State-dependent Additive Covariance Inflation for Radar Reflectivity Assimilation
←
→
Page content transcription
If your browser does not render page correctly, please read the page content below
State-dependent Additive Covariance Inflation
for Radar Reflectivity Assimilation
*1Yokota. S., 1,2H. Seko, 3,1M. Kunii, 4,1H. Yamauchi, 1E. Sato
1Meteorological Research Institute, JMA
2Japan Agency for Marine-Earth Science and Technology
3Numerical Prediction Division, Forecast Department, JMA
4Administration Division, Observation Department, JMA
2018/3/5-9 ISDA2018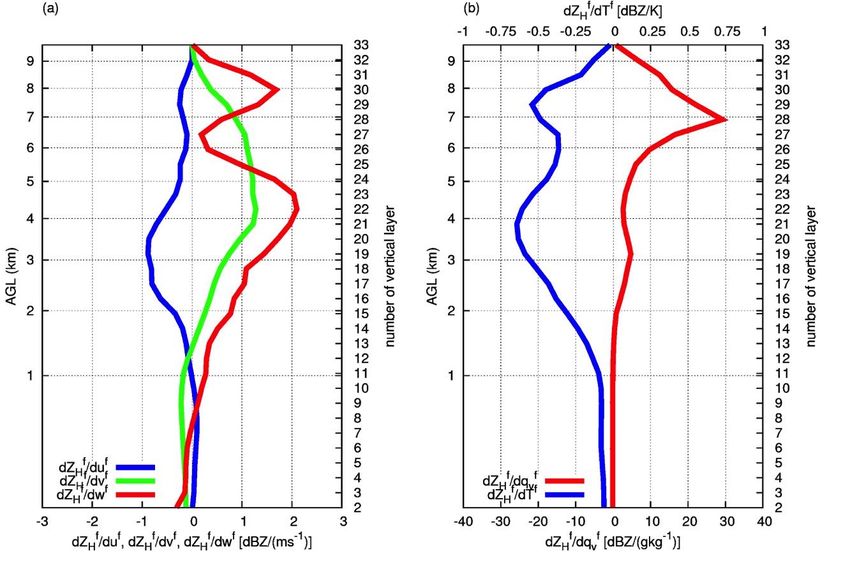
Introduction 1/15
How to Assimilate Radar Reflectivity Directly
Atmospheric State Forecast
Hydrometeor
(wind, temperature, (cloud water, cloud ice,
pressure, humidity) rain, snow, graupel)
Cause Result
should be modified by observed by radars
reflectivity assimilation
To improve rainfall forecast by “direct” assimilation of radar
reflectivity, atmospheric state should be modified based on
correlation between the Atmospheric State and Hydrometeor
[3DVar] given climatologically (difficult to be estimated)
[4DVar] calculated by linear model (difficult to make the model)
[EnKF] calculated by ensemble forecasts (not difficult, but …)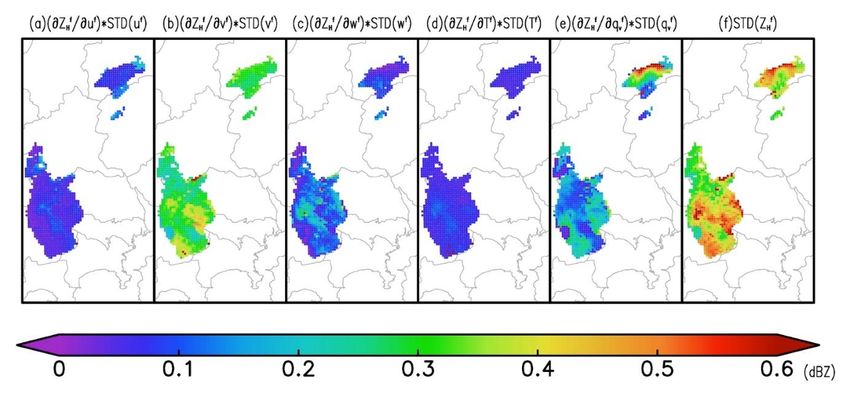
Introduction 2/15
Problem of Reflectivity Assimilation with EnKF
Reflectivity assimilation First guess:
with EnKF mean of ensemble forecasts
Analysis (uf, vf, wf, Tf, pf, qvf, qcf, qcif, qrf, qsf, qgf)
x a x f K Z Hobs Z Hf
Kalman gain: Observed Forecasted
weight of average between reflectivity reflectivity (dBZ)
first guess and observation (dBZ) calculated from
K BH HBH R
T T 1 (qrf, qsf, qgf )
Obs. error covariance (given)
E x f Z Hf EZ f
H Z Hf Forecast error covariance
(calculated by ensemble forecast)
Problem: If rainfall is not forecasted, δZHf=0 (no impact of ZH assimilation)
→ One solution: Inflation of δZHf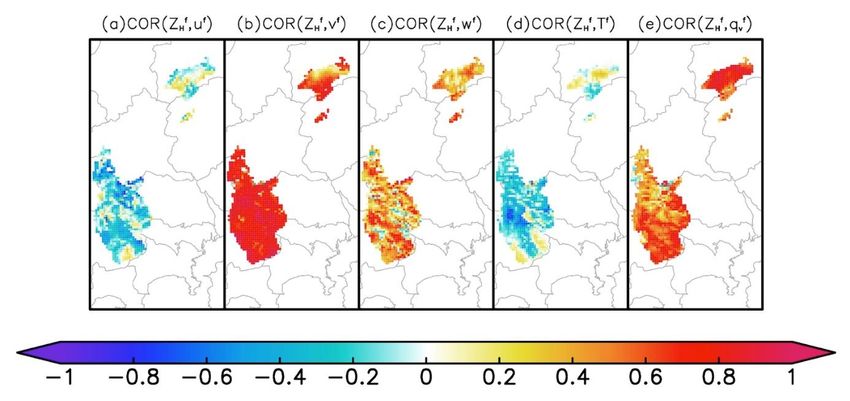
Introduction 3/15
3-type Error Covariance Inflation
K BHT HBHT R
1
1. Multiplicative x if x if 1
E x f Z Hf EZ f
H Z Hf
(Anderson and Anderson 1999)
→ If δZHf=0, BHT=0
2. Additive x if ( a ) x if ( a ) q i q i
~ N 0, 2
(Mitchell and Houtekamer 2000)
→ If δZHf=0, BHT=E[δxifqi]=0
because qi is random perturbation
3. Relaxation to prior x ia x if 1 x ia 0 1
(Zhang et al. 2004)
→ If δZHf=0, BHT=0
→ We propose to introduce
non-random δZH that has reasonable correlation with δxf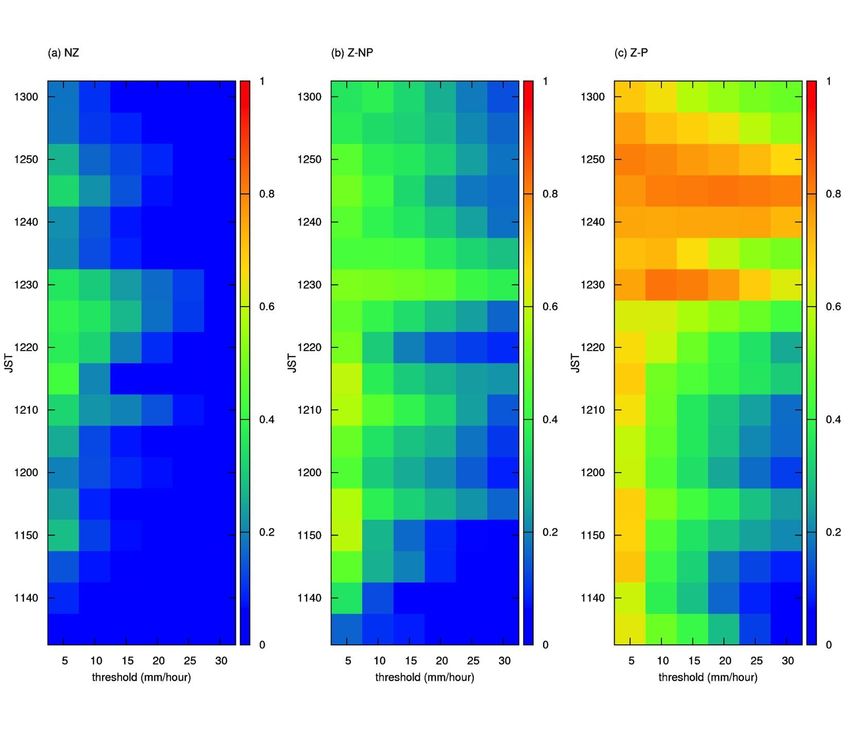
Introduction 4/15
State-dependent Additive Inflation of ZHf
ZHf of member i is replaced with following δZHf(i) before assimilation
if rainfall is not forecasted at obs. points in all members
water vapor ZHf @z*=2km
zonal wind meridional wind vertical wind temperature mixing ratio (2012/5/6 1110JST)
Z Hf Z Hf Z Hf Z Hf Z Hf
Z f (i )
u f (i )
v f (i )
w f (i )
T f (i )
q
f (i )
u f v f w f T f qv
H f v
Slope of regression line of qvf
for ZHf calculated with all This term is calculated in points
grids in each vertical level where rainfall is not forecasted
ZHf Member 2 ZHf
Slope: Slope:
Grid (1,1)
∂ZHf/∂qvf ∂ZHf/∂qvf
(∂ZHf/∂qvf )δqvf(i)
Member 1 qvf JMA Radar
Grid (1,1) δqvf(i) Member i
(2km-CAPPI)
Member 1 Perturbation from
Grid (1,2) ensemble mean
qvf
→ Additional δZHf is not random but correlated with (uf, vf, wf, Tf, qvf)
→ Atmospheric state can be modified by ZH assimilation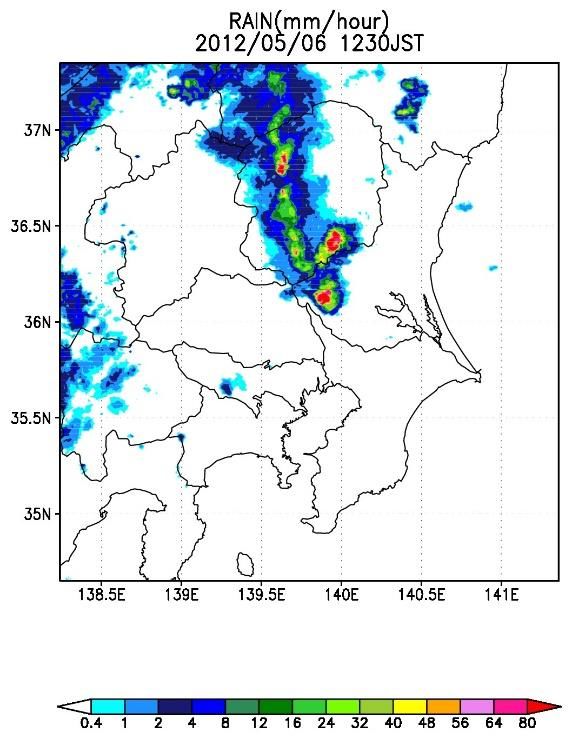
Experiment to Check Impact of δZHf 5/15
Target: Tornadic Supercell in 6 May 2012
3 tornadoes were generated almost simultaneously at 1230 JST.
South one is estimated F3 (70-92 m/s).
There were dense radar and surface observations. JMA radar
MRI advanced C-band Damaged area
solid-state polarimetric
(MACS-POL) radar
MRI
→ Development of the tornadic supercell
was observed in detail by MACS-POL
→ Suitable for investigating assimilation
impact of the polarimetric radar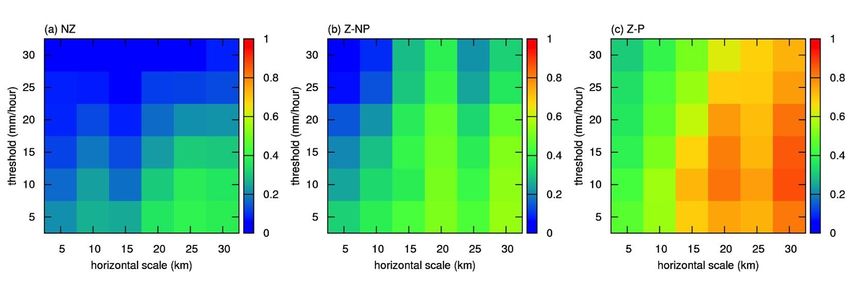
Experiment to Check Impact of δZHf 6/15
Local ensemble
Assimilation Experiments with LETKF transform
Kalman filter
6 May 03 JST 6 May 09 JST
From 3 May 09 JST LETKF Analysis LETKF Analysis 6 May 13 JST
Downscaling
15km-LETKF Boundary Condition
every hour
Grid interval: 15 km
Ensemble size: 50
Downscaling
6 hour analysis window 5km-LETKF Boundary Condition
(Observation every hour) Grid interval: 5 km every 10 minutes
Ensemble size: 50
1 hour analysis window 11 JST
Hourly operational
(Observation every 10 minutes) 1km-LETKF/EXT
obs. are assimilated Grid interval: 1 km Extended
every 6 hours 10-min radar (radial wind) Ensemble size: 50 forecasts
10 minutes analysis window
and surface obs. are (Observation every minute) from 1130JST
assimilated every 1 hour
15km-LETKF
5km-LETKF 1-min radar (radial wind and
: Ensemble forecasts reflectivity of MACS-POL)
: LETKF analysis and surface obs. are
: Abbreviation of 6-hour assimilated every 10 minutes
forecast-analysis cycle
1km-LETKF/EXT
Operational obs.: Surface (pressure), Radiosondes (wind / temperature /
humidity), Aircrafts (wind / temperature), Radars (Doppler wind /
humidity), Wind profiler radars (wind), Microwave scatterometers (wind),
(m)
Visible / infrared imagers (wind), and GNSS (precipitable water vapor)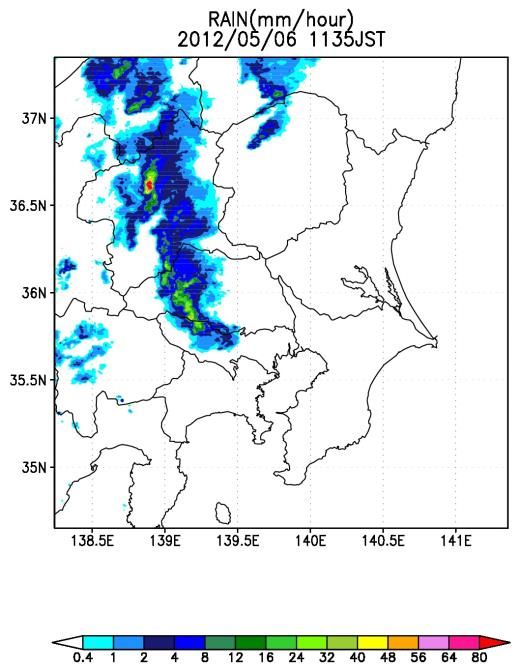
Experimental Design 7/15
How to Assimilate ZHobs
• ZHf[dBZ] is calculated from forecasted rain, snow, and graupel (qrf, qsf, qgf)
Set to be 1
é rain æ ö
7/4 Number concentration
r q f if T ≥ 0℃
Z H ( qr , qs , qg ) =10 log10 ê720N 0r ç
f f f f r
÷ (bright band) rain N 0 r 8 106 [m 4 ]
êë pr N
è r 0r ø snow N 0 s 1.8 106 [m 4 ]
snow
graupel N 0 g 1.1106 [m 4 ]
7/4
qsf s2
720 N 0 s 0.23 2
Theoretical
s N 0 s r Mass density
formulation in graupel q f 7 / 4 g2 rain r 1103[kg m 3 ]
720 N 0 g 0.23
g
1-moment cloud
N 2
snow s 84[kg m 3 ]
microphysics g 0 g r
graupel g 3 10 2 [kg m 3 ]
N D N 0 e D cf., Dowell et al. (2011)
• Observation error variance of ZHobs: σZ2=(5dBZ)2
• Attenuation of ZHobs is corrected by Z Hobs 0.073 obsDP Z H
obs
(Jameson 1992)
• ZHobs is interpolated to 2-km grid (influence radius: 1km) before assimilation
• ZHobs=0dBZ [σZ2=(50dBZ)2] is assimilated at points of ZHobs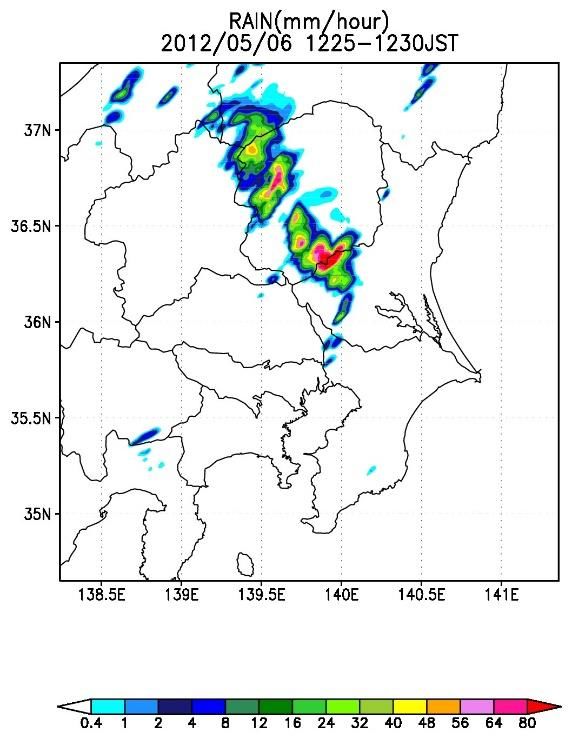
Results (2012/5/6) 8/15
Characteristic of Added δZHf
Z Hf Z f Z f Z f Z Hf
Slope of regression line (δZHf/δxf) in 1110JST Z Hf ( i )
u f
u f ( i ) Hf v f ( i ) Hf w f ( i ) Hf T
v w T
f (i )
qv
f
qv f ( i )
Large ZHf
⇔ Strong wf
∂ZHf/∂qvf
∂ZHf/∂uf
Large ZHf
∂ZHf/∂wf Large ZHf
⇔ Strong vf ∂ZHf/∂Tf
⇔ large qvf
∂ZHf/∂vf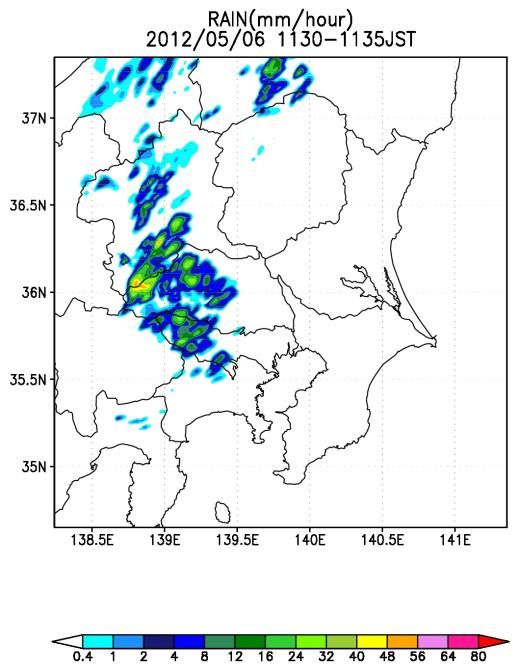
Results (2012/5/6) 9/15
Characteristic of Added δZHf
Z Hf Z f Z f Z f Z Hf
Z Hf ( i ) u f ( i ) Hf v f ( i ) Hf w f ( i ) Hf T f (i )
qv f ( i )
u f
v w T qv
f
Each term of standard
deviation of δZHf(i) (dBZ)
in 1110JST @5-km AGL
Contributions of δvf
and δqvf are larger uf vf wf Tf qvf TOTAL
Correlation between
xf=(uf, vf, wf, Tf, qvf) and δZHf
in 1110JST @5-km AGL
Large correlation
of δvf and δqvf
uf vf wf Tf qvfResults (2012/5/6) 10/15
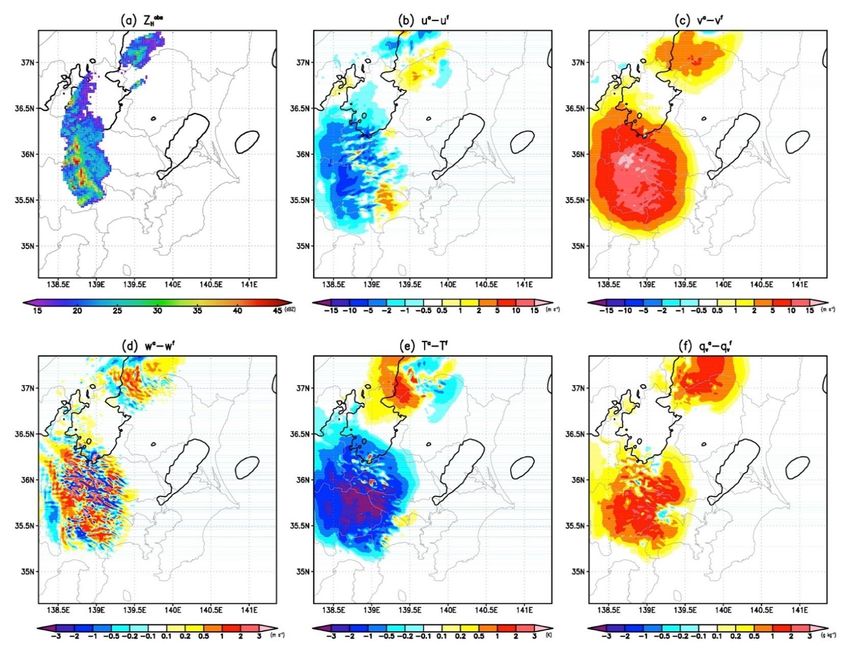
Modification of Atmospheric State by Additional δZHf
Analysis increment (xa–xf) in 1110JST @5-km AGL (Contour shows ZHf=0dBZ)
ZHobs assimilated
with perturbations
ua−uf va−vf Positive increment
of δvf and δqvf
where rainfall is
not forecasted
wa−wf Ta−Tf qva−qvfResults (2012/5/6) 11/15
Change of Rainfall Forecast by Additional δZHf
Rainfall in 1130-1300JST Assimilate ZHobs Assimilate ZHobs
Not assimilate ZHobs without additional δZHf with additional δZHf
(mm/hour)
JMA Radar
observationResults (2012/5/6) 12/15
Change of Rainfall Forecast by Additional δZHf
Rainfall in 1225-1230JST Assimilate ZHobs Assimilate ZHobs
Not assimilate ZHobs without additional δZHf with additional δZHf
(mm/hour)
JMA Radar
observation
F3 tornado was Strong rainfall
generated here was successfully
at this time forecastedResults (2012/5/6) 13/15
Fractions Skill Score Verification
To compare rainfall estimated Assimilate ZHobs Assimilate ZHobs
obs
by JMA radars at 1230JST Not assimilate ZH without additional δZHf with additional δZHf
JMA Radar
observation
strong
weak
small large small large small largeResults (2012/5/6) 14/15
Fractions Skill Score Verification
Verification using rainfall estimated by JMA radars between 1130-1300JST
(horizontal scale=20km) Assimilate ZHobs Assimilate ZHobs
Not assimilate ZHobs without additional δZHf with additional δZHf
Improvement
starts from the
initial time
and remains
for 90 min.
weak strong weak strong weak strong15/15
15/36
Summary
• Summary
• To improve rainfall forecast by “direct” assimilation of ZH,
atmospheric state should be modified based on correlation
between the Atmospheric State and Hydrometeor
• However, there is no impact of assimilation of ZH at points
where rainfall is not forecasted
→ We suggest to add ZH perturbations correlated with the
atmospheric state before assimilation at points where rainfall
was not forecasted. (It has possibly to improve short-term rainfall
forecast.)
• Future issues
• Applying to other cases (local rainfall, snow, and so on)
• Improving making perturbations when the number of samples is small
• Improving attenuation correction of snow and graupel
Acknowledgements: This work was supported in part by “Social and Scientific Priority Issues (Theme 4) to Be Tackled by Using Post K
Computer of the FLAGSHIP2020 Project” (ID: hp160229, hp170246), “Tokyo Metropolitan Area Convection Study for Extreme Weather
Resilient Cities (TOMACS),” and JSPS KAKENHI Grant Number JP16K17804 and JP16H04054. Radar data were provided from JMA and
Ministry of Land, Infrastructure, Transport and Tourism. Surface data were provided from JMA and NTT DOCOMO, Inc.You can also read