and (6).
q
R(t) = C ( t ) 2 + S ( t )2
= 41 {[ AB cos(2∆ϕ) + A∑ β n cos(∆ϕ + δn )
n
+ B∑ αm cos(∆ϕ − θm ) + ∑ αm ∑ β n cos(δn − θm )]2 (5)
m m n
+[ AB sin(2∆ϕ) + A∑ β n sin(∆ϕ + δn )
n
1
+ B∑ αm sin(∆ϕ − θm ) + ∑ αm ∑ β n sin(δn − θm )]2 } 2 ,
m m n
and h i
S(t)
Φ(t) = arctan C (t)
AB sin(2∆ϕ)+ A∑ β n sin(∆ϕ+δn )+ B∑ αm sin(∆ϕ−θm )+∑ αm ∑ β n sin(δn −θm ) (6)
= arctan AB cos(2∆ϕ)+ A∑n β n cos(∆ϕ+δn )+ B∑
m m n
αm cos(∆ϕ−θm )+∑ αm ∑ β n cos(δn −θm )
.
n m m n
As the reference and measurement signals, Im and Ir have equal but opposite DFS. The theoretical
phase difference between them is 2∆ϕ. Therefore, the measurement error of phase is shown below.
δϕ(t) = Φ(t) − 2∆ϕ. (7)
By using the first order approximation of the Taylor expansion for Equation (6), Equation (7) is
expressed by the formula below.
1 1
δϕ(t) ≈
Am∑ αm sin(−θm − ∆ϕ) + ∑ β n sin(δn − ∆ϕ).
B n
(8)Sensors 2018, 18, 2768 5 of 9
Similarly, δR(t)/R(t) can be expressed by the equation below.
δR(t) R ( t ) − R0 1 1
= ≈ ∑ αm cos(−θm − ∆ϕ) + ∑ β n cos(δn − ∆ϕ), (9)
R(t) R(t) Am B n
where R0 is the amplitude when αm = βn = 0 (m, n = 1, 2, 3, . . .). Equations (8) and (9) are similar
in mathematical expressions except for a 90◦ phase delay. Thus, in real applications, to evaluate
the nonlinearity, we can calculate δR(t)/R(t) rather than δϕ(t) since the calculation of δR(t)/R(t) are
much easier to realize in practical applications. As shown by Equation (7), to calculate the phase error
δϕ(t), it is necessary to know the real phase 2∆ϕ. However, this is not easy to realize in practical
applications because it is extremely difficult to provide a controlled displacement at nanometer or
sub-nanometer level. Actually, in most of the practical applications, the real phase is an unknown value.
However, for calculating δR(t)/R(t), it is not necessary to know the real phase. To evaluate the system
nonlinearity, the phase delay is a negligible factor. Therefore, the nonlinearity can be calculated by the
equation below.
1 λ 1 λ δR(t)
δLnonlin = δϕ(t) = , (10)
M 2π M 2π R(t)
where M is the optical fold factor and λ is the laser wavelength for the heterodyne laser interferometers
with bidirectional DFS, M = 4. For digital signals, δR(t)/R(t) can be calculated by the formula below.
δR(t) R(n) − R
= , (11)
R(t) R
where
1 N
N n∑
R = R ( n ). (12)
=1
The above analysis shows the overall procedure of the proposed method for measuring the
nonlinearity in heterodyne laser interferometers. By adopting internal references for the lock-in
amplifiers, this method avoids the problems induced by frequency variation of external references,
which means it is no longer limited by the motion state of the target. By utilizing double-channel
quadrature demodulation, the method can be applied extensively to the new type heterodyne laser
interferometers with bidirectional DFS. In addition, for phase demodulation, it is not a simple
subtraction of the measured phases of the two lock-in amplifiers. Instead, the phase differential
algorithm is employed to improve computing efficiency.
3. Experiment Validation
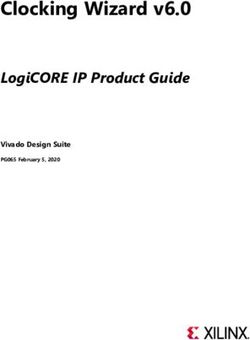
To verify the proposed method, an experimental setup was established, which is shown in
Figure 3, where the waveform generator (Tektronix, AWG5012C, Beaverton, OR, USA) is used
to generate two signals that simulate the reference and measurement signals of the heterodyne
laser interferometers. The measurement of the nonlinearity is performed by the measuring circuit
in which the two signals from the waveform generator are first converted into digital signals by
the analog-to-digital converters (ADC) (AD9446, Analog Devices, Norwood, MA, USA) and then are
processed in the FPGA (EP3C120F780C8, Altera Corporation, Santa Clara, CA, USA). The method
described in Section 2 is realized in the FPGA and the results are sent to the personal computer through
a Universal Serial Bus (USB).Sensors 2018, 18, x FOR PEER REVIEW 6 of 9
digital converters (ADC) (AD9446, Analog Devices, Norwood, MA, USA) and then are processed in
the FPGA (EP3C120F780C8, Altera Corporation, Santa Clara, CA, USA). The method described in
Section
Sensors 2 is
2018, 18, realized
2768 in the FPGA and the results are sent to the personal computer through
6 of a
9
Universal Serial Bus (USB).
Figure 3. Experimental setup for validating the proposed measurement method of nonlinearity in
Figure 3. Experimental setup for validating the proposed measurement method of nonlinearity in
heterodyne laser interferometers. ADC, analog-to-digital converter, FPGA, Field-Programmable Gate
heterodyne laser interferometers. ADC, analog-to-digital converter, FPGA, Field-Programmable Gate
Array, USB, Universal Serial Bus.
Array, USB, Universal Serial Bus.
3.1. System Performance in Condition of Uniform Motion
3.1. System Performance in Condition of Uniform Motion
To study the performance of the measurement system when the target is in uniform motion, the
To study the performance of the measurement system when the target is in uniform motion,
waveform generator produced two simulated signals, which are shown below.
the waveform generator produced two simulated signals, which are shown below.
I r = A cos ( 2πΔft − Δϕ ) + α1 cos ( 2πΔf − 2Δϕ ) + α 2 cos(2πΔft − 3Δϕ )
A cos
(2π∆
t − ∆ϕ ) + α
Ir = fMRS 1 cos(2π∆ PRS1 f − 2∆ϕ ) + α2 cos (2π∆
PRS2
f t − 3∆ϕ)
(13)
( ) ( ) ( )
| {z } | {z } | {z }
I = B cos 2π Δ f + Δ ϕ + β cos 2π Δ f + 2 Δ ϕ + β cos 2π Δ f + 3 Δ ϕ .
m MRS
PRS 1 PRS 2
+ ∆ϕ) + β 1
1 2 . (13)
Im = B cos(2π∆ fMMS cos(2π∆ PMSf1 + 2∆ϕ ) + β 2 cos(PMS 2π∆ 2
f + 3∆ϕ)
| {z } | {z } | {z }
MMS PMS1 PMS2
In Equation (13), only the first-order and second-order nonlinear harmonics are retained because
the higher order(13),
In Equation nonlinear harmonics
only the first-orderare
andrelatively quitenonlinear
second-order small [12]. When the
harmonics aretarget moves
retained at a
because
constant velocity υ, the measured phase
the higher order nonlinear harmonics are Δϕrelatively quite small [12]. When the target moves at
is calculated by the equation below.
a constant velocity υ, the measured phase ∆ϕ is calculated by the equation below.
2υ 4πυ t
Δϕ = Z2π f d dt = 2π Z dt = , (14)
λ 2υ λ 4πυt
∆ϕ = 2π f d dt = 2π dt = , (14)
where λ = 632.8 nm. λ λ
where InλEquation
= 632.8 nm.(13), the reference signal Ir consists of the main reference signal (MRS) and the
parasitic reference(13),
In Equation signals (PRS1–2) and
the reference the Irfrequency
signal consists ofof the
MRS,mainPRSreference
1, and PRS 2 are(MRS)
signal Δf − andfd ,
Δf − 2 f d , and Δf − 3 f d , respectively. Similarly, the measurement signal Im consists of the main
the parasitic reference signals (PRS 1–2 ) and the frequency of MRS, PRS 1 , and PRS 2 are ∆ f − fd,
∆ f − 2 f d , and ∆ f − 3 f d , respectively. Similarly, the measurement signal Im consists of the main
measurement signal (MMS) and the parasitic measurement signals (PMS1–2) and the frequency of
measurement signal (MMS) and the parasitic measurement signals (PMS1–2 ) and the frequency of
MMS, PMS1, and PMS2 are ∆f + f , ∆f + 2f , and ∆f + 3f , respectively. In this experiment, the beat
MMS, PMS1 , and PMS2 are ∆ f + df d , ∆ f +d2 f d , and ∆ f d+ 3 f d , respectively. In this experiment, the
frequency
beat frequency∆f and∆ f the
and DFSthefdDFS
are set as 5 set
f d are MHz asand 0.5 MHz,
5 MHz and respectively. The equivalent
0.5 MHz, respectively. Thevelocity of the
equivalent
target is 0.1582
velocity of the m/s.
targetTheis ratio
0.1582between
m/s. The the amplitudes
ratio between of MRS, PRS1, and PRS
the amplitudes 2 is set as 10,000:6:2. For
of MRS, PRS1 , and PRS2 is
MMS, PMS 1, and PMS2, the ratio of the amplitudes is also set as 10,000:6:2. By substituting these
set as 10,000:6:2. For MMS, PMS1 , and PMS2 , the ratio of the amplitudes is also set as 10,000:6:2. By
values into Equations
substituting these values (9) into
and Equations
(10), the theoretical
(9) and (10),magnitudes for themagnitudes
the theoretical first-order for andthesecond-order
first-order
nonlinearities are calculated as 30.2 pm and 10 pm, respectively. Figure 4a,b
and second-order nonlinearities are calculated as 30.2 pm and 10 pm, respectively. Figure 4a,b show the corresponding
experimental
show results in time
the corresponding domain and frequency
experimental results in domain, respectively.
time domain The overall
and frequency nonlinearity
domain, shown
respectively.
in Figure 4a is the superposition of the first-order and second-order periodic errors.
The overall nonlinearity shown in Figure 4a is the superposition of the first-order and second-order By employing the
Fast Fourier Transform (FFT) to the data in Figure 4a, the frequencies and amplitudes
periodic errors. By employing the Fast Fourier Transform (FFT) to the data in Figure 4a, the frequencies and for the first-
amplitudes for the first-order and second-order nonlinearities can be determined. As shown in Figure 4b,
the frequency and amplitude for the first-order nonlinearity are 0.5 MHz and 28.42 pm, respectively.Sensors 2018, 18, x FOR PEER REVIEW 7 of 9
order2018,
Sensors and 18,
second-order
2768 nonlinearities can be determined. As shown in Figure 4b, the frequency7 and of 9
amplitude for the first-order nonlinearity are 0.5 MHz and 28.42 pm, respectively. For the second-
order nonlinearity, the frequency and amplitude are 1.0 MHz and 8.42 pm, respectively. Therefore,
For the second-order nonlinearity, the frequency and amplitude are 1.0 MHz and 8.42 pm, respectively.
in this case, the measurement errors for the first-order and second-order nonlinearities are 1.78 pm and
Therefore, in this case, the measurement errors for the first-order and second-order nonlinearities are 1.78
1.58 pm, respectively.
pm and 1.58 pm, respectively.
35
60 (a) (b)
30
40
25
Nonlinearity / pm
Amplitude / pm
20 20
15
0
10
-20 5
0
0 2 4 6 8 10 12 14 16 0.0 0.3 0.6 0.9 1.2 1.5 1.8
t / μs Frequency / MHz
Figure
Figure 4. Experimental
4. Experimental results
results of nonlinearities
of nonlinearities in condition
in condition of uniform of motion
uniform
withmotion with
∆f = 5 MHz,
∆f f ==0.5
5 MHz,
MHz, A:α =
f d 1 :α2 =0.5MHz,
B:β :β = A : :
10,000:6:2.
α1 α2 =
(a) B :
Time β : =
domain
1 2β 10,
and; 000
(b) : 6 : 2.
frequency (a) ime
domain. domain and;
d 1 2
(b) frequency domain.
3.2. System Performance in Condition of Non-Uniform Motion
3.2. System Performance in Condition of Non-Uniform Motion
To study the performance of the measurement system when the target is in non-uniform motion,
To study generator
the waveform the performance
produced of two
the simulated
measurement signals system when
identical to thatthe intarget
Equationis in (13).
non-uniform
When the
motion,
target movesthe waveform generator
with a constant produceda,two
acceleration thesimulated
measured signals Δϕ is calculated
phase identical to that inbyEquation
the equation(13).
below.the target moves with a constant acceleration a, the measured phase ∆ϕ is calculated by
When
the equation below.
2at 2πat 2
Δϕ = Z2π f d dt = 2π Z dt = . (15)
λ2at λ2πat2
∆ϕ = 2π f d dt = 2π dt = . (15)
λ λ
In this experiment, the beat frequency ∆f is set as 5 MHz and the target acceleration is set as
In this2. experiment,
5 m/s In the reference the signal
beat frequency
Ir, the ratio ∆ fbetween
is set asthe5 MHz and the
amplitudes of target
MRS, PRS acceleration is set as 5
1, and PRS2 is set as
m/s 2 . In the reference signal I , the ratio between the amplitudes of MRS, PRS , and PRS is set as
10,000:6:2. In the measurementr signal Im, the ratio between the amplitudes of MMS, 1 PMS1, 2and PMS2
10,000:6:2. In the measurement signal Im , the ratio between the amplitudes
is also set as 10,000:6:2. With these given values, the theoretical magnitudes of the first-order of MMS, PMS 1 , and PMS and2
issecond-order
also set as 10,000:6:2. With these given values, the theoretical magnitudes
nonlinearities can be calculated as 30.2 pm and 10 pm, respectively. Figure 5a shows of the first-order and
second-order
the measured nonlinearities can
nonlinearities in thebetime
calculated
domainaswith 30.2the
pmsampling
and 10 pm, times respectively. Figure5b–d
of 9.8 ms. Figure 5a shows
is the
the measured nonlinearities in the time domain with the sampling
partial enlarged drawings of the beginning, middle, and end parts of Figure 5a. The time length times of 9.8 ms. Figure 5b–d is of
the partial enlarged drawings of the beginning, middle, and end parts
each part is 0.08 ms. It can be seen that, with the increase of time, the period of the measured of Figure 5a. The time length
of each part is
nonlinearity 0.08 ms. which
decreases, It can indicates
be seen that, with the increase
an accelerated motion of time,
of the the period
target. Since the of the
timemeasured
length in
nonlinearity
Figure 5b–d is very short, the target velocity in each panel can be considered constant. Bylength
decreases, which indicates an accelerated motion of the target. Since the time applying in
Figure 5b–d is very short, the target velocity in each panel can be considered
the FFT to the data in Figure 5b–d, the first-order and second-order nonlinearities can obtained, which constant. By applying the
FFT to the dataininFigure
are presented Figure5e–g,
5b–d,respectively.
the first-order Theand second-order
frequencies of thenonlinearities can obtained,
first-order nonlinearity which5e–g
in Figure are
presented in Figure 5e–g, respectively. The frequencies of the first-order nonlinearity
are 0.035 MHz, 0.170 MHz, and 0.305 MHz, respectively, and the corresponding amplitudes are 28.50 pm, in Figure 5e–g are
0.035
28.61MHz, pm, and0.17028.57
MHz, and
pm, 0.305 MHz, Similarly,
respectively. respectively, theand the corresponding
frequencies amplitudesnonlinearity
of the second-order are 28.50 pm, in
28.61 pm, and 28.57 pm, respectively. Similarly, the frequencies of the
Figure 5e–g are 0.070 MHz, 0.340 MHz, and 0.610 MHz, respectively, and the corresponding amplitudes second-order nonlinearity in
Figure
are 11.61 5e–g
pm, are8.35
0.070
pm,MHz,
and 0.340 MHz,
8.39 pm, and 0.610 MHz,
respectively. Both respectively,
the first-order and and thesecond-order
corresponding amplitudes
nonlinearities
are 11.61 pm,
calculated 8.35the
from pm,above-mentioned
and 8.39 pm, respectively.
three parts Both aretheclose
first-order
to the and second-order
theoretical valuesnonlinearities
and the max
calculated from the above-mentioned three parts are close to the
measurement error is about 1.7 pm, which indicates a good reliability of the proposed method. theoretical values and the max
measurement error is about 1.7 pm, which indicates a good reliability of the proposed method.Sensors 2018, 18, 2768
x FOR PEER REVIEW 8 of 9
(a)
60
40
Nonlinearity / pm
20
0
-20
-40
2.5 3.0 3.5 4.0 4.5 5.0 5.5 6.0 6.5 7.0 7.5 8.0 8.5 9.0 9.5 10.0 10.5 11.0 11.5 12.0
t / ms
60 60 60
(b) (c) (d)
40 40 40
Nonlinerity / pm
Nonlinerity / pm
Nonlinerity / pm
20 20 20
0 0 0
-20 -20 -20
2.20 2.22 2.24 2.26 2.28 6.90 6.92 6.94 6.96 6.98 11.92 11.94 11.96 11.98 12.00
t / ms t / ms t / ms
32 (e) 32 (f) 32 (g)
Amplitude / pm
Amplitude / pm
Amplitude / pm
24 24 24
16 16 16
8 8 8
0 0 0
0.00 0.08 0.16 0.24 0.32 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Frequency / MHz Frequency / MHz Frequency / MHz
Figure 5.
Figure 5. Experimental
Experimental resultsresults ofof nonlinearities
nonlinearities inin condition
condition of of non-uniform
non-uniform motion with
motion with
2
∆f = 5 MHz, a = 5 m/s , A:α
2 1 :α2 = B:β :β = 10,000:6:2. (a) time domain; (b–d) partial enlarged drawings for
∆ f = 5 MHz, a = 5 m/s , A : α1 : α21 =2 B : β1 : β2 = 10, 000 : 6 : 2. (a) time domain; (b–d) partial
the beginning,
enlarged drawingsmiddle,
for the and end parts
beginning, of (a)and
middle, with
endtime
partslength of 0.08
of (a) with timems; (e–g)
length spectrums
of 0.08 of
ms; (e–g)
(b–d), respectively.
spectrums of (b–d), respectively.
4. Conclusions
4. Conclusions
Measurement method
Measurement methodof of nonlinearity
nonlinearity playsplays an essential
an essential roledevelopment
role in the in the development of the
of the heterodyne
heterodyne laser interferometers with ultra-high accuracy. The application of the existing
laser interferometers with ultra-high accuracy. The application of the existing methods is restricted methods is
restricted by the type of interferometers and the motion state of the target. To break
by the type of interferometers and the motion state of the target. To break through these limits, through these
alimits,
novelameasurement
novel measurement
method method is proposed
is proposed in this
in this study. study. By employing
By employing the double-channel
the double-channel quadrature
quadrature demodulation together with internal reference signals, this method
demodulation together with internal reference signals, this method is free from the heterodyne is free fromlaser
the
heterodyne laser
interferometer andinterferometer
the motion state and thetarget.
of the motion state of the
Additionally, fortarget. Additionally, for
phase demodulation, phase
the phase
demodulation, the phase differential algorithm is utilized to improve the computing
differential algorithm is utilized to improve the computing efficiency. The experimental results show efficiency. The
experimental results show that the proposed measurement method achieves accuracy
that the proposed measurement method achieves accuracy better than 2 pm. This method is expected better than 2 pm.
This
to method
benefit the is expected to of
development benefit the development
the next-generation of the
laser next-generation laser interferometers.
interferometers.
Author Contributions: Data curation, Y.W. Investigation, H.F. and R.J. Supervision, G.W. and J.T. Validation,
Author Contributions: Data curation, Y.W. Investigation, H.F. and R.J. Supervision, G.W. and J.T. Validation,
H.F., R.J., and P.H. Writing-original draft, H.F., R.J., and P.H. Writing-review & editing, G.W. and J.T.
H.F., R.J., and P.H. Writing-original draft, H.F., R.J., and P.H. Writing-review & editing, G.W. and J.T.
Funding: This
Funding: This research
research was
was financially
financially supported
supported byby the
the National
National Natural
Natural Science
Science Foundation
Foundation of
of China
China (NSFC)
(NSFC)
(51875140, 51675138), the China Postdoctoral Science Foundation (2017T100234), and the National Science and
Technology
Technology Major
Major Project
Project (2017ZX02101006-005).
(2017ZX02101006-005).
Conflicts
Conflicts of Interest: The
of Interest: The authors
authors declare
declare no
no conflict
conflict of
of interest.
interest.Sensors 2018, 18, 2768 9 of 9
References
1. Estler, W.T. High-accuracy displacement interferometry refin air. Appl. Opt. 1985, 24, 808–815. [CrossRef]
[PubMed]
2. Bosse, H.; Wilkening, U. Developments at PTB in nanometrology for support of the semiconductor industry.
Meas. Sci. Technol. 2005, 16, 2155–2166. [CrossRef]
3. Manske, E.; Jäger, G.; Hausotte, T.; Fusharpl, R. Recent developments and challenges of nanopositioning and
nanomeasuring technology. Meas. Sci. Technol. 2012, 23, 074001. [CrossRef]
4. Meskers, A.J.; Voigt, D.; Spronck, J.W. Relative optical wavefront measurement in displacement measuring
interferometer systems with sub-nm precision. Opt. Express 2013, 21, 17920–17930. [CrossRef] [PubMed]
5. Sutton, C.M. Non-linearity in length measurement using heterodyne laser Michelson interferometry. J. Phys.
E Sci. Instrum. 1987, 20, 1290–1292. [CrossRef]
6. Wu, C.; Su, C. Nonlinearity in measurements of length by optical interferometry. Meas. Sci. Technol. 1996, 7, 62–68.
[CrossRef]
7. Cosijns, S.J.A.G.; Haitjema, H.; Schellekens, P.H.J. Modeling and verifying non-linearities in heterodyne
displacement interferometry. Precis. Eng. 2002, 26, 448–455. [CrossRef]
8. Badami, V.G.; Patterson, S.R. A frequency domain method for the measurement of nonlinearity in
heterodyne interferometry. Precis. Eng. 2000, 24, 41–49. [CrossRef]
9. Pisani, M.; Yacoot, A.; Balling, P.; Bancone, N.; Birlikseven, C.; Celik, M.; Flügge, J.; Hamid, R.; Köchert, P.;
Kren, P.; et al. Comparison of the performance of the next generation of optical interferometers. Metrologia 2012,
49, 445–467. [CrossRef]
10. Wu, C.; Lawall, J.; Deslattes, R.D. Heterodyne interferometer with subatomic periodic nonlinearity. Appl. Opt. 1999,
38, 4089–4094. [CrossRef] [PubMed]
11. Seefeldt, J.D. Circuit to Reset a Phase Locked Loop after a Loss of Lock. U.S. Patent Grant No. 7423492,
9 September 2008.
12. Joo, K.N.; Ellis, J.D.; Spronck, J.W.; van Kan, P.J.; Schmidt, R.H.M. Simple heterodyne laser interferometer
with subnanometer periodic errors. Opt. Lett. 2009, 34, 386–388. [CrossRef] [PubMed]
13. Weichert, C.; Köchert, P.; Köning, R.; Flügge, J.; Andreas, B. A heterodyne interferometer with periodic
nonlinearities smaller than ±10 pm. Meas. Sci. Technol. 2012, 23, 2910–2916. [CrossRef]
14. Bobroff, N. Recent advances in displacement measuring interferometry. Meas. Sci. Technol. 1993, 4, 907–926.
[CrossRef]
15. Quenelle, R.C. Nonlinearity in interferometer measurements. Hewlett-Packard J. 1983, 34, 10.
16. Hou, W.; Wilkening, G. Investigation and compensation of the nonlinearity of heterodyne interferometers.
Precis. Eng. 1992, 14, 91–98. [CrossRef]
17. Hu, P.; Wang, Y.; Fu, H.; Zhu, J.; Tan, J. Nonlinearity error in homodyne interferometer caused by multi-order
Doppler frequency shift ghost reflections. Opt. Express 2017, 25, 3605–3612. [CrossRef] [PubMed]
18. Fu, H.; Wang, Y.; Hu, P.; Tan, J.; Fan, Z. Nonlinear errors resulting from ghost reflection and its coupling with
optical mixing in heterodyne laser interferometers. Sensors 2018, 18, 758. [CrossRef] [PubMed]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access
article distributed under the terms and conditions of the Creative Commons Attribution
(CC BY) license (http://creativecommons.org/licenses/by/4.0/).You can also read